- 1【机器学习:推荐系统】什么是推荐系统?
- 2全网最细海龟 (turtle) 画图讲解 (三):设置画笔样式_python的turtle模块更改画笔形状
- 3多表连接查询详细解析(详细版)_连表查询
- 4threeJS 实现加载模型 + 页面按钮交互 + 显示css2Renderer标注_css2drenderer
- 5unity中rectTransform的宽和高如何取_recttransform 获取宽度
- 6async python两个_摆脱js回调地狱,Async/Await实用指南,完美实现同步操作
- 7window pytorch unet代码学习之random_split_sum of input lengths does not equal the length of
- 8VS+Qt — Vistual Studio 2022+Qt6安装教程以及解决Qt Vistual Studio Tools下载慢和VS无法打开.ui进行设计的问题_legacy qt visual studio tools
- 9连接Sql2005报的错误:Caused by: com.microsoft.sqlserver.jdbc.SQLServerException: 到主机 的 TCP/IP 连接失败
- 10大模型入门到应用——LangChain:索引(Indexes)-[文本分割器(Text Splitters)]_langchain.text_splitter
3D激光SLAM(原理 + 公式 + 代码 理解)_激光slam建图原理
赞
踩
总结:
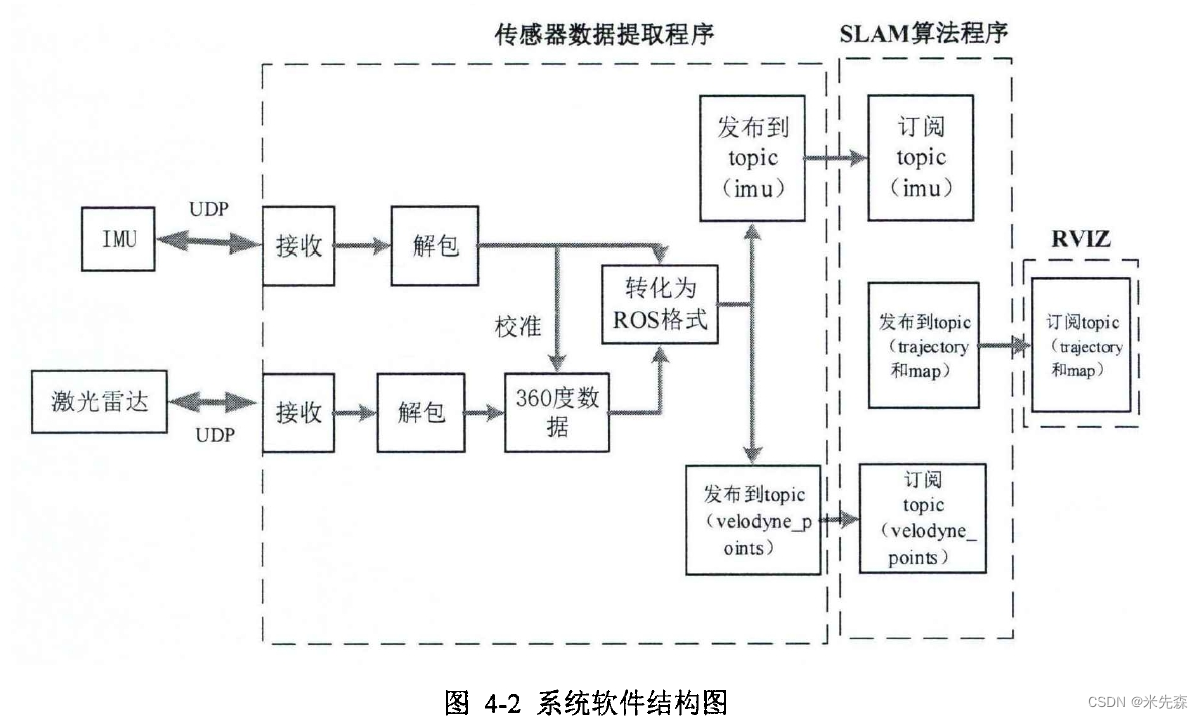
3D SLAM 的大体流程:(以多传感器融合为例)
(1) 首先进行传感器信息的读取: 包括激光雷达 . IMU(IMU 传感器可以提供 线加速度, 角速度 以及 旋转角RPY 信息)
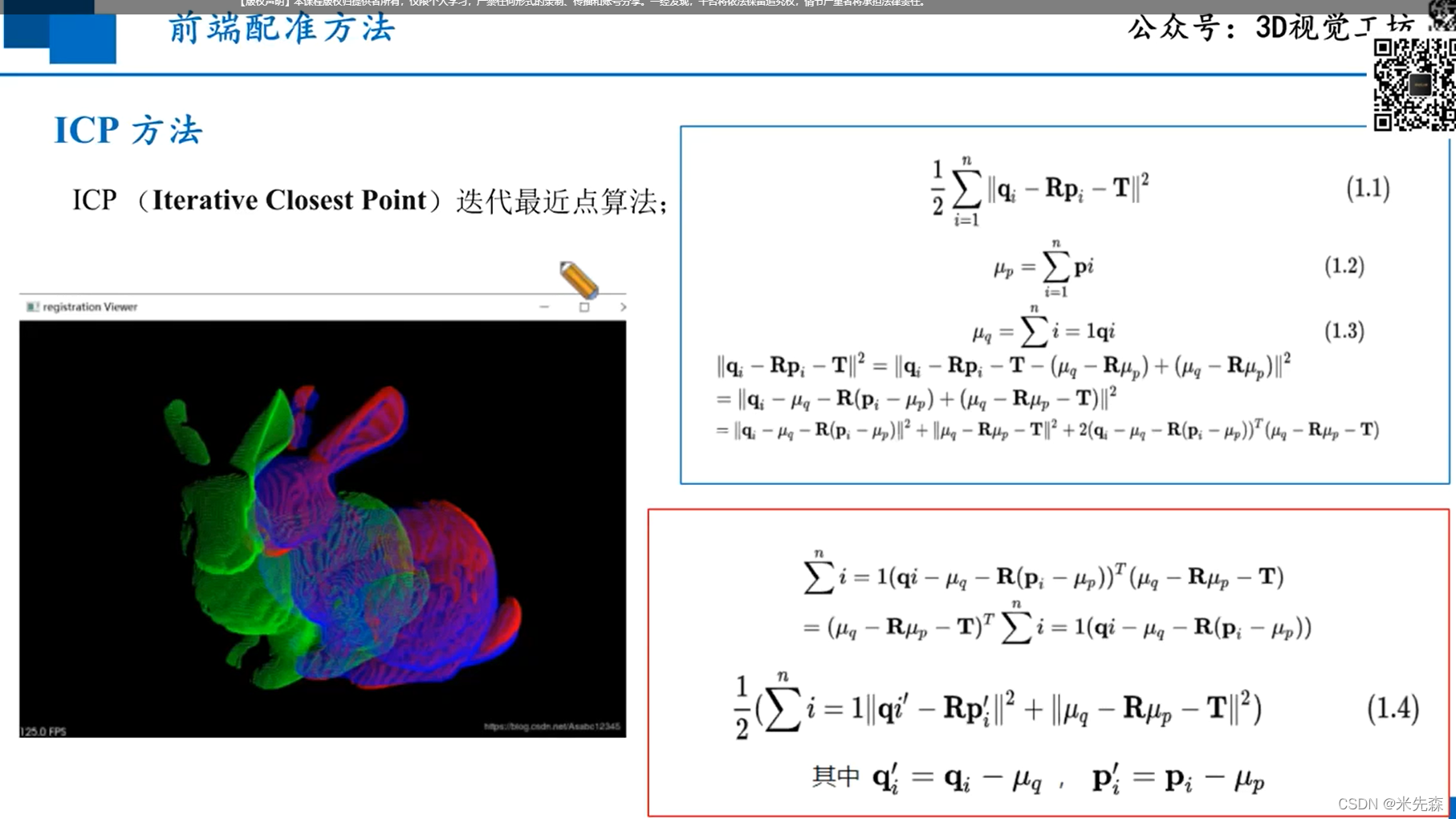
(2) 扫描匹配: 对得到的数据进行畸变处理,校正位姿, 对得到的相邻两帧点云 计算位置变换矩阵和平移矩阵,从而进行配准, 使得相邻的点云相同部分可以重叠. 得到一个局部的点云地图.这个过程中还要进行下采样处理,过滤掉无关的点云.
(3) 精确定位: 对得到的局部地图进行优化, 使其能够得到一个完整的地图. 这里就需要进行相应的后端优化, 进行局部地图的配准, 位姿矫正, 同时也要进行回环检测, 判断是否之前经过某个位置, 从而得到全局一致的轨迹 和 地图. 这个过程中还要进行下采样处理,过滤掉无关的点云.
(4) 构建地图: 根据估计的轨迹以及自身的位姿信息 建立未知环境下的地图.
利用GPS GNSS 传感器融合 目的就是为了校正 路径漂移,使得最后的路径结果能尽可能与真实的路径重合, 使漂移降到最低.
网图简单理解:
各种库:
Ceres: SLAM本质剖析-Ceres - 古月居
Eigen: SLAM本质剖析-Eigen - 古月居
值得注意的是Eigen函数库是不存在动态链接库的,我们在CMakeList.txt编译时候只需要引入include即可。[这篇博客关于Eigen 矩阵的函数 和 操作讲的挺清楚的]
G2O: SLAM本质剖析-G2O - 古月居
相较于Ceres而言,G2O函数库相对较为复杂,但是适用面更加广,可以解决较为复杂的重定位问题。Ceres库向通用的最小二乘问题的求解,定义优化问题,设置一些选项,可通过Ceres求解。而图优化,是把优化问题表现成图的一种方式,这里的图是图论意义上的图。一个图由若干个顶点,以及连着这些顶点的边组成。
Sophus:: SLAM本质剖析-Sophus - 古月居
李群 李代数 Eigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。但是Eigen库提供了集合模块,但没有提供李代数的支持。一个较好的李群和李代数的库是Sophus库,它很好的支持了SO(3),so(3),SE(3)和se(3)。Sophus库是基于Eigen基础上开发的,继承了Eigen库中的定义的各个类。因此在使用Eigen库中的类时,既可以使用Eigen命名空间,也可以使用Sophus命名空间。
PCL: SLAM本质剖析-PCL - 古月居
代码详解 :::: 信息的转换 , KDtree , Octree , 滤波, 三角化 , 分割 , NDT 配准,
Gtsam: SLAM本质剖析-GTSAM - 古月居
Scan Context回环检测解读和使用 - 古月居 基于SC 的回环检测
SLAM之划窗优化 - 古月居 滑动窗口
【math】 向量运算:叉乘_阳光快乐普信男的博客-CSDN博客_向量叉乘
点到直线距离以及雅克比矩阵计算见 泡泡机器人 文章
6-DoF相关基础知识整理_WangKingJ的博客-CSDN博客
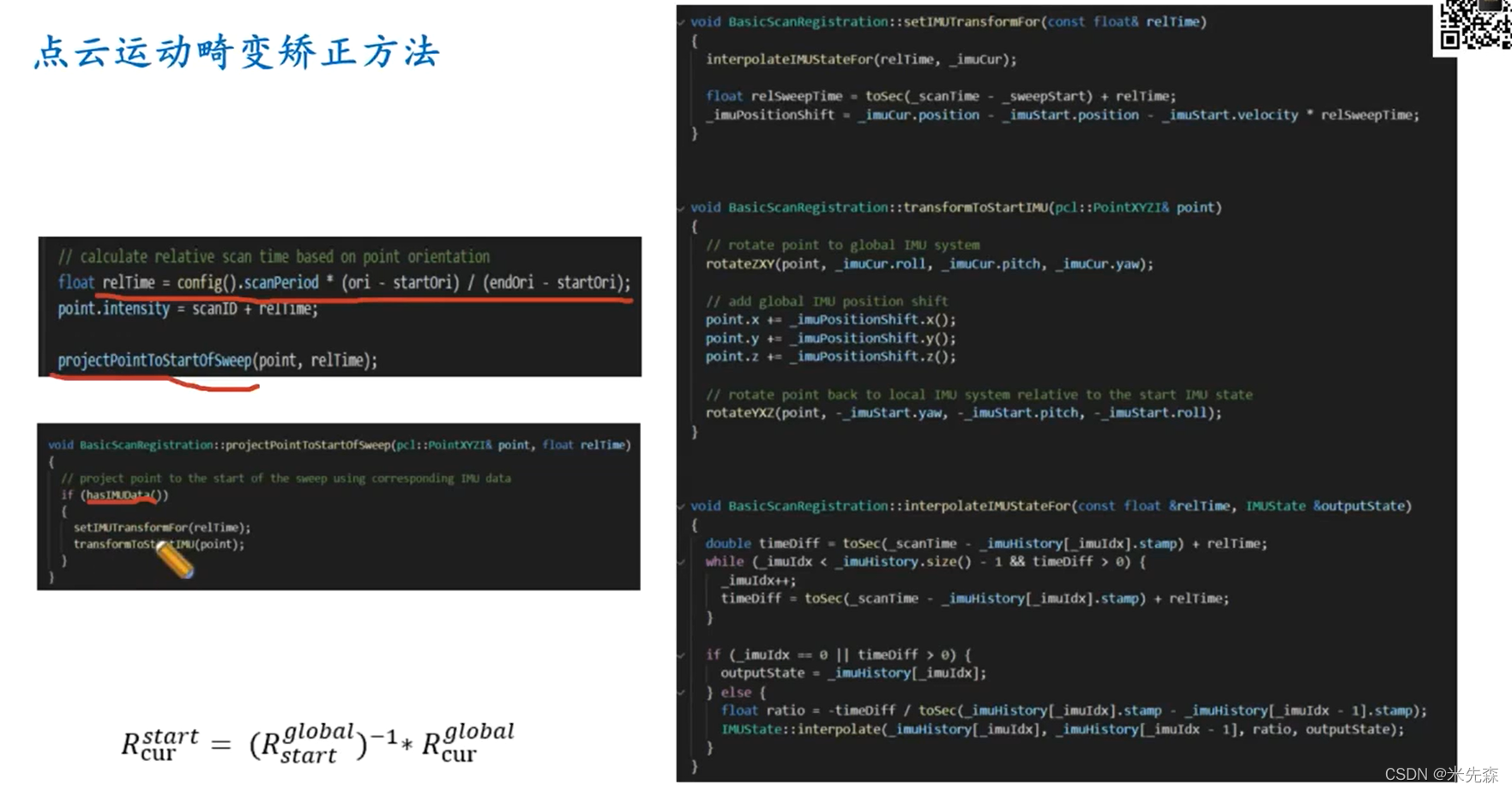
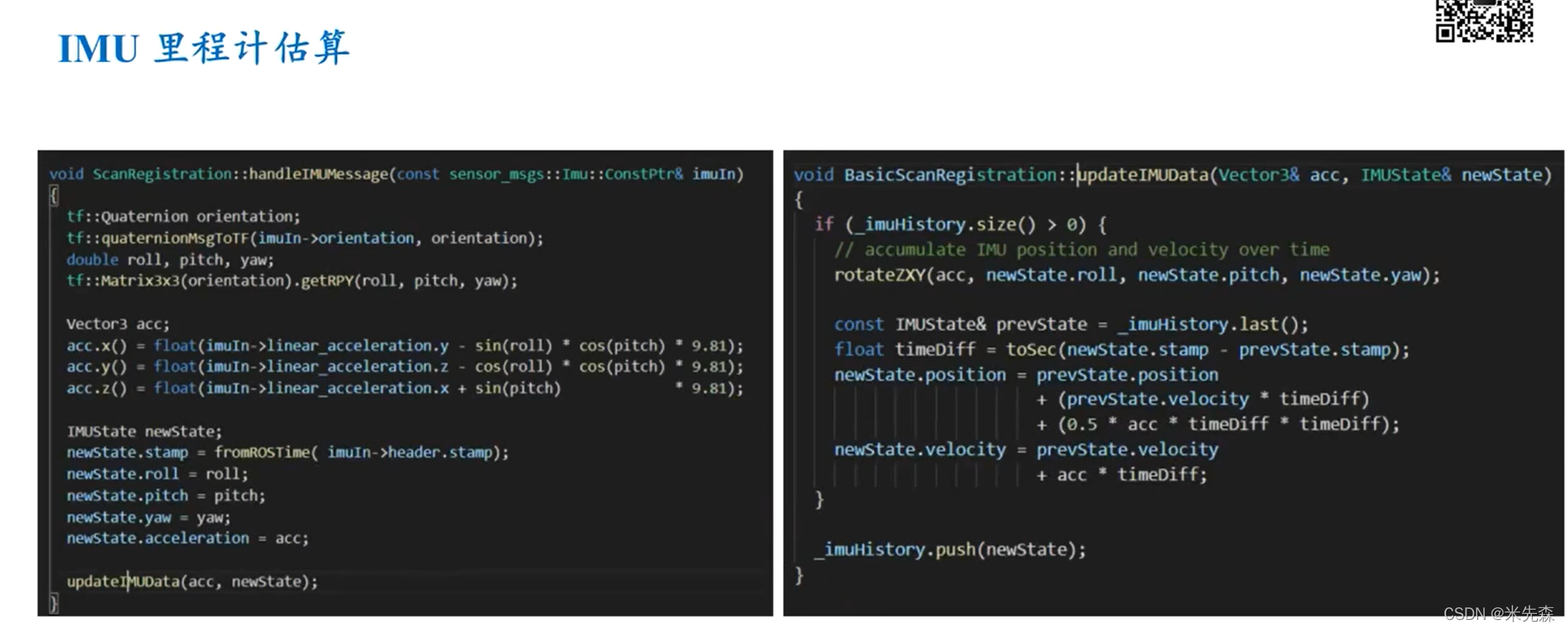
IMU 里程计估算 对应的LOAM 代码:
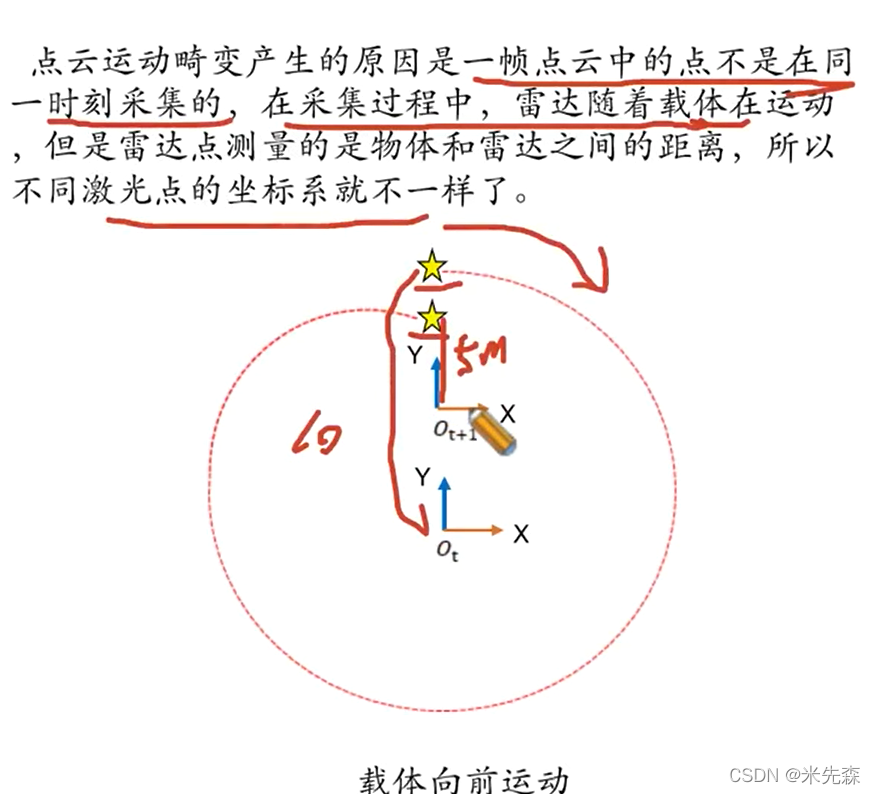
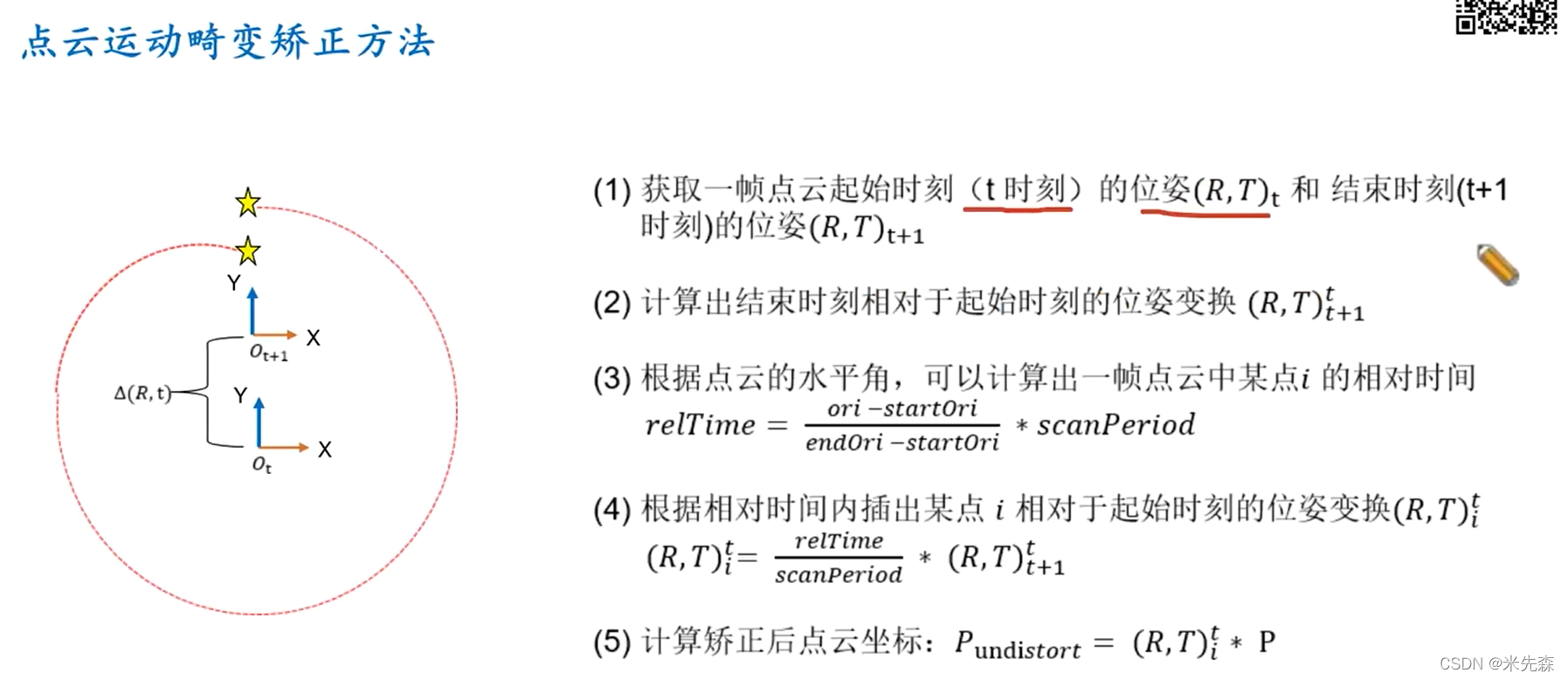
点云运动畸变矫正