
- 1行人重识别简介+数据集+核心论文点_清华大学夏季行人vana77
- 2一文读懂MEMS技术4大主要分类及应用领域
- 3百度墨斗鱼文库创作中心源码分析_百度墨斗鱼源码
- 4基于FPGA的哈希表设计_fpga hash表
- 5GPT-3.5 接口教程 | 实现计数窗口的大数据处理_android 如果和接入gpt3.5
- 6OpenCV实现SfM(三):多目三维重建_cv:: solvepnpransac ( object_points , image_points
- 7Unity 图片序列帧动画的三种方法(个人总结,若有其它方法欢迎交流)_unity如何把多张图片变成序列帧
- 8FastAdmin中RequireJs是如何调用的_fastadmin js文件中定义的方法如何调用
- 9Http与Https区别及404状态码
- 10华为“老司机”亲身经历告诉你,华为硬件究竟是如何开发?
lvi-sam 代码阅读 和 总结_lvi sam 代码 激光深度点和视觉特征点匹配后
赞
踩
文章目录
Lvi-sam
lidar-visual-inertial odometry and mapping system
-
激光-视觉-IMU 里程计和建图,结合了
lio-sam和vins-mono系统的优点。 -
总体框架示意图:

-
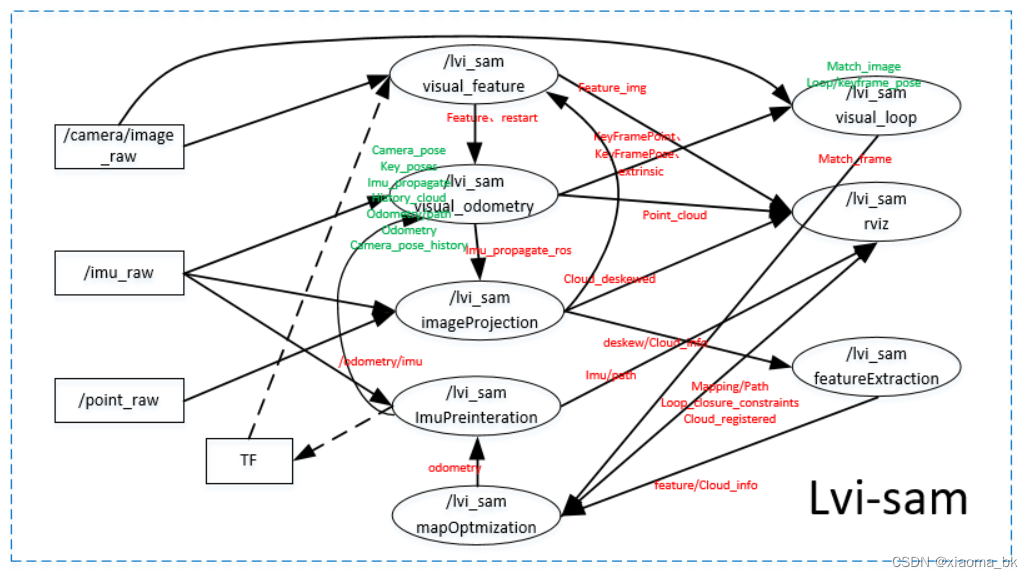
各个节点 数据传输示意图
心得
- 为相机特征点预估深度
- 3D激光点的共视区域给相机中每个像素点预估深度,通过多帧激光帧融合确保每个像素值都有值
- 无激光运行时,采用 三角化 进行计算每个特征点深度(初始时对极几何)
- 视觉里程计为3D激光去畸变,位置和角度
- 若无视觉里程计,则只能imu去畸变,只去角度
- 激光优化中,视觉里程计为初始值提供预估,若没有视觉里程计,则imu提供角度,imu没有则上一帧位姿作为当前位姿
- 回环:视觉可提供回环,激光也能提供回环
- 激光优化回调算例 很吃力啊,构建submap并优化,全局因子图优化,很吃算力
依赖运行
-
依赖:
-
ros 测试: kinetic and melodic (16.04 和20.04)
-
gtsam:https://gtsam.org/get_started/
sudo add-apt-repository ppa:borglab/gtsam-release-4.0sudo apt install libgtsam-dev libgtsam-unstable-dev
-
ceres:https://github.com/ceres-solver/ceres-solver/releases
sudo apt-get install -y libgoogle-glog-dev sudo apt-get install -y libatlas-base-dev wget -O ~/Downloads/ceres.zip https://github.com/ceres-solver/ceres-solver/archive/1.14.0.zip cd ~/Downloads/ && unzip ceres.zip -d ~/Downloads/ cd ~/Downloads/ceres-solver-1.14.0 mkdir ceres-bin && cd ceres-bin cmake .. sudo make install -j4 ```- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
-
-
运行:
- 编译:catkin build (catkin_make也一样)
- 下载bag:https://drive.google.com/drive/folders/1q2NZnsgNmezFemoxhHnrDnp1JV_bqrgV
- 运行:
- 运行bag:
rosbag play handheld.bag - 运行程序:
roslaunch lvi_sam run.launch
- 运行bag:
vins
visual_feature
主函数:
-
初始化Ros节点
-
设置Log等级
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Warn); -
读取参数 每个节点都读取一遍,好费劲
-
-
读取相机参数 N个相机参数单独读取
- 如果有鱼眼相机时,读取鱼眼mask
-
初始化深度寄存器(在读取参数后) DepthRegister
-
订阅 激光和图像 话题,若不适用激光时,
sub_lidar.shutdown();- img_callback
- lidar_callback (去过畸变的点云)
-
发布topic:
- feature,restart(视觉里程计用)、feature_img(rviz)
-
两个线程,
MultiThreadedSpinner, 用于并行处理(图像和激光雷达)
lidar_callback
-
1、跳帧,
++lidar_count % (LIDAR_SKIP+1) != 0 -
2、得到 vins_world 到 body的转换关系transNow
- tf listen 读取失败时 return
- 转换为
Eigen::Affine3f
-
3、点云数据处理
- laser cloud 转换为 pcl
- 降采样 (0.2,0.2,0.2)
- 点云滤波(仅在相机视图中保留点)
x>=0&&y/x<=10&&z/x<=10 - 由激光坐标系转换为 相机坐标系
pcl::transformPointCloud - 转换到全局里程计坐标系,使用了 tf接听的transNow
-
4、保存点云队列 点云+time 两个队列 cloudQueue、timeQueue
-
5、弹出队列中老的数据,保留5s数据
-
6、融合队列中的点云数据
depthCloud,即将队列中所有点云数据相加 -
7、融合后的点云数据降采样,(0.2,0.2,0.2)
img_callback
- 若 first_image_flage 时,赋值
first_image_time、last_image_time返回 - 相机数据流稳定性检测,时间间隔>1s 或者 时间回跳
- 异常时,发送 restart标志,并return
- 发布当前帧频率控制
PUB_THIS_FRAME,发布时 ++pub_countround(1.0 * pub_count / (cur_img_time - first_image_time)) <= FREQ- 重置 pub_count ,first_image_time
- image数据转换为cv::Mat,并trackerData[i].readImage,核心:readImage
PUB_THIS_FRAME时,发布topic,pub_feature,注:depthRegister->get_depth
readImage
-
直方图均衡化,参数:
cv::createCLAHE(3.0, cv::Size(8, 8) -
若 forw_img是空, 则
prev_img = cur_img = forw_img = img; -
若
cur_pts.size() > 0时,光流跟踪,当前跟踪特征点forw_pts- 光流跟踪
cv::calcOpticalFlowPyrLK - 删除 无效的特征点
- 光流跟踪
-
若发布 该帧时
- 设置Mask,非极大值抑制
- 若 该帧特征点个数小于预设最大值时,进行额外提取
cv::goodFeaturesToTrack - 并添加额外增加的点
-
赋值,并去畸变 undistortedPoints
cv::undistortPoints不过使用相机模型中:m_camera->liftProjective- 若有上一帧有匹配点时,进行速度预测
get_depth
-
初始化深度 通道,为返回做准备
name = "depth",values.resize(features_2d.size(), -1)
-
若无深度点云时,直接返回了,深度点云由
lidar_callback得到 -
得到当前时间段 body到世界坐标系的位姿
transNow -
将点云从 世界坐标系转换到相机坐标系
transNow.inverse() -
将特征点投影到单位球面上,z 总是为1 features_3d_sphere
- 转换到ros标准坐标系,x = z, y =-x,z=-y
- 标准:前x,左y,上z,相机:前z,右x,下y
- 强度用来存储深度,赋值 -1
-
定义求取深度的图片(-90°,90°),分辨率 bin_res =180/360
-
遍历所有的深度点,计算raw_id,col_id,若在图像范围内,仅保留最近的点
row_angle =atan2(p.z, sqrt(p.x * p.x + p.y * p.y)) * 180.0 / M_PI + 90.0- 为了转换到 [0,180],故需要加90°
col_angle = atan2(p.x, p.y) * 180.0 / M_PI;- row_id = row_angle / bin_res,col_id=col_angle/bin_res。
- 若已经更新时,只取最近的
-
depth_cloud_local赋值,发布深度到vins_body_ros坐标系
-
将深度点云图 depth_cloud_local进行归一化,得到 depth_cloud_unit_sphere
- x,y,z/range ,强度保存了深度值,
-
通过归一化深度图 depth_cloud_unit_sphere,创建 kd_tree
-
遍历 归一化特征点features_3d_sphere,得到各个点的深度
- 在 kd_tree中找到3个临近的点,阈值5个像素的平方
- 可以找到3个且距离小于阈值时,做如下操作:
- 取3个点数据:A、B、C, 每个点的三维坐标(归一化坐标*深度)和深度r
- 归一化特征点 V V V(归一化坐标)
- 计算ABC确定的法向量 N N N
- 计算原点到 平面的距离
(N(0) * A(0) + N(1) * A(1) + N(2) * A(2)) - 计算原点到 归一化特征点与法向量
N
N
N确定的平面的距离
(N(0) * V(0) + N(1) * V(1) + N(2) * V(2)) - 得到 归一化特征点的深度 s = 上述二者相除
- 若 3个点的深度相差2m 或 深度小于 0.5m时,s不变
- s若深度大于3个点的最大深度,则赋最大深度,若小于最小深度时赋值最小深度
- 还原特征的3d信息 (归一化数据乘以深度值) features_3d_sphere,
-
若发布深度图,则赋值不同颜色显示,并发布
-
跟新各个特征的深度点depth_of_point,并返回
visual_odometry
主函数:
- 构造
Estimator estimator全局变量 - 初始化 ros
- 读取参数,并
estimator.setParameter()- 相机外参,td,信息矩阵
- 订阅
restart_callback- imu_callback
- odom_callback
- feature_back
- 若不使用 激光时
sub_odom.shutdown(); - 定义主线程 measurement_process{process};
- 两个线程,
MultiThreadedSpinner, 用于并行处理
imu_callback
- 若imu 数据 时间回跳或不变时,直接 打印警告并return
- 将imu数据push 到 imu_buf 中,互斥锁
m_buf - 条件唤醒主线程
- 发布 最近的里程计,用于rviz显示
odom_callback
- 将数据放入 odomQueue 中,互斥锁
m_odom
feature_callback
- 将数据放入 feature_buf 中,互斥锁
m_buf - 条件唤醒主线程
process main_thread
- while ros::ok
- 条件唤醒
measurements !=0- measurements =getMeasurements
- 遍历
measurements- imu 预积分
- imu_msg.time <= img_msg.time
estimator.processIMU - 否则,基于上次线加速度和角加速度 使得二者完全对齐
- imu_msg.time <= img_msg.time
- image[feature_id]构造
- imu 预积分
- 从激光雷达里程计获取初始化信息 odomRegister->getOdometry
- 由于用到odometry数据,因此 互斥锁
m_odom
- 由于用到odometry数据,因此 互斥锁
- 处理图像 processImage
- 可视化
- 发布里程计,关键帧Pose,相机Pose,发布Tf,发布关键帧
- 条件唤醒
other_function
getMeasurements
- while 1循环
- imu_buf 和 feature_buf 有一个为空时 return
- imu_buf.back未包含 feature_buf.fornt 时间时,return
- imu_buf结束时间未包含要打包的 feature数据,跳过
- imu_buf.front 未包含 feature_buf.fornt 时间时,feature_buf弹出,continue
- imu_buf起始时间未包含feature数据时,将其弹出
- 因为数据时间是递增的,永远不会包含,扔掉
- 打包 imu_buf小于 feaure_buf.font的数据,即:[Imus,feaure_buf.font]
getOdometry
-
重置 odometry_channel(18,-1)
- id(1), P(3), Q(4), V(3), Ba(3), Bg(3), gravity(1)
-
激光里程计部位空时,丢掉里程计较老的帧,
odom<img_time-0.05? pop_fornt -
激光里程计为空时,直接返回
-
得到 最接近的 q_odom_lidar
- 找到最接近图像时间的里程计
odomCur,小于图像视觉的最近里程计帧 - 若里程计
odomCur与img时间间隔大于 0.05,直接return
- 找到最接近图像时间的里程计
-
将其转换到 激光坐标系 q_odom_cam
-
转换 里程计位姿从激光坐标系到 相机坐标系
odomCur转换为 p_eigen,v_eigen- p_eigen,v_eigen = q_lidar_to_cam_eigen* p_eigen,v_eigen
- p_eigen,v_eigen 转换为
odomCur
-
返回 odometry_channel,由
odomCur转换而来
processImage
- addFeatureCheckParallax 添加特征到feature,并计算跟踪的次数和视差,评判出是否为关键帧
- 若为关键帧,边缘化老帧;否则边缘化新帧
- 如果有有激光里程计且初始化有效时,边缘化老帧
- 将该帧添加到 all_image_frame中,并重新开始预积分
- 若需标定外参时,进行旋转外参标定 CalibrationExRotation 标定成功后改变状态
- 若系统为初始化状态时:
- 若滑窗内帧个数不足预设值时,push帧
- 进行初始化 initialStructure
- 初始化成功后,状态为非线性优化,并进行
- 求解里程计 solveOdometry
- 移动滑窗 slideWindow
- 移除为跟踪的特征点 f_manager.removeFailures()
- 赋值
- 否则:移动滑窗 slideWindow
- 否则系统费初始化状态:
- 求解里程计 solveOdometry
- 若求取失败,则重启 vins 系统
- 移动滑窗 slideWindow
- 移除为跟踪的特征点 f_manager.removeFailures()
- 赋值滑窗,准备VINS的输出
initialStructure
- 激光初始化
- 清除容器中的关键帧
- 遍历容器中的所有帧,is_key_frame=false
- 检测 窗口内的激光信息是否有效,无效时break
- 若窗口内激光信息有效时:
- 更新滑窗内的状态
- 更新重力方向
- 重置所有特征的深度,并进行三角化 triangulate
- 若该点特征深度有效时,则跳过三角化
- 返回true
- 清除容器中的关键帧
- 检测imu 的可观性
- 计算 帧间imu预积分 的加速度 (delta_v/dt)
- 计算 imu预积分 的加速度标准差钱
- 若标准差小于 0.25,则返回(已注销该句)
- 全局 sfm
- 遍历 所有特征点,添加观测约束 imu_j
- 遍历imu_j++,为该特征添加所有约束
- 足够的视差恢复 R,t relativePose
- 纯视觉恢复 滑窗位姿及特征 construct
- 遍历 所有特征点,添加观测约束 imu_j
- Pnp 求解所有帧
- 视觉Imu 对齐
triangulate
- 特征三角化,与原不同的是若该特征有深度时,直接跳过
visual_loop
主函数:
-
ros初始化,初始化节点+句柄+log等级显示
-
加载参数
- 评判参数路径是否正确
- 闭环所用到的参数 yaml
-
如果 需闭环:参数设置
- 初始化词袋
- 初始化 brief 提取
- 初始化相机模型
-
订阅话题:
- image_call
- 视觉里程计的关键帧 位姿 pose_callback
- 视觉里程计的关键帧 特征点 point_callback
- 视觉里程计的估计外参 extrinsic_callback
-
发布话题:
- 闭环匹配图片 pub_match_img
- 闭环匹配frame pub_match_msg
- 闭环关键帧位姿 pub_key_pose
-
若无闭环时,上述订阅发布话题都 shutdown
-
构建主线程 std::thread(process);
callback
- 回调函数就是将数据放入 buf中
pose_callback
- 无闭环时,直接return
- 将数据放入 pose_buf,互斥锁
m_buf
point_callback
- 无闭环时,直接return
- 将数据放入 point_buf,互斥锁
m_buf
image_callback
- 无闭环时,直接return
- 将数据放入 image_buf,互斥锁
m_buf - 检测 相机数据流的稳定性
- 检测图片 时间间隔和回跳
- 间隔>1s 或回跳时,所有队列都情况
extrinsic_callback
- 无闭环时,直接return
- 赋值 tic, qic,互斥锁
m_process
Process
- 无闭环时,直接return
- while ok
- 数据对齐
- 找到 image_msg、pose_msg、point_msg
- 三者时间一致,且互斥锁
m_buf
- 若 pose_msg != Null 时,即赋值了:
- 跳过前十帧
static int - 限制频率,跳过一些帧(与降频还不一样)
- 得到关键帧的位姿 pose_msg -> R ,T
- 添加关键帧
- 图片
- 关键帧的所有地图点
- 构造新关键帧
- m_process.addKeyFrame,互斥锁
m_process - 可视化 关键帧位姿 visualizeKeyPoses
- 跳过前十帧
- 5S执行一次 ,sleep_fors
- 数据对齐
addKeyFrame
- 根据 检测闭环标志 确定是否检测闭环,每帧都检测闭环
- 若检测闭环,则执行detectLoop
- 否则,只添加关键帧到词袋 addKeyFrameIntoVoc
- 如果检测到闭环,则 取到相应的帧,并为该帧找链接 findConnection
- 将当前帧放入 关键帧list中
detectLoop
- 1、brief词袋检测,并 返回结果,200frame以前
- 2、将该特征的描述子加入 该词袋中
- 3、遍历候选值,若 第一得分超过 0.05时,且临近超 0.015是,认为闭环成立
- 4、赋值闭环,找到距离最远的 闭环Id 得分需超 0.015
lio-sam
ImageProjection
与 lio-sam基本无差异,里程计由原 后端提供改为 视觉提供
structure
- 订阅 Topic:
- 订阅imu原始数据 imuHandler
- 订阅由vins提供的ros 里程计, odometryHandler
- 订阅雷达 cloudHandler
- 发布 Topic:
- 去完畸变后的点云
deskew/cloud_deskewed - 去完畸变,lvi-sam 的点云
deskew/cloud_info
- 去完畸变后的点云
- 为数据分配内存 allocateMemory
- 重置参数 resetParameters
odometryHandler
- 数据 push 进 odomQueue 队列
- 互斥锁
odoLock单独的
imuHandler
- 先进行imu数据的转换,由imu坐标系到 ros坐标系
- 数据 push 进 imuQueue 队列
- 互斥锁
imuLock单独的
cloudHandler
-
添加一帧激光点云到队列,取出最早一帧作为当前帧,计算起止时间戳,检查数据有效性
cachePointCloud
-
处理当前激光帧起止时刻对应的IMU数据、IMU里程计数据
deskewInfo
-
当前帧激光点云运动畸变校正projectPointCloud
-
提取有效激光点,存
extractedCloudcloudExtraction -
发布当前帧校正后点云,有效点 publishClouds
-
重置参数,接收每帧lidar数据都要重置这些参数 resetParameters
mapOptimization
- 定义ros节点,lidar
- 申明 mapOptimization 类
- 定义两个线程
- 闭环线程 loopClosureThread
- 全局地图可视化线程 visualizeGlobalMapThread
mapOptimization
- 订阅话题
- 激光特征 信息回调 laserCloudInfoHandler
- GPS 信号回调 gpsHandler
- 闭环信号 loopHandler
- 发布话题
- 轨迹、全局地图、里程计、路径
- 点云:历史点云、修正点云、约束
- 数据重置和内存分配
gpsHandler
- 数据放入
gpsQueue队列中
loopHandler
- 控制闭环频率,只有上次闭环检测与上一次相差5s时才进行
- 执行闭环操作 performLoopClosure
performLoopClosure
- 得到激光关键帧Id loopFindKey,操作如下
- 闭环帧当前时间 和 先前时间 loop_time_cur,loop_time_pre
- 从后往前遍历 点云关键帧位姿队列,找到 第一个>
loop_time_cur的frame:key_cur - 从前往后遍历 点云关键帧位姿队列,找到 第一个<
loop_time_pre的frame:key_pre
- 若当前帧已经找到闭环时,则不在进行闭环检测
- 因为:如果图像循环闭合频率很高,许多图像循环可能指向同一个key_cur
- 得到激光关键帧点云
- 得到 key_cur 临近的点云 loopFindNearKeyframes 临近 0
- 得到 key_pre 临近的点云,临近 25帧
- 若 当前帧点云个数<300,或者先前点云小于1000时,直接return
- 发布历史帧先前点云,rviz中,方便调试
- 得到关键帧位姿
pose_cur、pose_pre、pose_diff_t- 从位姿队列中直接读取,差异只取
位置xyz
- 从位姿队列中直接读取,差异只取
- 设置 ICP 匹配,并match
- 设置匹配半径
historyKeyframeSearchRadius * 2=40 - 最大迭代:100,ransac:0,Epsilo:1e-3
- 初始化当前点云
cureKeyframeCloud_new,基于pose_diff_t进行平移 - 使用icp进行匹配 align
- 设置匹配半径
- 添加图约束
- 若icp后得分 小于 阈值,则开始添加约束
- 取icp 平移量,进行位姿约束添加,由上面平移了pose_diff_t需注意
- 取 icp的噪声
getFitnessScore,作为噪声
- 若icp后得分 小于 阈值,则开始添加约束
- 可视化闭环约束,并发布
loopFindNearKeyframes
- 基于查询个数遍历,找到符合的角点和平面点
- 遍历范围 [-searchNum,searchNum]
- 角点和平面点基于位姿转换到 全局坐标系
- 角点和平面点放到 同一容器中
nearKeyframes
- 降采样数据
downSizeFilterICP,数据赋值nearKeyframes
laserCloudInfoHandler
- 取当前 数据的视觉戳
timeLaserInfoCur - 取当前 数据的 角点特征和平面点特征
- 若与上次激光数据映射 超过阈值时,进行如下的操作
- updateInitialGuess() 当前帧初始化
- 如果是第一帧,用原始imu数据的RPY初始化当前帧位姿(旋转部分)
- 后续帧,若vins_odom有效,则使用vins帧作用前一帧的激光位姿,得到当前帧激光位姿
- 否则,用imu里程计计算两帧之间的增量位姿变换,得到当前帧激光位姿
- extractSurroundingKeyFrames() 提取局部角点、平面点云集合,加入局部地图
- 对最近的一帧关键帧,搜索时空纬度上相邻的关键帧集合,降采样一下
- 对关键帧集合中的每一帧,提取对应的角点、平面点,加入局部地图中
- 先
nearby再extractcloud最后结束,这个就是对周围的关键帧做一个处理
- downsampleCurrentScan() 当前激光帧角点、平面点集合降采样
- scan2MapOptimization() 激光位姿图优化
- saveKeyFramesAndFactor() 因子图优化,更新所有关键帧位姿
- correctPoses() 更新因子图中所有变量节点的位姿,也就是所有历史关键帧的位姿,更新里程计轨迹
- 发布显示:
- publishOdometry()
- publishFrames()
- updateInitialGuess() 当前帧初始化
updateInitialGuess
- 若
cloudKeyPoses3D为空,即第一帧时,当前帧作为初始帧- 位置 Transform (0.0.0)
- 角度 Rotation 与重力对齐 (imuInit)
- return
- 若vins_odom有效时,得到当前帧的位姿:
- n o w l a s t T v i n s = l a s t O d o m T v i n s − 1 ∗ n o w O d o m T v i n s {^{last}_{now}T_{vins}={^{Odom}_{last}T_{vins}}^{-1}*^{Odom}_{now}T_{vins}} nowlastTvins=lastOdomTvins−1∗nowOdomTvins
- n o w O d o m T l i d a r = l a s t O d o m T l i d a r ∗ n o w l a s t T v i n s {^{Odom}_{now}T_{lidar}={^{Odom}_{last}T_{lidar}}*^{last}_{now}T_{vins}} nowOdomTlidar=lastOdomTlidar∗nowlastTvins
- 否则,若imu有效时,通过imu得到当前帧的位姿
- n o w l a s t T i m u = l a s t O d o m T i m u − 1 ∗ n o w O d o m T i m u {^{last}_{now}T_{imu}={^{Odom}_{last}T_{imu}}^{-1}*^{Odom}_{now}T_{imu}} nowlastTimu=lastOdomTimu−1∗nowOdomTimu
- n o w l a s t T i m u = ( n o w l a s t R i m u , t ( 0 , 0 , 0 ) ) {^{last}_{now}T_{imu}=(^{last}_{now}R_{imu},t(0,0,0))} nowlastTimu=(nowlastRimu,t(0,0,0))
- n o w O d o m T l i d a r = l a s t O d o m T l i d a r ∗ n o w l a s t T i m u {^{Odom}_{now}T_{lidar}={^{Odom}_{last}T_{lidar}}*^{last}_{now}T_{imu}} nowOdomTlidar=lastOdomTlidar∗nowlastTimu
- 否则不更新了,我认为可以基于前后帧位姿预估一下比较好
extractSurroundingKeyFrames
cloudKeyPoses3D中点云为空时,直接return- 否则执行:extractNearby()
extractNearby()
- 找最新关键帧周围位姿,并降采样
- 将 点云关键帧位姿数据放入
kdTree中,并找出最新关键帧位姿kdTree:半径:50m
- 将找出的位姿 进行降采样,降采样参数 [2m,2m,2m]
- 将 点云关键帧位姿数据放入
- 还提取一些最新的关键帧,以防机器人在一个位置旋转
- 与当前帧时间相差10s的添加进来
surroundingKeyPosesDS
- 与当前帧时间相差10s的添加进来
- 提取点云 extractCloud(surroundingKeyPosesDS)
extractCloud(surroundingKeyPosesDS)
- 遍历所有符合条件的帧,得到各帧世界坐标系下的角点和平面点
- 取该帧的Id ,若该帧与当前帧距离超过阈值时跳过
- 将当前帧特征点转换到世界坐标系下,并保存
- 融合地图,即 将上述符合条件的特征点想融合(点云直接相加)
- 将融合后的 角点和平面点 地图进行相应的降采样
scan2MapOptimization
- 要求当前帧特征点数量足够多,且匹配的点数够多,才执行优化
- 将上一步提取的地图放入kdTree中,方便查找最近点,迭代30次优化
- 当前激光帧角点寻找局部map匹配点 cornerOptimization()
- 更新当前帧位姿,(与哪个地图匹配需转到哪个地图)
- 将当前帧角点坐标变换到map系下,在局部map中查找5个最近点,距离小于1m,且5个点构成直线,则认为匹配上了(用距离中心点的协方差矩阵,特征值进行判断)
- 计算当前帧角点到直线的距离、垂线的单位向量,存储为角点参数
- 当前激光帧平面点寻找局部map匹配点 surfOptimization()
- 更新当前帧位姿,将当前帧平面点坐标交换到map系下,在局部map中查找5个最近点,距离小于1米,且5个点构成平面(最小二乘拟合平面),则认为匹配上了
- 计算当前帧平面点到平面的距离、垂线的单位向量,存储为平面点参数
- 提取当前帧中与局部map匹配上了的角点、平面点,加入同一集合 combineOptimizationCoeffs()
- LM迭代优化 LMOptimization 对匹配特征点计算Jacobian矩阵,观测值为特征点到直线、平面的距离,构建高斯牛顿方程,迭代优化当前位姿,存transformTobeMapped
- 基于特征值大小评判该方向是否可观,进而评判是否优化该方向
- 当前激光帧角点寻找局部map匹配点 cornerOptimization()
- 优化结果更新 transformUpdate ,用imu原始RPY数据与scan-to-map优化后的位姿进行加权融合,更新当前帧位姿的roll pirch 约束z坐标
saveKeyFramesAndFactor
该优化是独立于scan-map的另一个优化
- 评判当前帧是否 保存关键帧 saveFrame(),不保存return
- 计算当前帧与前一帧关键帧位姿的变化,如果变化太小,不设为关键帧,反之设为关键帧
- 添加激光里程计因子 addodomFactor()
- 若无关键帧时,协方差较大
Vector(6) << 1e-2, 1e-2, M_PI*M_PI, 1e8, 1e8, 1e8 - 有关键帧时,协方差较小,
Vector(6) << 1e-6, 1e-6, 1e-6, 1e-4, 1e-4, 1e-4
- 若无关键帧时,协方差较大
- 添加GPS因子 addGPSFactor()
- 等待系统初始化并稳定下来,否则 return
- 若无新的关键帧时跳过
- 如果 第一关键帧与最新关键帧距离小于5m时直接跳过
- 位姿协方差小于阈值时,跳过
- 遍历
gpsQueue队列,只添加当前帧 [-0.2,0.2]的数据- GPS 未初始化 或者噪声很大时跳过
- 添加GPS 到因子图
- 等待系统初始化并稳定下来,否则 return
- 添加 闭环因子 addLoopFactor()
- 添加闭环队列中的所有数据到因子图中,并 清空队列数据
- 执行因子图优化,得到当前帧优化后位姿,位姿协方差
- 添加cloudKeyPoses3D,cloudKeyPoses6D,更新transformTobeMapped,添加当前关键帧的角点、平面点集合
loopClosureThread
- 若不进行闭环检测时直接return
- 循环执行,每50ms执行一次闭环检测
- performLoopClosureDetection()
performLoopClosureDetection()
- 找最近的关键帧符合阈值(20m)的 关键帧数组
- 将所有关键帧放入kdTree中,并用最近距离查找
- 取当前帧的 3自由度位姿和 时间
- 找到 关键帧数组中 与当前帧时间之差 大于阈值的 关键帧
- 遍历 关键帧数组,若与当前帧时间超出阈值,则 break
- 最接近且时间符合阈值
historyKeyframeSearchTimeDiff: 30.0
- 执行闭环 performLoopClosure(match_msg);
- match_msg 存放当前帧和闭环帧的时间戳
- performLoopClosure 在 loopHandler中已经介绍了。
IMUPreintegration
FeatureExtraction
这两模块跟lio-sam一样

