- 1STM32核心版PCB设计及总结
- 2用户,角色,权限三者的关系?让你设计用户权限系统,你会设计几张表?为什么要这样设计?_用户角色权限设计
- 3Microsoft Edge 嗯...无法访问此页面解决办法_嗯… 无法访问此页面
- 4OpenHarmony开发实战:音乐播放器(ArkTS)_arkts 音频播放器
- 5Error:java: Annotation processing is not supported for module cycles.
- 6在mac上安装好python开发环境(pyenv、pyenv-virtualenv、docker-desktop、mysql5.7),一文解决环境问题
- 7ERR_PNPM_INVALID_OVERRIDE_SELECTOR Cannot parse the “//“ selector in the o_err_pnpm_invalid_overrides_selector cannot parse
- 8无法修复的系统乱码--2020-09-15_中幕乱码2020
- 9LangChain教程 | langchain 文件加载器使用教程 | Document Loaders全集_python unstructuredworddocumentloader用法
- 10跳转(jmp)指令_jmp rax
Fanuc机器人 Karel 编程学习(二)---TP调用简单的Karel程序_karel应用
赞
踩
使用karel写一个简单的程序
硬件环境
Fanuc 6轴机器人,控制器版本V8.30P:
KAREL语言介绍
FANUC机器人除了可以通过编写TP语言程序进行控制以外,还可以通过编写KAREL语言程序进行控制。
KAREL是一种专门用于机器人系统架构的语言,用户可以在PC上创建KAREL程序,然后将其加载到机器人控制器中执行,以从系统层面激活机器人的原始功能。
与在示教器上创建的TP程序一样,用KAREL语言创建的程序也可以在机器人控制器上执行,不同的是:KAREL程序是用来构建机器人系统的,即实现系统的二次开发,而TP程序只能用于执行机器人运动和应用指令;TP程序可以在示教器上创建、编辑和执行,KAREL程序只能在PC上创建,通过编译转换后才能成为机器人可执行的程序,并且程序加载后不能示教器上编辑和修改。
FANUC机器人的KAREL语言并不是真实的KAREL语言,而是基于PASCAL语言开发出的一种高级编程语言。使用KAREL语言程序可以在机器人控制器中创建示教器显示画面,实现I/O信号的后台逻辑处理(简易PLC功能),示教机器人点位和点位数据运算,数值数据四则运算和高级运算,数据的监控、记录以及输出等功能。
需要添加的功能包
Karel (R642)
KAREL Use Sprt FCTN (J971)
如果是TP 程序调用Karel 程序,不添加 karel 功能包,也可以运行karel 程序。
如果需要设置karel 程序的运行方式,需要加载R642 和 J971 软件包。
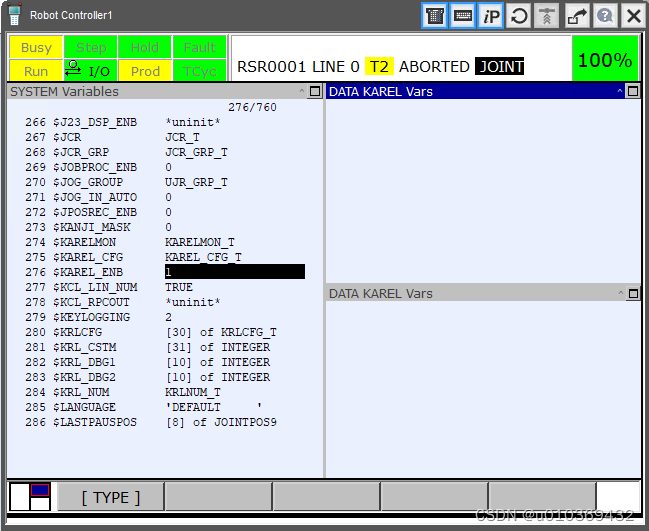
需要的设置
在menu->系统–>变量里面设置 $KAREL_ENB =1
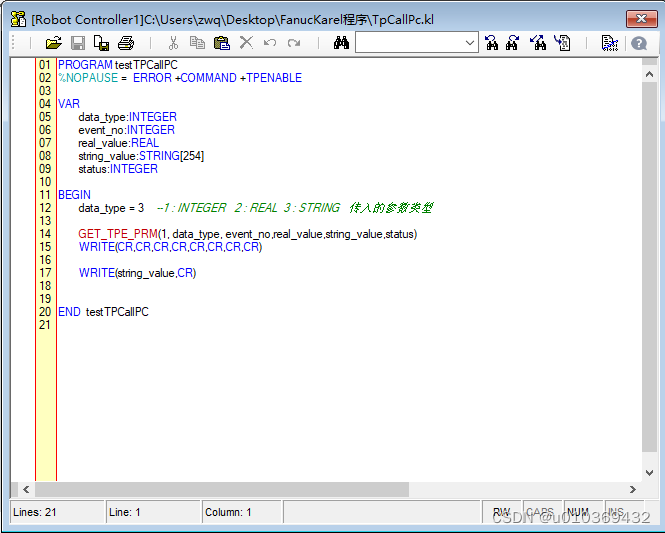
创建一个TP调用的karel 程序,并传入string参数
第一步在ROBOGUIDE里面创建karel程序
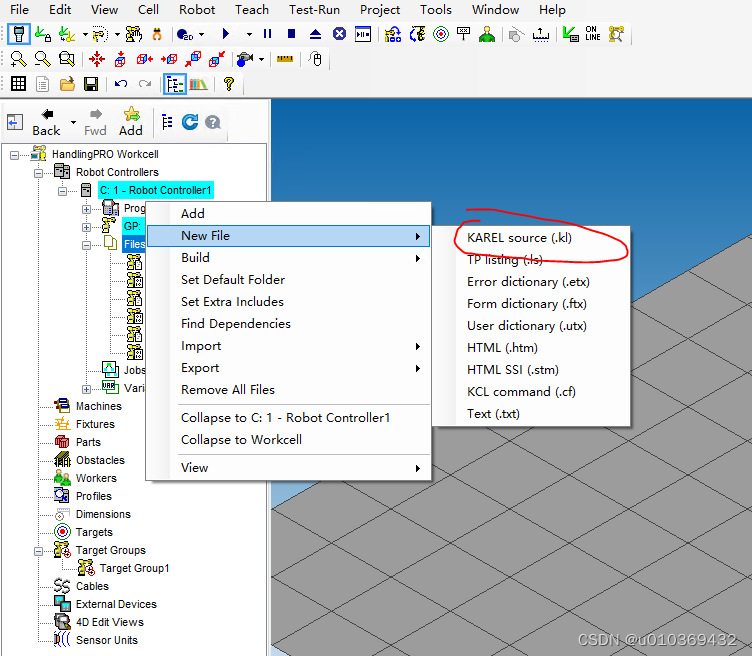
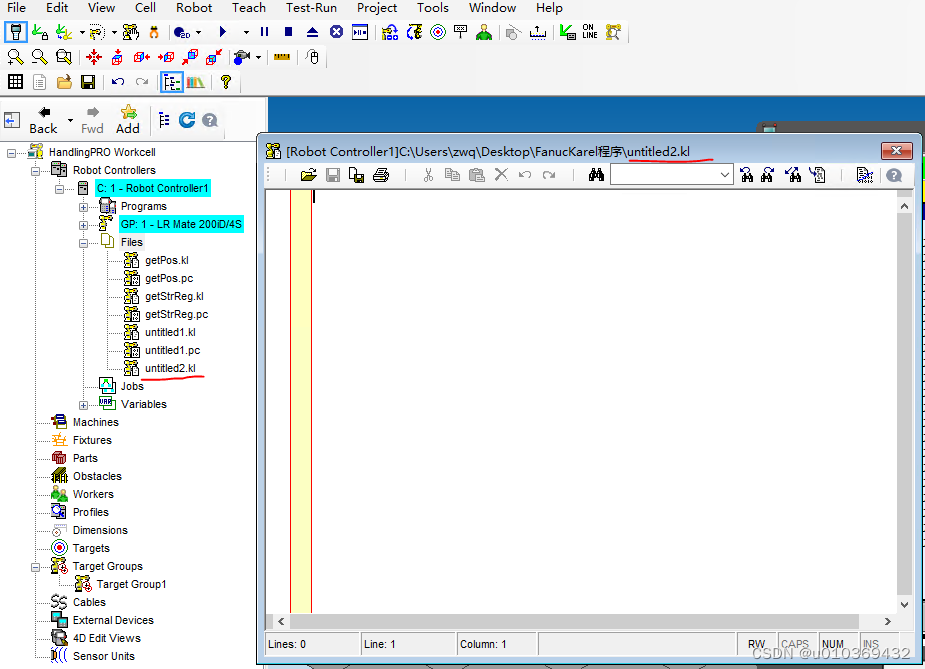
编写如下图的程序
第二步编译karel程序生成PC程序
点击创建按钮生成PC程序

第三步导入pc程序到机器人
略过
第四步使用TP程序调用PC程序测试效果
注意:测试环境是ROBOGUIDE,实体机器人也测过是可以运行的,创建Cell需要注意虚拟机器人和实体机器人的软件版本需要一样否则导入PC程序时候会提示创建PC程序的版本和控制器版本不一样。
测试前设置

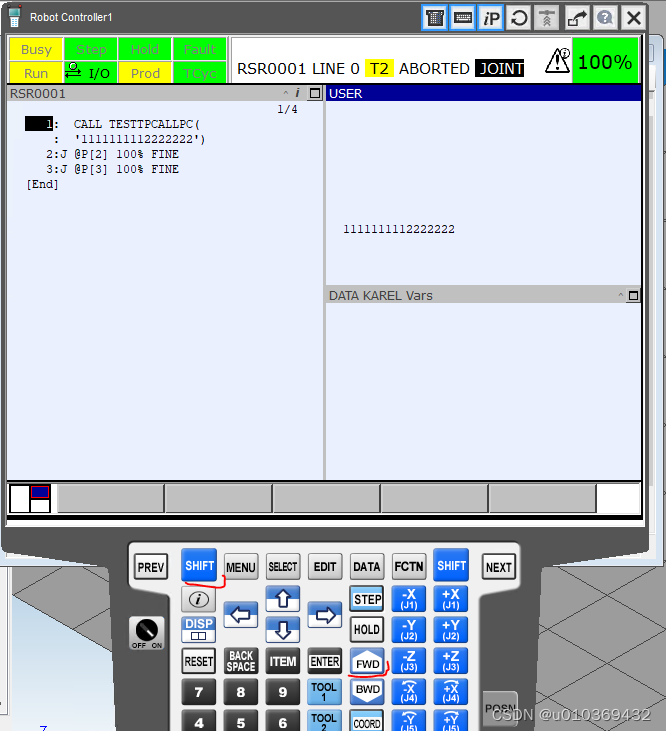
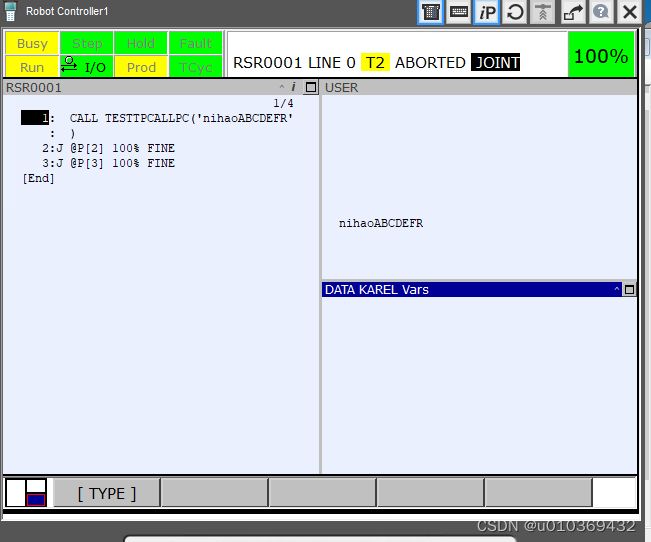
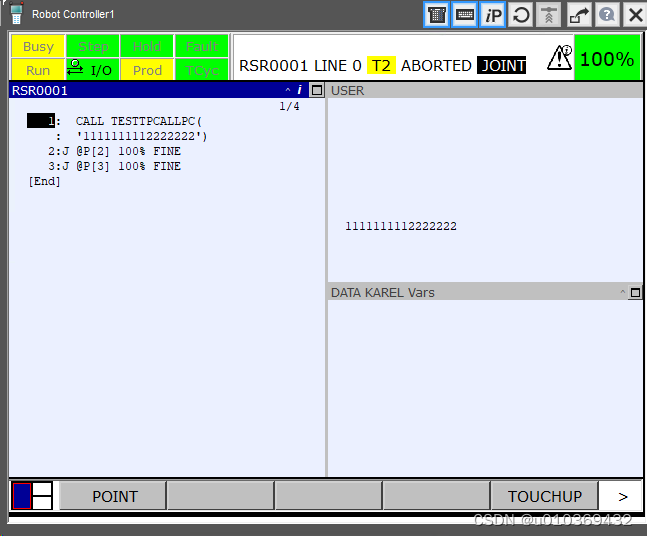
新建一个程序RSR0001 并且调用我们导入的TestTPCALLPC程序,并且同时显示程序编辑界面和user界面

按住shift +FWD 执行程序