
热门标签
热门文章
- 1修改rabbitmq的连接端口_rabbitmq修改端口
- 2微服务治理:Nacos, Zookeeper, consul, etcd, Eureka等 5 个常用微服务注册工具对比_etcd和nacos
- 3angular入门_angular安装
- 4STM32cubeMX 基于stm32的定时器实现定时1秒LED闪烁。_stm32cubemx 定时器
- 5统一身份认证(SSO/AD域/LDAP)_ldap统一用户认证和单点登录
- 6Common Trace Format
- 7计算机毕业设计:基于python天气数据爬虫可视化系统+气象数据+Django框架(源码)✅
- 8【Python】—— 文本分析_文本分析代码
- 9电子班牌系统服务器,电子班牌管理系统
- 10开源vs闭源大模型如何塑造技术的未来?开源模型的优劣势&未来发展方向_开源模型和闭源模型
当前位置: article > 正文
【ROS2机器人入门到实战】你的第一个MicroROS节点_mirco ros2
作者:Cpp五条 | 2024-05-16 21:57:45
赞
踩
mirco ros2
2.你的第一个MicroROS节点
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
你好,我是爱吃鱼香ROS的小鱼。上一节我们介绍了MicroROS和Agent的安装,本节我们开始正是编写代码,接入ROS2。
一、新建工程添加依赖
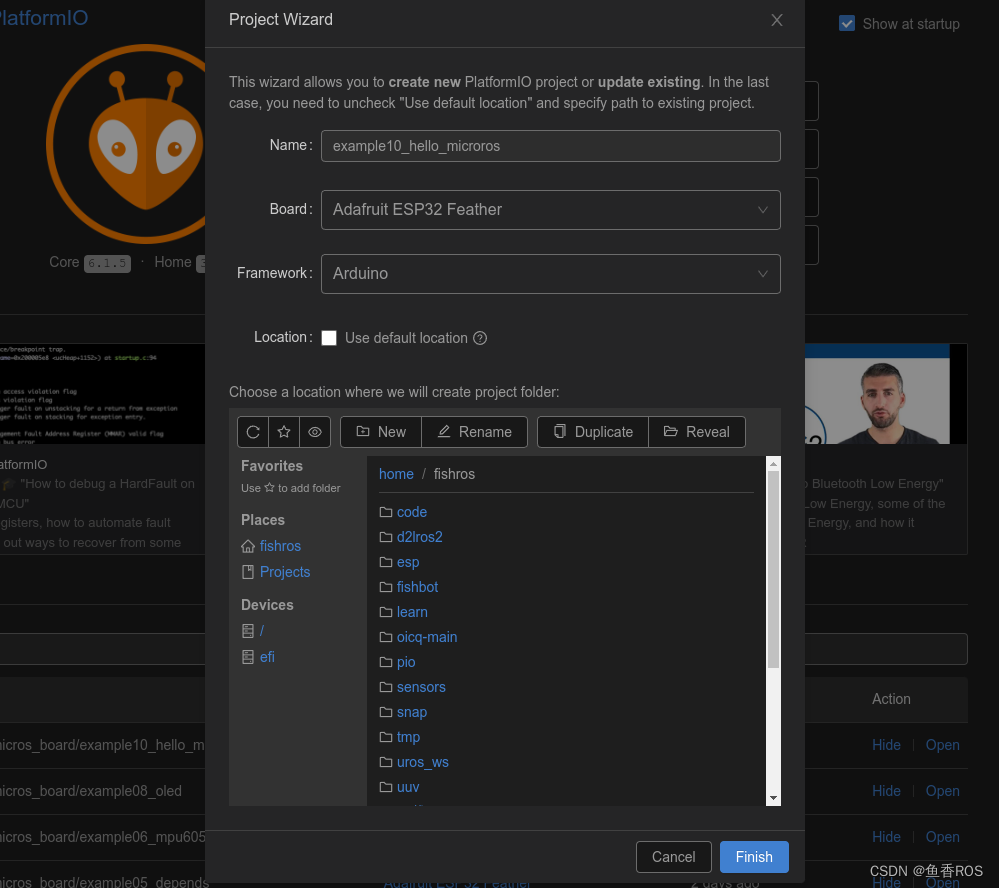
1.1 新建工程
新建example10_hello_microros工程,这里需要更改下工程的位置,默认目录是在文档目录下,小鱼在测试时发现目录定位上有bug,所以建议建议直接放到主目录或其下目录,小鱼这里直接放到主目录。
1.2 添加依赖
打开platform.ini,接着我们添加MicroROS的依赖。
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
- 1
- 2
- 3
- 4
- 5
- 6
这里使用的地址并不是MicroROS官方仓库,而是小鱼经过修改后的国内仓库地址,里面放置了小鱼编译好后可以直接使用的microros静态库,并对仓库中需要梯子的地址进行了替换。
二、编写代码-第一个节点
开始编写代码,因为Micro-ROS遵循RCLC-API,所以这里小鱼通过一个最简单的例程介绍如何新建一个节点。
#include <Arduino.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> rclc_executor_t executor; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; void setup() { Serial.begin(115200); // 设置通过串口进行MicroROS通信 set_microros_serial_transports(Serial); // 延时时一段时间,等待设置完成 delay(2000); // 初始化内存分配器 allocator = rcl_get_default_allocator(); // 创建初始化选项 rclc_support_init(&support, 0, NULL, &allocator); // 创建节点 hello_microros rclc_node_init_default(&node, "hello_microros", "", &support); // 创建执行器 rclc_executor_init(&executor, &support.context, 1, &allocator); } void loop() { delay(100); // 循环处理数据 rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
上面代码并不复杂,小鱼已经将注释写上,强烈建议你跟着代码敲一遍,不要直接复制粘贴。
相比在上位机中开发ROS,这里多了几步
- 设置通信协议,因为可以通过多种方式连接,所以需要进行提前设置
- 初始化内存分配器,在微控制器上资源受限,内存的管理要很细致
- 创建初始化选项,用于初始化rcl并创建一些需要用到的数据结构体
关于rclc的api小鱼并没有找到文档,不过源码的头文件依然非常清晰,直接安装Ctrl点击某个函数即可跳转(不行的,重启下Vscode)。
比如关于rclc_support_init 的源码及参数介绍。
/** * Initializes rcl and creates some support data structures. * Initializes clock as RCL_STEADY_TIME. * * <hr> * Attribute | Adherence * ------------------ | ------------- * Allocates Memory | Yes (in RCL) * Thread-Safe | No * Uses Atomics | No * Lock-Free | Yes * * \param[inout] support a zero-initialized rclc_support_t * \param[in] argc number of args of main * \param[in] argv array of arguments of main * \param[in] allocator allocator for allocating memory * \return `RCL_RET_OK` if RCL was initialized successfully * \return `RCL_RET_INVALID_ARGUMENT` if any null pointer as argument * \return `RCL_RET_ERROR` in case of failure */ RCLC_PUBLIC rcl_ret_t rclc_support_init( rclc_support_t * support, int argc, char const * const * argv, rcl_allocator_t * allocator);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
三、运行测试
连接开发板,编译下载,如果遇到端口被占用,多半是你的microros_agent没有关闭,Ctrl+C打断运行再次尝试。
接着打开Agent
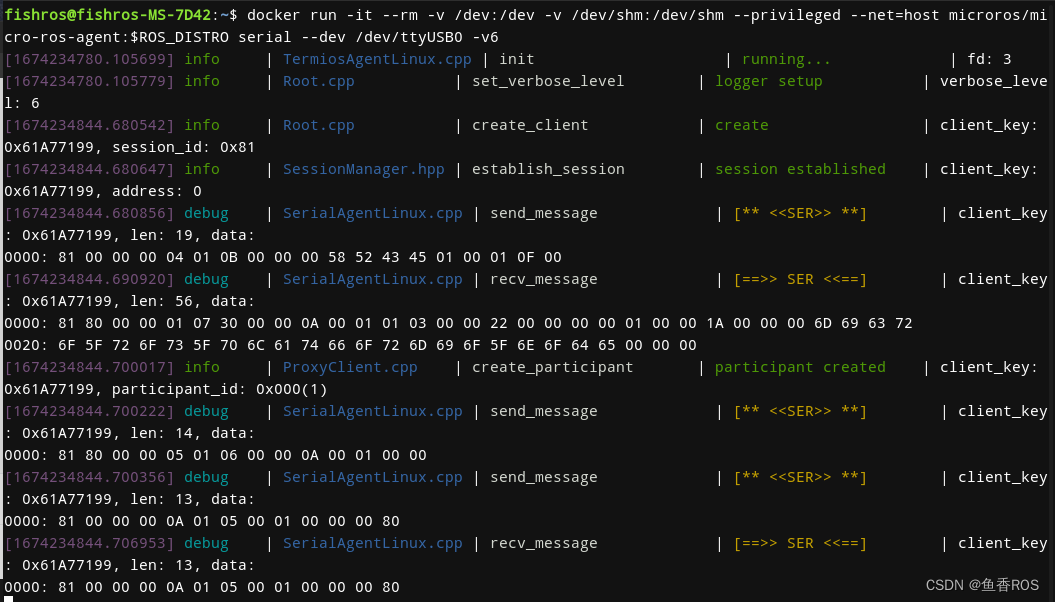
然而并没有什么反应,重新点击一次RST即可看到有数据发送和接收过来了。
接着打开新的终端,输入指令
ros2 node list
ros2 node info /hello_microros
- 1
- 2
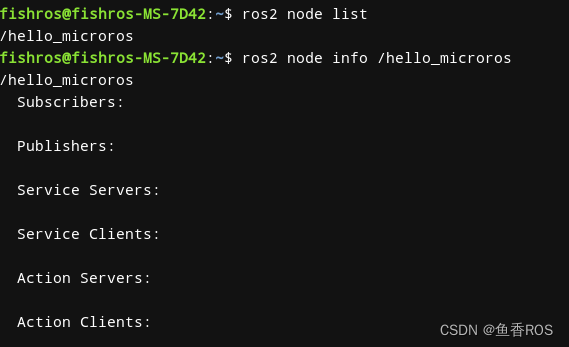
可以看到,我们的第一个节点成功运行起来了。
四、总结
本节我们成功的在微控制器平台上将MicroROS节点运行起来了,下一节我们开始正式进行ROS2通信的学习。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Cpp五条/article/detail/580656
推荐阅读
相关标签

