
- 1VSCode配置LeetCode(C++环境配置)简述_vscode leetcode c++
- 2【Gitee的使用】Gitee的简单使用,查看/创建SSH公匙、创建版本库、拉取代码、提交代码_gitee ssh
- 3动态规划之子序列以及子数组类型的问题_划分多个子数组是哪种动态规划
- 4python依赖包安装 pip换源_python安装换源
- 5统计一批学生的平均成绩和不及格人数_c语言统计不及格人数
- 6Flask框架学习之环境配置_flask对应的python版本
- 7Python+Django+Mysql开发简单在线音乐推荐系统 基于用户的协同过滤推荐算法 音乐播放推荐系统 个性化音乐推荐系统 可视化数据分析 爬虫 机器学习 人工智能_python个性化音乐推荐系统使用什么算法
- 8【论文阅读+复现】AniPortrait: Audio-Driven Synthesis of Photorealistic Portrait Animation
- 9Zynq7020-PS端裸机--EMMC/SD驱动实现_zynq7020 emmc硬件设计
- 10Spring Boot构建RESTful API与单元测试,你真的知道软件测试按下开机键到启动发生什么吗
51单片机 - 红外遥控NEC协议_c51 红外遥控
赞
踩
1> 实验概述
通过红外遥控器,控制DAYi(51开发板),开/关灯等,并将按键信息通过串口,发送到PC端;
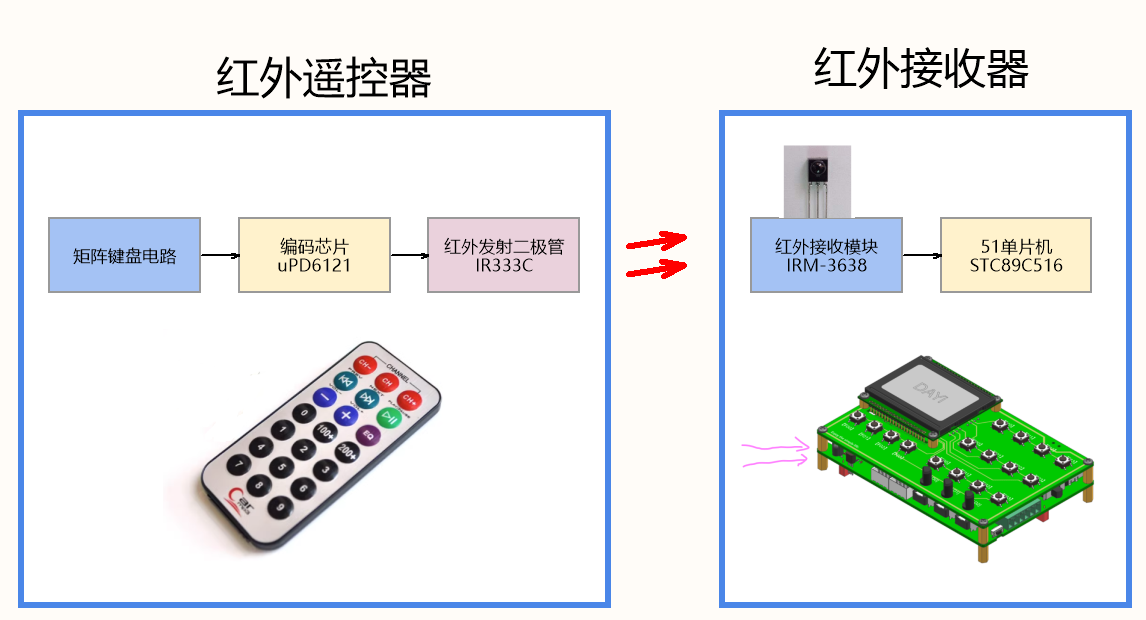


2> 红外遥控器
2.1> 长啥样?

DAYi开发板用的是第1种编码;
2.2> 咋干的?

以upd6121为例:内部框图

参考原理图:
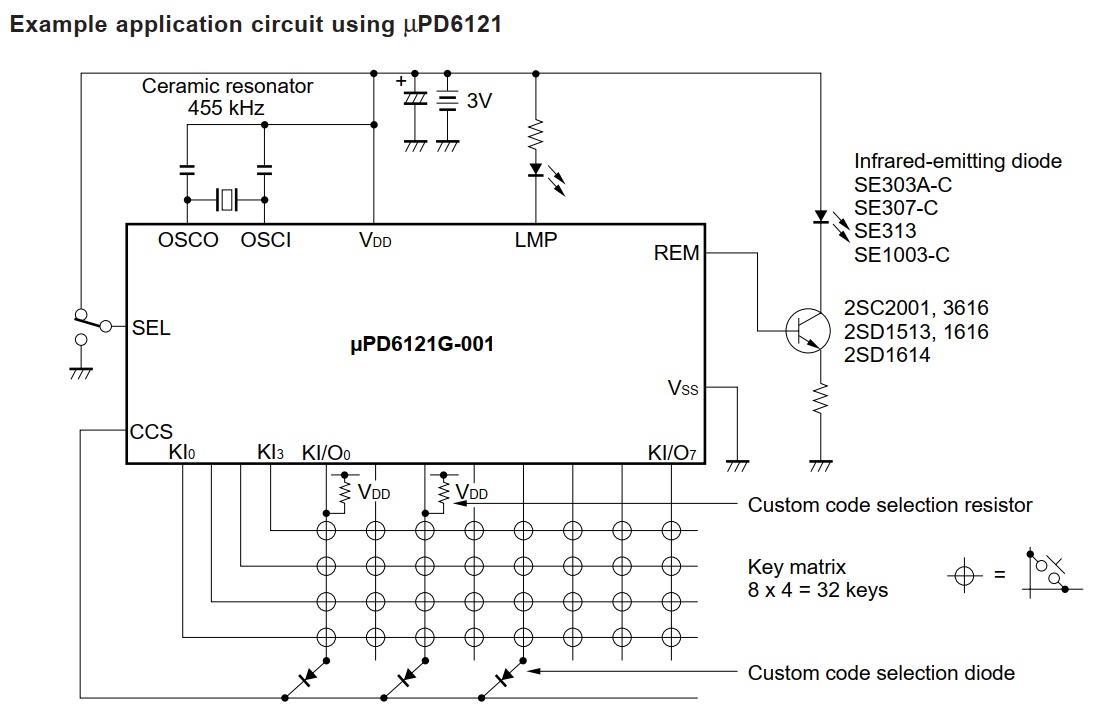
工作原理:
Step 1> 扫描键盘键盘,得到按键编码值;
Step 2> 然后,用内部产生的38KHz的载波,按照【NEC红外传输协议】键值等信息调制;
Step 3> 最后通过红外发射二极管发射出去;
3> NEC红外传输协议
3.1> 6部分构成
6部分构成:
1> 引导码;
2> 客户码; 3> 客户码反码;
4> 数据码; 5> 数据码反码;
6>结束位;
客户码,数据码, 由8bit数据组成, 先发送LSB(最低有效位);

时间参数:

举栗子:

重复码波形:

3.2> 引导码

38KHz载波保持9ms, 低电平4.5ms;
9ms = 9000us;
9000us / 26.3 ≈ 342个载波周期;
3.3> 38KHz载波长啥样?

3.4> 咋表示 0 / 1

通过载波间隔不同表示 0 或 1;
0: 低电平0.565ms; 565us;
1: 低电平1.69ms; 1690us;
载波都是保持0.56ms = 560us;
560us / 26.3us = 21个载波周期;
4> 红外接收
4.1> 硬件电路

4.2> IRM-3638T内部框图


一体式红外接收头,内部包含载波解调等功能,输出方波,非常方便了使用;
这1个大洋花的值;
4.3> IRM-3638T解调波形

输入波形的38KHz载波解调为:低电平;
输入波形的低电平反向输出为:高电平;
引导码解调波形:

5> 程序设计
5.1> 编程思路
实测IRM-3638T解调波形:
#include "bsp.h" uchar8_t ir_code[4]; uchar8_t ir_over_f = 0x00; void IR_Init(void) { IR_RX = 1; // 初始化红外接收端口 IT0 = 1; // 外部中断0,下降沿触发 EX0 = 1; // 使能外部中断0 EA = 1; // 打开总中断 } uchar8_t IR_Read_Byte(void) { uchar8_t i = 0; uchar8_t time_lim = 0; //超时检测 uchar8_t ret; for (i = 0; i < 8; i++) { //Step 1>处理低电平 time_lim = 0; while ((IR_RX == 0) && (time_lim < 7)) { Delay100us(); time_lim++; } //Step 2>高电平计时 // 0: 570us; // 1: 1700us; time_lim = 0; while ((IR_RX == 1) && (time_lim < 19)) { Delay100us(); time_lim++; } //Step 3> 根据高电平时间,读出数据0/1 ret = ret >> 1; if (time_lim <= 7) { ret = ret & 0x7F; } else if (time_lim > 7) { ret = ret | 0x80; } } return ret; } void IR_handle() interrupt 0 { uchar8_t i = 0; //4字节数据 uchar8_t time_lim = 0; //超时检测 ir_over_f = 0; //Step 1> 判断引导码 9ms低电平 time_lim = 0; while ((IR_RX == 0) && (time_lim < 90)) { Delay100us(); time_lim++; } // 排除干扰信号 if (time_lim < 80) { return; } //Step 2> 判断引导码 4.5ms高电平 time_lim = 0; while ((IR_RX == 1) && (time_lim < 50)) { Delay100us(); time_lim++; } // 排除重复码Repeat if (time_lim < 40) { return; } for (i = 0; i < 4; i++) { ir_code[i] = IR_Read_Byte(); } ir_over_f = 1; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
程序存在问题:
1> 全在中断中处理,占用时间太长;
6> 逻辑分析仪-测试波形
注意:
逻辑分析仪采样率设置为 80MHz;
6.1> 整体波形

1> 引导码:低电平9ms,高电平4.5ms;
2> 客户码: 0x00;
3> 客户码反码: 0xFF;
4> 数据码:0x08;
5> 数据码反码:0xF7;
一帧数据,大约68ms;
发现:有38KHz载波经过红外接收管解调后,都变成了低电平;
没有38KHz的都是高电平;
6.2> 38KHz载波波形

实测:
周期:26.4us
频率:37.87KHz
高电平:2.7us
低电平:23.7us
测量有一定误差,与理想波形基本一样
6.3> 数据“0”波形

6.3> 数据“1”波形

6.4> 重复码

7> 视频链接
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

