
- 1python教学网站免费,python自学平台_realpython官网花钱吗
- 2文心一言 4.0 ERNIE-Bot 4.0 :ERNIE-Bot 4.0 大模型深度测试体验报告_文心大模型4.0版本下载
- 3FPGA-VGA显示图像_基于fpga的vga显示设计方案
- 4网络数据包在链路层、网络层转发过程(转发)_ping链路中数据包发送流程
- 5【嵌入式】基于STC89C52RC的51单片机学习(一)_stc89c52rc单片机io接口和vccio接口区别
- 6主题:non-fast-forward 错误提示
- 7Java计算时间差、日期差总结_java算时间差
- 8【IOS】testfilght邀请流程_testflight邀请码
- 9ssh设置别名 ,登录_ssh 别名登录
- 10矩阵的相似性度量的常用方法_矩阵相似度
无人机辅助移动边缘计算的计算卸载优化:一种深度确定性策略梯度方法(6)——代码实现_多无人机边缘计算卸载代码
赞
踩
无人机辅助移动边缘计算的计算卸载优化:一种深度确定性策略梯度方法(6)——代码实现
参考连接:
[1] Wang Y , Fang W , Ding Y , et al. Computation offloading optimization for UAV-assisted mobile edge computing: a deep deterministic policy gradient approach[J]. Wireless Networks, 2021:1-16.doi:https://doi.org/10.1007/s11276-021-02632-z
https://morvanzhou.github.io/tutorials/
https://github.com/fangvv/UAV-DDPG/blob/main/DDPG/DDPG_without_behavior_noise/ddpg_algo.py
https://blog.csdn.net/weixin_43835470/article/details/120881273
6 代码实现
本部分主要包括 Actor Critc,DDPG,DQN,Edge_only,Local_only 算法的基本实现思路,具体细节不予展示。
6.1 问题环境
问题环境主要包括了环境的各种状态 s 、无人机 uav 相关参数、用户 ue 相关参数和一些影响变量。其主要功能是模拟整个实验环境。主要动作包括了无人机飞行、无人机运算、用户移动和用户本地运算。
6.1.1 参数设计
参数包括了场地大小,无人机位置,带宽,噪声功率等参数,包括模拟实验中的所有参数。
#################### uav #################### height = ground_length = ground_width = 100 # 场地长宽均为100m,UAV飞行高度也是 sum_task_size = 60 * 1048576 # 总计算任务60 Mbits loc_uav = [50, 50] #无人机的初始位置 bandwidth_nums = 1 # 1MHz = 10^6Hz B = bandwidth_nums * 10 ** 6 # 带宽1MHz p_noisy_los = 10 ** (-13) # 噪声功率-100dBm **** p_noisy_nlos = 10 ** (-11) # 噪声功率-80dBm **** flight_speed = 50. # 飞行速度50m/s f_ue = 6e8 # UE的计算频率0.6GHz f_uav = 12e8 # UAV的计算频率1.2GHz r = 10 ** (-27) # 芯片结构对cpu处理的影响因子 s = 1000 # 单位bit处理所需cpu圈数1000 p_uplink = 0.1 # 上行链路传输功率0.1W # alpha0 = -30 # 距离为1m时的参考信道增益-30dB alpha0 = 1e-5 # 距离为1m时的参考信道增益-50dB = 1e-5 **** T = 200 # 周期200s delta_t = 5 # 1s飞行, 后4s用于悬停计算 slot_num = int(T / delta_t) # 40个间隔 m_uav = 9.65 # uav质量/kg e_battery_uav = 500000 # uav电池电量: 500kJ. ref: Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning #################### ues #################### M = 4 # UE数量 block_flag_list = np.random.randint(0, 2, M) # 4个ue,ue的遮挡情况 loc_ue_list = np.random.randint(0, 101, size=[M, 2]) # 位置信息:x在0-100随机 # task_list = np.random.randint(1048576, 2097153, M) # 随机计算任务1~2Mbits task_list = np.random.randint(1572864, 2097153, M) # 随机计算任务1.5~2Mbits # ue位置转移概率 # 0:位置不变; 1:x+1,y; 2:x,y+1; 3:x-1,y; 4:x,y-1 # 60%概率原地不动,10%概率向上下左右 loc_ue_trans_pro = np.array([[.6, .1, .1, .1, .1], [.6, .1, .1, .1, .1], [.6, .1, .1, .1, .1], [.6, .1, .1, .1, .1]]) action_bound = [-1, 1] # 对应tahn激活函数 action_dim = 4 # 第一位表示服务的ue id;中间两位表示飞行角度和距离;后1位表示目前服务于UE的卸载率 state_dim = 4 + M * 4 # uav 剩余电量, uav 位置, 剩余总任务大小, 所有ue 位置, 所有ue 任务大小, 所有ue 遮挡情况

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
6.1.2 初始化部分
初始化包括 uav 剩余电量, uav 位置, 剩余总任务大小, 所有 ue 位置, 所有 ue 任务大小, 所有 ue 遮挡情况。
def __init__(self): ''' 初始化环境 包括uav 剩余电量, uav 位置, 剩余总任务大小, 所有ue 位置, 所有ue 任务大小, 所有ue 遮挡情况 Returns ------- None. ''' # uav battery remain, uav loc, remaining sum task size, all ue loc, all ue task size, all ue block_flag self.start_state = np.append(self.e_battery_uav, self.loc_uav) self.start_state = np.append(self.start_state, self.sum_task_size) self.start_state = np.append(self.start_state, np.ravel(self.loc_ue_list)) self.start_state = np.append(self.start_state, self.task_list) self.start_state = np.append(self.start_state, self.block_flag_list) self.state = self.start_state
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
6.1.3 重置
由于实验是划分时间段进行的,涉及到每个步骤执行后的重置。
def reset(self): ''' 重置环境 Returns ------- 所有的环境信息 ''' self.reset_env() # uav battery remain, uav loc, remaining sum task size, all ue loc, all ue task size, all ue block_flag self.state = np.append(self.e_battery_uav, self.loc_uav) self.state = np.append(self.state, self.sum_task_size) self.state = np.append(self.state, np.ravel(self.loc_ue_list)) self.state = np.append(self.state, self.task_list) self.state = np.append(self.state, self.block_flag_list) return self._get_obs() def reset_env(self): ''' 将所有的值设置为默认值 Returns ------- None. ''' self.sum_task_size = 100 * 1048576 # 总计算任务60 Mbits self.e_battery_uav = 500000 # uav电池电量: 500kJ self.loc_uav = [50, 50] self.loc_ue_list = np.random.randint(0, 101, size=[self.M, 2]) # 位置信息:x在0-100随机 self.reset_step() def reset_step(self): ''' 随机初始化ue 的计算任务和遮挡情况 Returns ------- None. ''' self.task_list = np.random.randint(2621440, 3145729, self.M) # 随机计算任务1.5~2Mbits -> 1.5~2 2~2.5 2.5~3 3~3.5 3.5~4 self.block_flag_list = np.random.randint(0, 2, self.M) # 4个ue,ue的遮挡情况
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
6.1.4 每段时间动作
在每个时间片段中进行的动作包括了选择用户,无人机飞行,计算任务,算出最大处理时延几个部分。
选择用户的时候可以随机选择用户,也可以类似DQN中根据对应的动作选择用户。
无人机飞行时需要计算飞行后的位置以及飞行时的能量消耗。
计算任务的时候需要考虑特殊情况,如计算任务已经完成,那么实验立刻终止,不进行后续步骤;最后一步的计算任务总量与我们规定的总任务量不一致,那么重置任务大小使其满足总计算任务量;无人机飞行时飞出场地,需要重新进行该步然后进行惩罚;以及无人机的电量不足以飞行或者计算,那么就将无人机所有电量都用完后,再进行下一片段。
计算最大处理时延后需要更新我们的奖惩,同时考虑用户移动。
def step(self): # 0: 选择服务的ue编号 ; 1: 方向theta; 2: 距离d; 3: offloading ratio step_redo = False #是否重做该步 is_terminal = False #是否终止 ue_id = np.random.randint(0, self.M) #随机选择一个用户 theta = 0 # 角度 offloading_ratio = 0 # ue卸载率 task_size = self.task_list[ue_id] #获取该用户的计算任务 block_flag = self.block_flag_list[ue_id] #获取该用户的遮挡情况 # 飞行距离 dis_fly = 0 # 1s飞行距离 # 飞行能耗 # delta_t:5s(1s飞行,4s计算) m_uav:uav质量 e_fly = (dis_fly / (self.delta_t * 0.5)) ** 2 * self.m_uav * ( self.delta_t * 0.5) * 0.5 # ref: Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning # ref:通过无人机装载的云计算的移动边缘计算:位分配和路径规划的优化 # UAV飞行后的位置 dx_uav = dis_fly * math.cos(theta) dy_uav = dis_fly * math.sin(theta) loc_uav_after_fly_x = self.loc_uav[0] + dx_uav loc_uav_after_fly_y = self.loc_uav[1] + dy_uav # 服务器计算耗能 # f_uav:UAV的计算频率 s:单位bit处理所需cpu圈数 t_server = offloading_ratio * task_size / (self.f_uav / self.s) # 在UAV边缘服务器上计算时延 # r:芯片结构对cpu处理的影响因子 e_server = self.r * self.f_uav ** 3 * t_server # 在UAV边缘服务器上计算耗能 # 计算任务全部完成 if self.sum_task_size == 0: is_terminal = True # file_name = 'output.txt' # with open(file_name, 'a') as file_obj: # file_obj.write("\n======== This episode is done ========") # 本episode结束 reward = 0 # 最后一步计算任务和ue的计算任务不匹配 elif self.sum_task_size - self.task_list[ue_id] < 0: # 将最后一步计算任务改成总计算任务的剩余量 self.task_list = np.ones(self.M) * self.sum_task_size reward = 0 step_redo = True # uav位置不对 elif loc_uav_after_fly_x < 0 or loc_uav_after_fly_x > self.ground_width \ or loc_uav_after_fly_y < 0 or loc_uav_after_fly_y > self.ground_length: reward = -100 step_redo = True # uav电量不能支持飞行 elif self.e_battery_uav < e_fly: reward = -100 # uav电量不能支持计算 elif self.e_battery_uav - e_fly < e_server: reward = -100 # 电量支持飞行,且计算任务合理,且计算任务能在剩余电量内计算 else: delay = self.com_delay(self.loc_ue_list[ue_id], np.array([loc_uav_after_fly_x, loc_uav_after_fly_y]), offloading_ratio, task_size, block_flag) # 计算delay reward = delay #reward设置为时延 # 更新下一时刻状态 self.e_battery_uav = self.e_battery_uav - e_fly - e_server # uav 剩余电量 self.sum_task_size -= self.task_list[ue_id] # 剩余任务量 for i in range(self.M): # ue随机移动 tmp = np.random.rand() if 0.6 < tmp <= 0.7: self.loc_ue_list[i] += [0, 1] elif 0.7 < tmp <= 0.8: self.loc_ue_list[i] += [1, 0] elif 0.8 < tmp <= 0.9: self.loc_ue_list[i] += [0, -1] elif 0.9 < tmp <= 1: self.loc_ue_list[i] += [-1, 0] else: self.loc_ue_list[i] += [0, 0] # np.clip是一个截取函数,用于截取数组中小于或者大于某值的部分,并使得被截取部分等于固定值。 # np.clip(a, a_min, a_max, out=None): # a:输入矩阵;a_min:被限定的最小值,所有比a_min小的数都会强制变为a_min; # a_max:被限定的最大值,所有比a_max大的数都会强制变为a_max;out:可以指定输出矩阵的对象,shape与a相同 # 限定了用户的位置 np.clip(self.loc_ue_list[i], 0, 100) # self.task_list = np.random.randint(1048576, 2097153, self.M) # ue随机计算任务1~2Mbits # 随机初始化ue 的计算任务和遮挡情况 self.reset_step() return reward, is_terminal, step_redo
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
6.1.5 计算最大处理时延
根据用户位置,无人机位置,ue卸载率,ue的计算任务,ue的遮挡情况这些参数来计算出最大处理时延。
参照下列公式:
max
{
t
l
o
c
a
l
,
k
(
i
)
,
t
U
A
V
,
k
(
i
)
+
t
t
r
,
k
(
i
)
}
\max \left\{t_{l o c a l, k}(i), t_{U A V, k}(i)+t_{t r, k}(i)\right\}
max{tlocal,k(i),tUAV,k(i)+ttr,k(i)}
def com_delay(self, loc_ue, loc_uav, offloading_ratio, task_size, block_flag): ''' 计算花费 Parameters ---------- loc_ue : 用户位置 loc_uav : 无人机位置 offloading_ratio : ue卸载率 task_size : ue的计算任务 block_flag : ue的遮挡情况 Returns ------- 时延 ''' # 获取uav与ue之间的距离 dx = loc_uav[0] - loc_ue[0] dy = loc_uav[1] - loc_ue[1] dh = self.height dist_uav_ue = np.sqrt(dx * dx + dy * dy + dh * dh) # 噪声功率 p_noise = self.p_noisy_los if block_flag == 1: p_noise = self.p_noisy_nlos g_uav_ue = abs(self.alpha0 / dist_uav_ue ** 2) # 信道增益 trans_rate = self.B * math.log2(1 + self.p_uplink * g_uav_ue / p_noise) # 上行链路传输速率bps t_tr = offloading_ratio * task_size / trans_rate # 上传时延,1B=8bit t_edge_com = offloading_ratio * task_size / (self.f_uav / self.s) # 在UAV边缘服务器上计算时延 t_local_com = (1 - offloading_ratio) * task_size / (self.f_ue / self.s) # 本地计算时延 # 比较上传到服务器的时间和本地计算的时间,时延越长,返回的值越高 return max([t_tr + t_edge_com, t_local_com])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
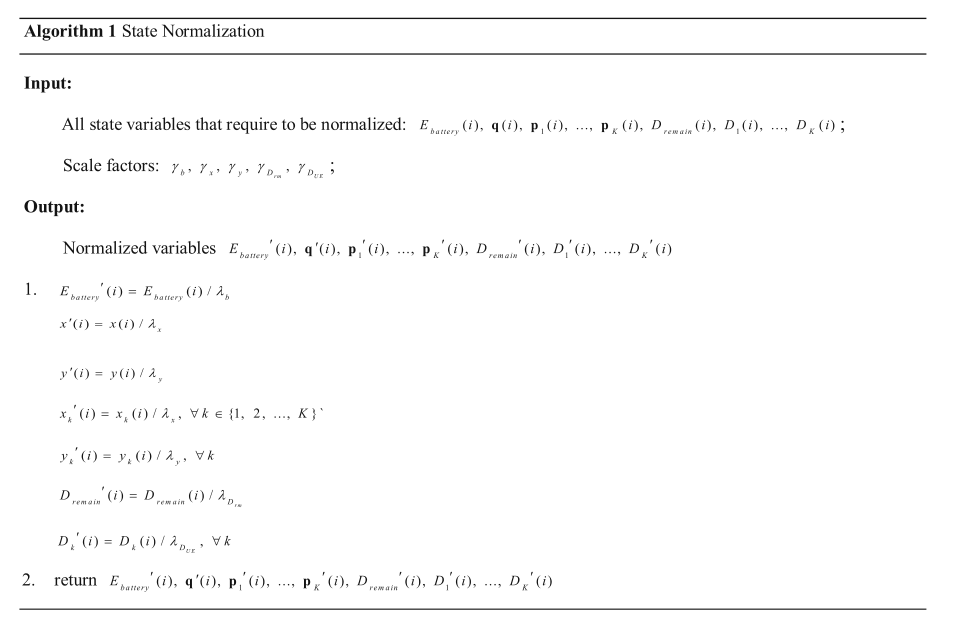
6.2 状态标准化
使用状态归一化算法对观测状态进行预处理,从而更有效地训练 DNN 。该算法将每个变量的最大值与最小值之差作为尺度因子。所提出的状态归一化算法可以很好地解决输入变量的大小差异问题。
在我们的工作中,变量 E battery ( i ) , q ( i ) , p 1 ( i ) , … , p K ( i ) , D remain ( i ) , D 1 ( i ) , … , D K − 1 ( i ) E_{\text {battery }}(i), \mathbf{q}(i), \mathbf{p}_{1}(i), \ldots, \mathbf{p}_{K}(i), D_{\text {remain }}(i), D_{1}(i), \ldots, D_{K-1}(i) Ebattery (i),q(i),p1(i),…,pK(i),Dremain (i),D1(i),…,DK−1(i) 和 D K − 1 ( i ) D_{K-1}(i) DK−1(i) 在状态集中处于不同的序列,这可能导致在训练中出现问题。如算法 1 所示,通过状态归一化对这些变量进行归一化,以防止出现这种问题。在状态归一化算法中,我们使用了五个尺度因子。每个因素可以解释如下。利用缩放因子 γ b \gamma_b γb 来缩小无人机电池容量。由于 UAV 和 UE 具有相同的 x 和 y 坐标范围,我们使用 γ x \gamma_x γx 和 γ y \gamma_y γy 分别缩小UAV和UE的x和y坐标。我们使用 γ D r m \gamma_{D_{rm}} γDrm 来缩小整个时间段内剩余的任务,使用 γ D U E \gamma_{D_{UE}} γDUE 来缩小时间段 i 内每个终端的任务大小。
import numpy as np from UAV_env import UAVEnv env = UAVEnv() M = env.M class StateNormalization(object): ''' 状态标准化类 ''' def __init__(self): self.high_state = np.array( [5e5, env.ground_length, env.ground_width, 100 * 1048576]) self.high_state = np.append(self.high_state, np.ones(M * 2) * env.ground_length) self.high_state = np.append(self.high_state, np.ones(M) * 3145728) self.high_state = np.append(self.high_state, np.ones(M)) self.low_state = np.zeros(20) # uav loc, ue loc, task size, block_flag self.low_state[len(self.low_state) - 2 * M:len(self.low_state) - M] = np.ones(M) * 2621440 def state_normal(self, state): state[len(state) - 2 * M: len(state) - M] -= 2621440 res = state / (self.high_state - self.low_state) return res
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
6.3 强化学习类
这里使用自己想要的强化学习类来完成对应的策略选择。以DQN为例:
# Deep Q Network off-policy class DeepQNetwork: def __init__( self, n_actions, n_features, learning_rate=0.1, reward_decay=0.001, e_greedy=0.99, replace_target_iter=200, memory_size=MEMORY_CAPACITY, batch_size=BATCH_SIZE, # e_greedy_increment=8.684615e-05, output_graph=False, ): ''' 初始化DQN网络 Parameters ---------- n_actions : TYPE 行为空间大小 n_features : TYPE 环境特征 learning_rate : TYPE, optional 学习率. The default is 0.1. reward_decay : TYPE, optional 奖励衰减因子. The default is 0.001. e_greedy : TYPE, optional e贪心因子. The default is 0.99. replace_target_iter : TYPE, optional 每多少次更新target参数. The default is 200. memory_size : TYPE, optional 记忆库大小. The default is MEMORY_CAPACITY. batch_size : TYPE, optional 批处理大小. The default is BATCH_SIZE. # e_greedy_increment : TYPE, optional e贪心因子增长幅度. The default is 8.684615e-05. output_graph : TYPE, optional 是否输出图表. The default is False. Returns ------- None. ''' self.n_actions = n_actions self.n_features = n_features self.lr = learning_rate self.gamma = reward_decay self.epsilon_max = e_greedy self.replace_target_iter = replace_target_iter self.memory_size = memory_size self.batch_size = batch_size # self.epsilon_increment = e_greedy_increment # self.epsilon = 0 if e_greedy_increment is not None else self.epsilon_max self.epsilon = 0.99 # total learning step self.learn_step_counter = 0 # initialize zero memory [s, a, r, s_] # 初始化记忆库 self.memory = np.zeros((MEMORY_CAPACITY, s_dim * 2 + 2), dtype=np.float32) # memory里存放当前和下一个state,动作和奖励 # consist of [target_net, evaluate_net] # 构建神经网络 self._build_net() # tf.get_collection():从一个集合中取出变量 # tf.GraphKeys 包含所有graph collection中的标准集合名 # tf.GraphKeys.GLOBAL_VARIABLES 则应该是所有的图变量的集合 t_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='target_net') e_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='eval_net') with tf.variable_scope('hard_replacement'): self.target_replace_op = [tf.assign(t, e) for t, e in zip(t_params, e_params)] self.sess = tf.Session() if output_graph: # $ tensorboard --logdir=logs tf.summary.FileWriter("logs/", self.sess.graph) # 全局变量初始化 self.sess.run(tf.global_variables_initializer()) self.cost_his = [] def _build_net(self): ''' 构建所有的网络图 Returns ------- None. ''' # ------------------ all inputs ------------------------ self.s = tf.placeholder(tf.float32, [None, self.n_features], name='s') # input State self.s_ = tf.placeholder(tf.float32, [None, self.n_features], name='s_') # input Next State self.r = tf.placeholder(tf.float32, [None, ], name='r') # input Reward self.a = tf.placeholder(tf.int32, [None, ], name='a') # input Action # 满足正态分布 w_initializer, b_initializer = tf.random_normal_initializer(0., 0.3), tf.constant_initializer(0.1) # ------------------ build evaluate_net ------------------ with tf.variable_scope('eval_net'): # tf.layers.dense():添加一个全连接层 # tf.nn.relu6:计算校正线性6:min(max(features, 0), 6) e1 = tf.layers.dense(self.s, 100, tf.nn.relu6, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='e1') # e2 = tf.layers.dense(e1, 48, tf.nn.relu6, kernel_initializer=w_initializer, # bias_initializer=b_initializer, name='e2') e3 = tf.layers.dense(e1, 20, tf.nn.relu, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='e3') self.q_eval = tf.layers.dense(e3, self.n_actions, tf.nn.softmax, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='q') # ------------------ build target_net ------------------ with tf.variable_scope('target_net'): t1 = tf.layers.dense(self.s_, 100, tf.nn.relu6, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='t1') # t2 = tf.layers.dense(t1, 48, tf.nn.relu6, kernel_initializer=w_initializer, # bias_initializer=b_initializer, name='t2') t3 = tf.layers.dense(t1, 20, tf.nn.relu, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='t3') self.q_next = tf.layers.dense(t3, self.n_actions, tf.nn.softmax, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='t4') with tf.variable_scope('q_target'): q_target = self.r + self.gamma * tf.reduce_max(self.q_next, axis=1, name='Qmax_s_') # shape=(None, ) self.q_target = tf.stop_gradient(q_target) with tf.variable_scope('q_eval'): a_indices = tf.stack([tf.range(tf.shape(self.a)[0], dtype=tf.int32), self.a], axis=1) self.q_eval_wrt_a = tf.gather_nd(params=self.q_eval, indices=a_indices) # shape=(None, ) with tf.variable_scope('loss'): self.loss = tf.reduce_mean(tf.squared_difference(self.q_target, self.q_eval_wrt_a, name='TD_error')) with tf.variable_scope('train'): # self._train_op = tf.train.RMSPropOptimizer(self.lr).minimize(self.loss) self._train_op = tf.train.AdamOptimizer(self.lr).minimize(self.loss) def store_transition(self, s, a, r, s_): ''' 存储记忆元组 Parameters ---------- s : 当前状态 a : 动作 r : 奖惩 s_ : 下一状态 Returns ------- None. ''' if not hasattr(self, 'memory_counter'): self.memory_counter = 0 # np.hstack将参数元组的元素数组按水平方向进行叠加 transition = np.hstack((s, a, [r], s_)) # replace the old memory with new memory index = self.memory_counter % self.memory_size self.memory[index, :] = transition self.memory_counter += 1 def choose_action(self, observation): ''' 根据当前状态选择动作 Parameters ---------- observation : 对环境的观测 Returns ------- action : 做出的动作 ''' # to have batch dimension when feed into tf placeholder # 环境状态 observation = observation[np.newaxis, :] # e贪心算法 if np.random.uniform() < self.epsilon: # forward feed the observation and get q value for every actions actions_value = self.sess.run(self.q_eval, feed_dict={self.s: observation}) action = np.argmax(actions_value) else: action = np.random.randint(0, self.n_actions) return action def learn(self): ''' 神经网络训练 Returns ------- None. ''' # check to replace target parameters if self.learn_step_counter % self.replace_target_iter == 0: self.sess.run(self.target_replace_op) print('\ntarget_params_replaced\n') # sample batch memory from all memory # 从所有记忆中选取小批量记忆 if self.memory_counter > self.memory_size: sample_index = np.random.choice(self.memory_size, size=self.batch_size) else: sample_index = np.random.choice(self.memory_counter, size=self.batch_size) batch_memory = self.memory[sample_index, :] _, cost = self.sess.run( [self._train_op, self.loss], feed_dict={ self.s: batch_memory[:, :self.n_features], self.a: batch_memory[:, self.n_features], self.r: batch_memory[:, self.n_features + 1], self.s_: batch_memory[:, -self.n_features:], }) self.cost_his.append(cost) # increasing epsilon # self.epsilon = self.epsilon + self.epsilon_increment if self.epsilon < self.epsilon_max else self.epsilon_max self.learn_step_counter += 1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233

