
热门标签
热门文章
- 1maven项目创建可执行jar的6种方法_mvn命令构建jar包
- 2CMake与vs的配置对应(常规->附加包含目录,链接器->输入)_cmake如何对应到vs链接器输入中.lib
- 3【opencv】教程代码 —ImgProc (10)图像平滑处理
- 49. 什么是 SAP ABAP 为 Fiori 专门设计的编程模型(Programming Model)_abapfiori开发模式有哪些
- 5ChatGPT丨使用tiktoken计算tokens
- 6计算机领域国际会议分区表_sdm24是什么会议
- 7论文笔记:ShuffleNet v1_shufflenetv1论文
- 8postcss的安装与使用
- 9Could not allocate CursorWindow size due to error -12 错误解决方法
- 10incredbuild,msbuild 命令行调用实现自动化编译_incredibuild命令行
当前位置: article > 正文
mid360驱动功能包部署_mid360 imu 频率
作者:Cpp五条 | 2024-04-10 12:25:26
赞
踩
mid360 imu 频率
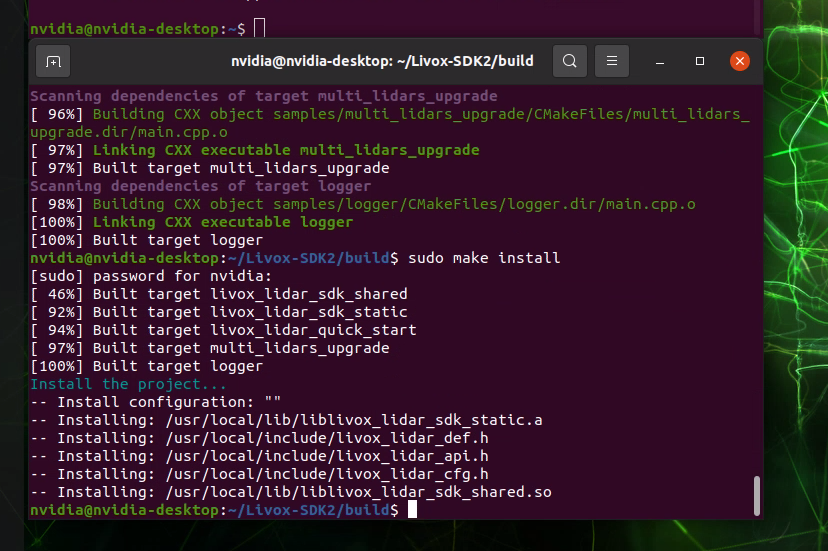
- $ git clone https://github.com/Livox-SDK/Livox-SDK2.git
- $ cd ./Livox-SDK2/
- $ mkdir build
- $ cd build
- $ cmake .. && make -j
- $ sudo make install
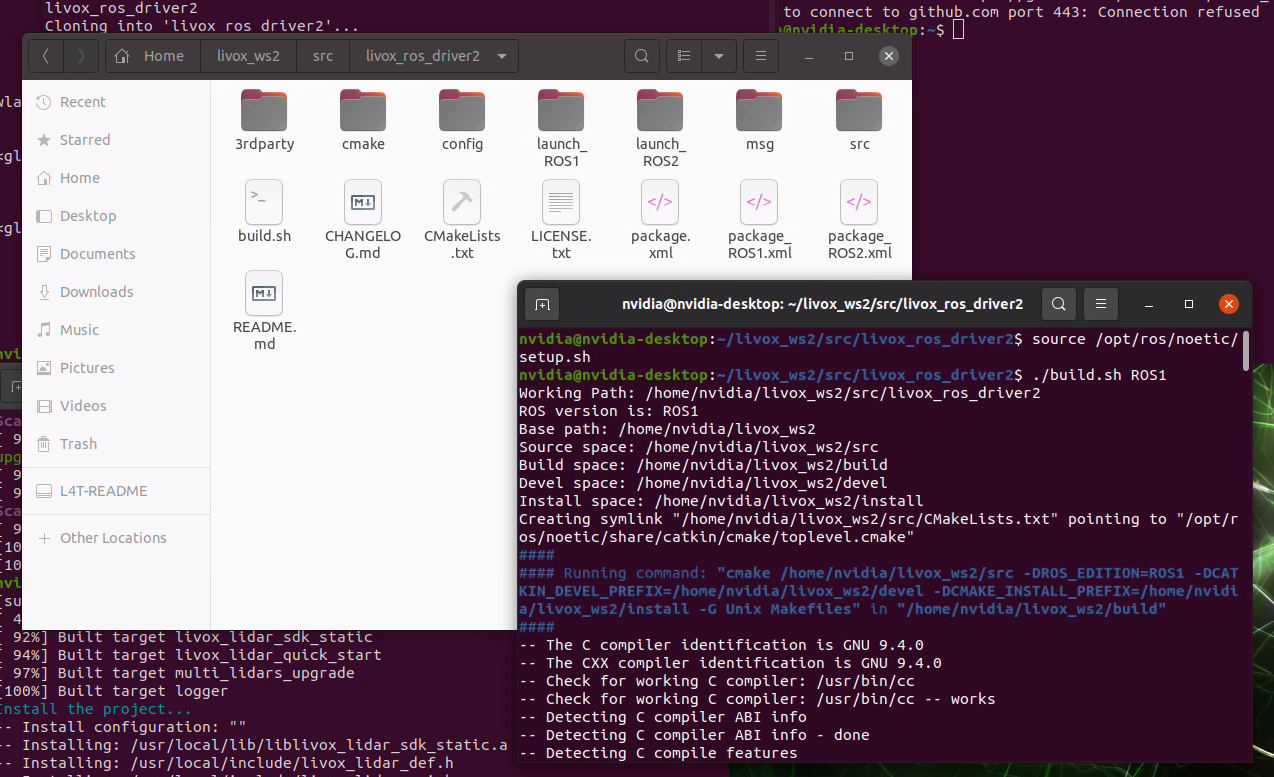
- $ git clone https://github.com/Livox-SDK/livox_ros_driver2.git livox_ws2/src/livox_ros_driver2
- $ cd livox_ws2/src/livox_ros_driver2
- $ source /opt/ros/noetic/setup.sh
- $ ./build.sh ROS1

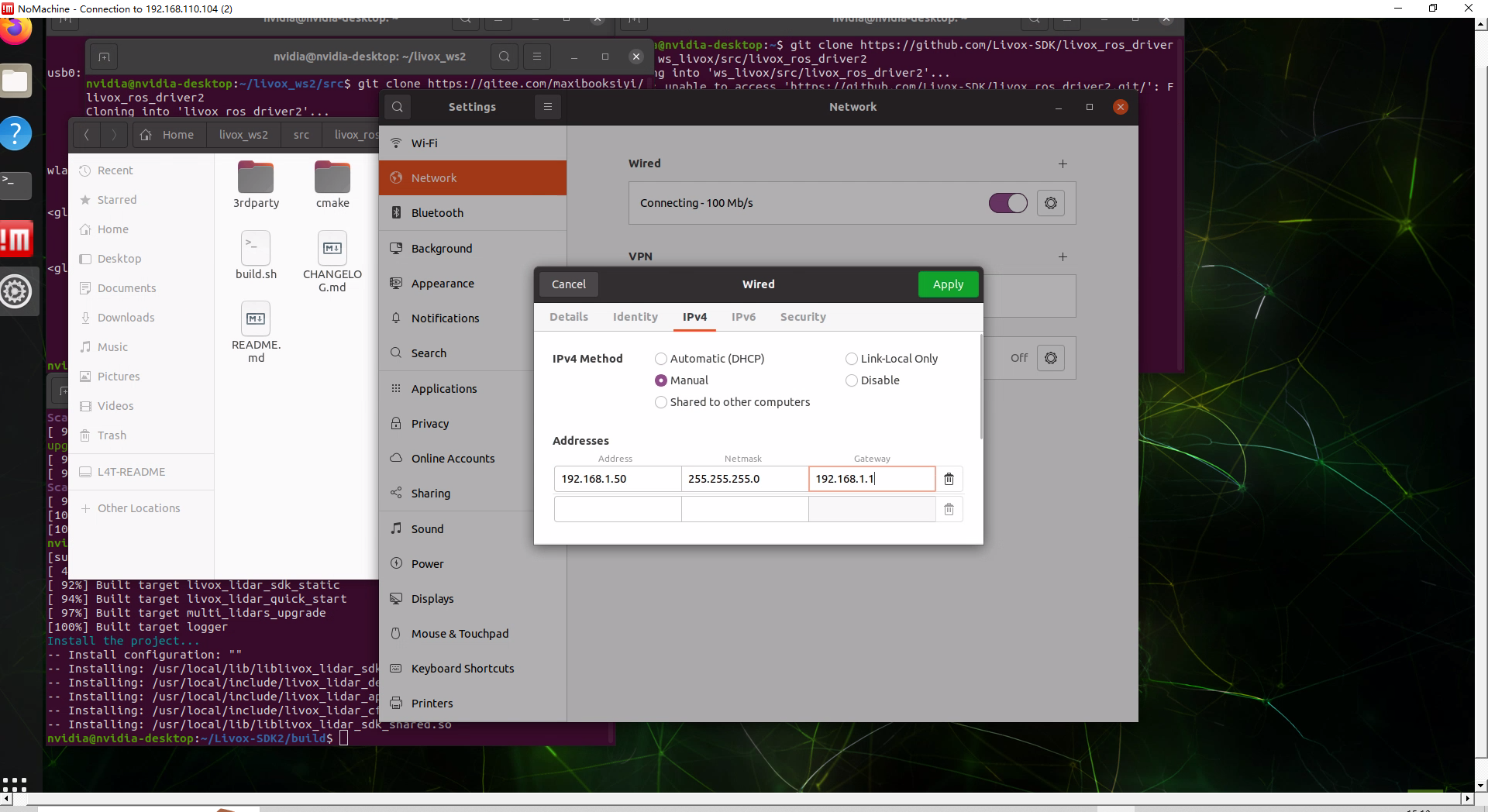
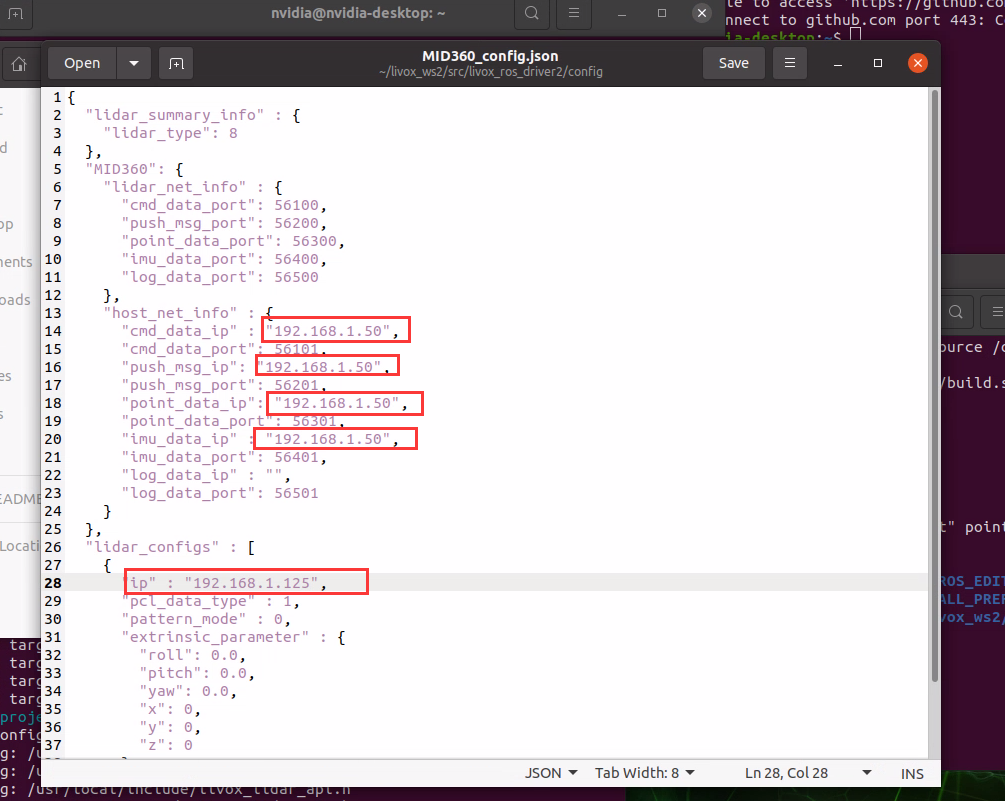
雷达的IP是192.168.1.1** 最后两位为雷达S/N码最后两位数字 mid360 iP应该是192.168.1.125
再把Ubuntu的有线IP改为静态IP,我这里改为192.168.1.50,在一个局域网内就行,可以Ping通mid360的IP就行。
ping通了!!!
改这个文件里的IP,前面几个改为Ubuntu端静态IP,最后一个改为mid360的静态IP。
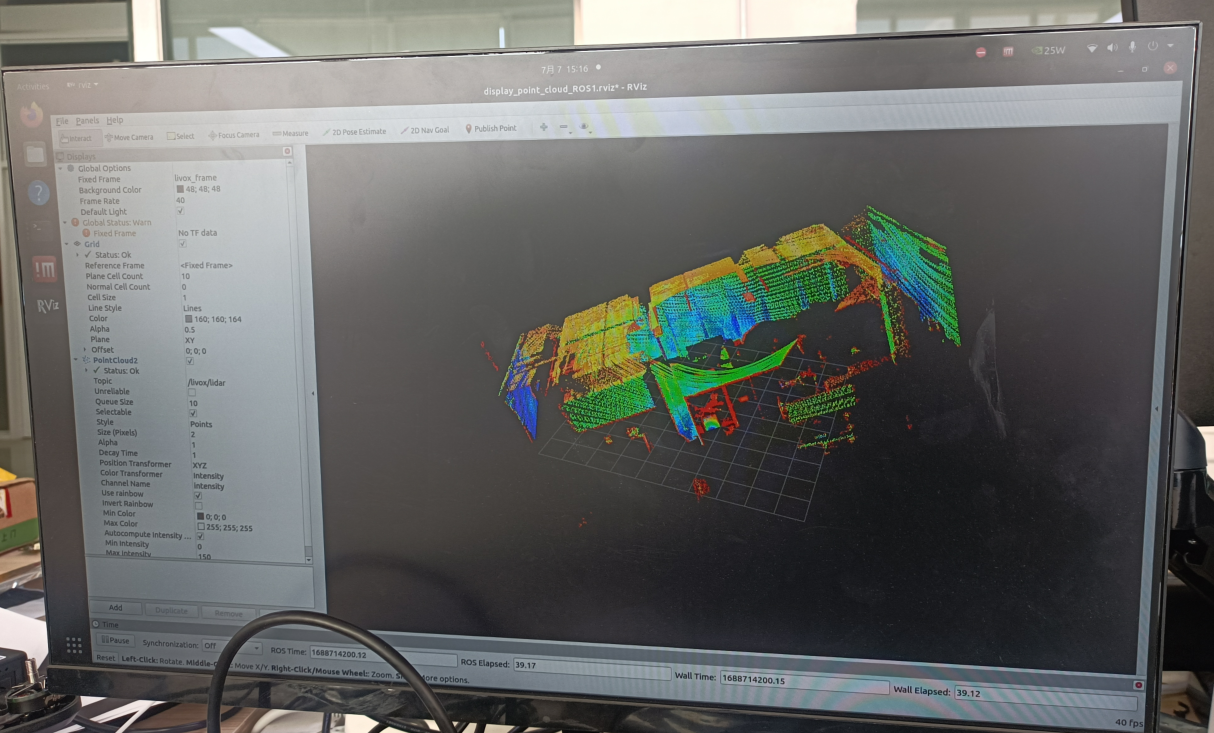
source后再起roslaunch livox_ros_driver2 rviz_MID360.launch就可以起来了
IMU话题也有值
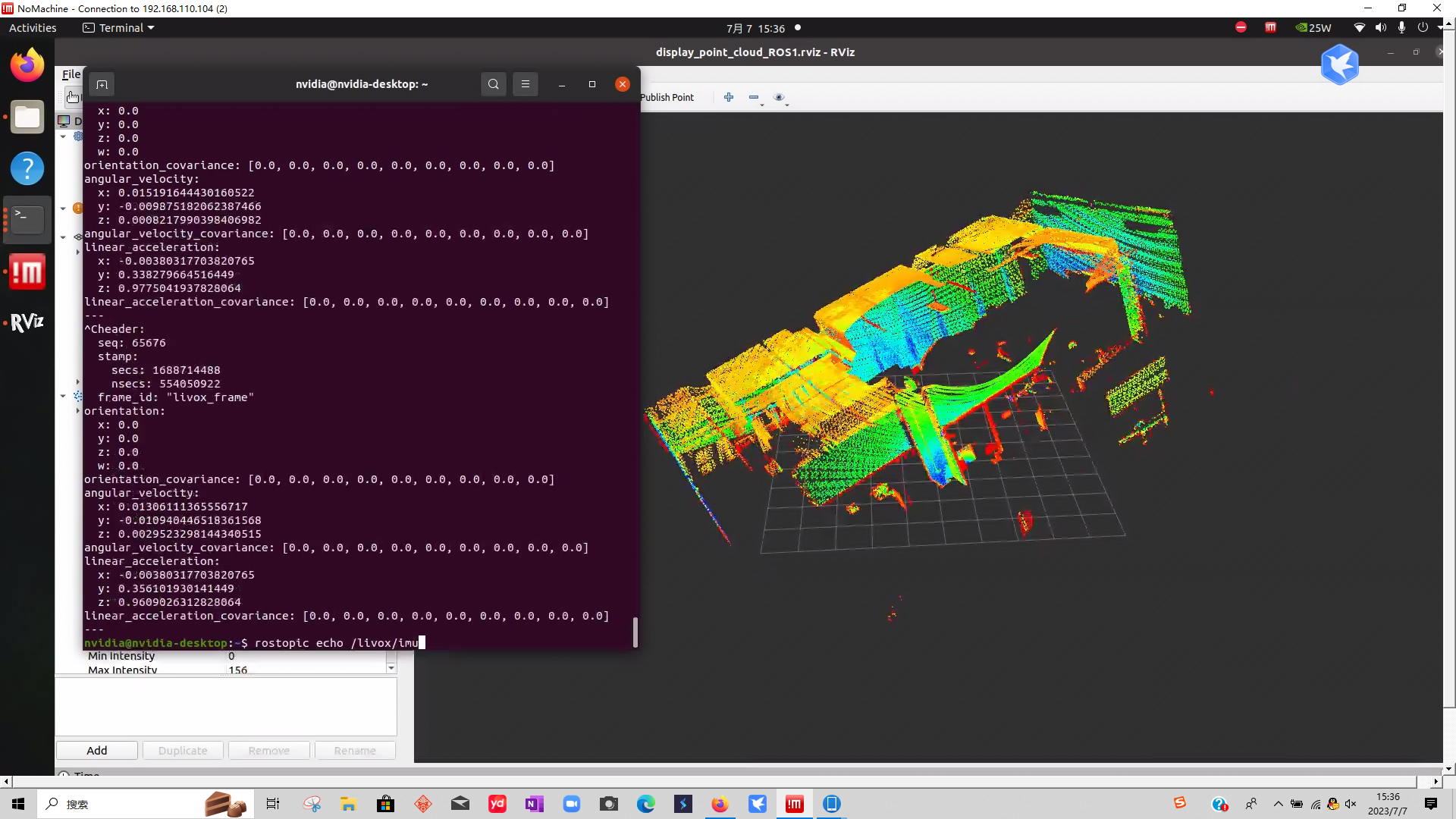
/livox/imu话题频率是200hz
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Cpp五条/article/detail/398660
推荐阅读
相关标签

