
- 1JAVA面试题分享四百八十三:编程新范式,当Spring Boot遇上OpenAI
- 2VR技术揭秘:从头到尾解析VR的实现原理_虚拟现实技术的实现方式
- 3二分查找比较次数_开发面试题之二分法插入排序
- 4springboot的一些开源项目
- 5Column 'id' in field list is ambiguous
- 6基于verilog的UART串行总线协议模块设计(含原理、源码、AXI封装、C驱动文件)_verlog实现串口协议
- 7表情识别项目综述论文阅读总结
- 8从原理到实践:深入探索Linux安全机制(一,从青铜到王者的路线
- 9信息系统项目管理师 第一章 信息化和信息系统 核心知识点总结_信息系统项目管理师人才是核心
- 10Stable Diffusion教程|怎么写提示词prompt语法格式详解和实战_sd提示权重
如何制作一台ROS小车(一)
赞
踩
前言
由于参加学校的大学生创新训练项目,我们决定制作一款基于ROS系统的智能医疗机器人。(其实严格意义上来讲也不算是机器人,只是一台混搭了不同功能的小车罢了。) 决定写下此文章来记录我们的开发历程,并广泛收集整合各种资料,以一点微薄之力,方便学习ROS的小伙伴。
ROS是机器人操作系统(Robot Operating System)的缩写,是一种开源的机器人软件平台,由加州大学伯克利分校机器人与自主系统实验室(Robotics and Autonomous Systems Laboratory,简称RASL)开发。ROS提供了一系列的工具、库和约定,使得机器人的软件开发更加简单、快速,通过ROS,可以实现机器人的感知、定位、控制等功能。ROS支持多种编程语言,包括C++、Python等,同时也有广泛的社区支持和资源。
由于我们只是普通的本科生,所以在前期做了大量的准备工作,找了许多教程。我们首先参考了古月居老师的视频课,他的课浅显易懂,给予了我们许多帮助,但是在学习和实践过程中缺少很多细节。后来我们又参考了赵老师的课程,受益颇深。
赵老师的课程
https://www.bilibili.com/video/BV1Ci4y1L7ZZ/
赵老师视频笔记所在地址
http://www.autolabor.com.cn/book/ROSTutorials
关于ROS的基本简介就不多赘述,网上资料非常多,大家可以观看古月居21讲,可以对ROS系统有一个初步的了解。本文主要记录ROS系统的安装过程。 下面进入正题。
1 安装VMware个人版(免费)
VMware Workstation Player 官方下载网址【点击】
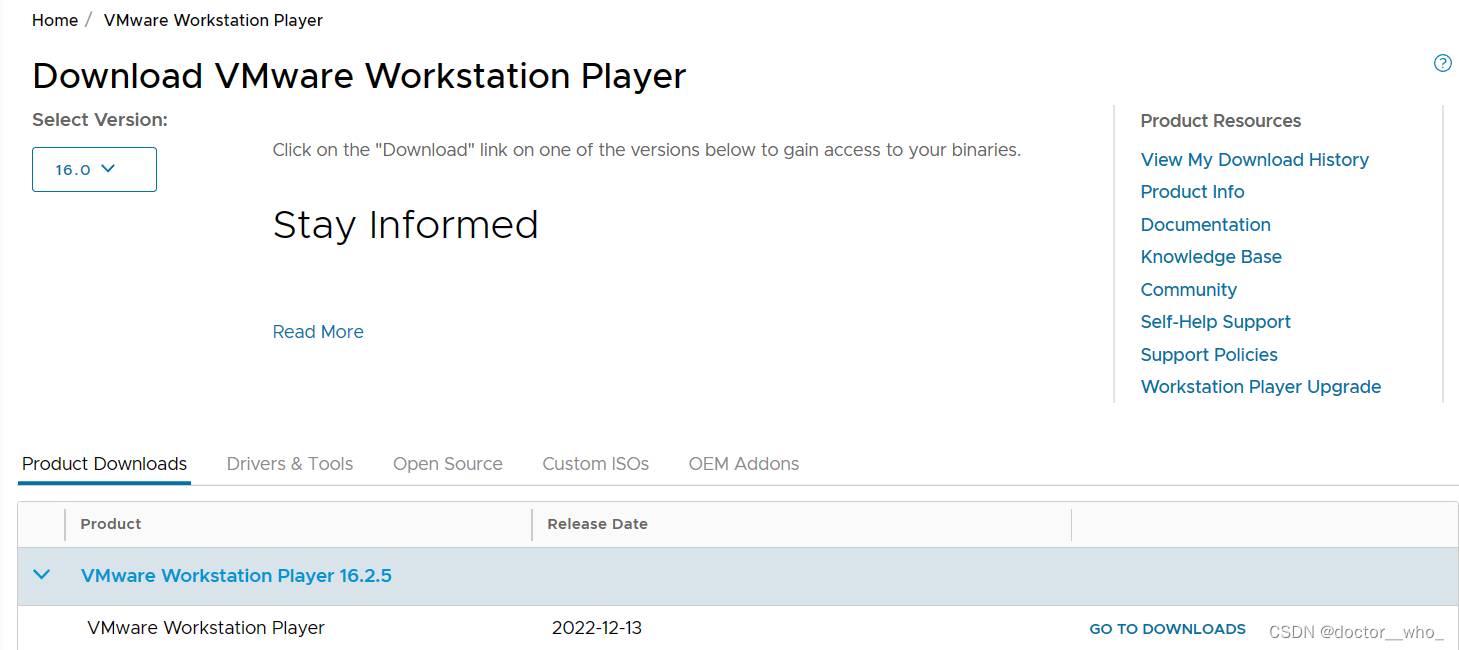
访问此页面,点击DOWNLOAD,转到下载页面,最好下载版本号带16的,虽然不新但是教程多,方便排查错误。
1.2 安装VMware和Ubuntu
这部分的内容参考博客前半段。
虚拟机安装+Ubuntu安装+ROS安装_ros虚拟机安装_Legend_F的博客-CSDN博客

注意在这一段创建密码时,可以设置一位密码,方便后续安装过程。
本例程以Ubuntu 20.04为基础。
2 在Ubuntu上安装ROS系统
2.1 设置安装源
-----以下安装步骤一定要在网络较好时完成!!!---
首先用Shift + Alt +T 打开终端,敲入。
- sudo apt-get install open-vm-tools //安装工具open-vm-tools
- sudo apt-get install open-vm-tools-desktop //安装open-vm-tools-desktop
因为虚拟机和我们的PC端之间无法直接复制,或者说无法直接用快捷键进行复制,安装后便可调用 Shift + Ctrl +C 和 Shift + Ctrl +V 直接复制,方便不少!!!
没有科技,我们默认选择国内的清华源,在Ubuntu桌面上,用Shift + Alt +T 打开终端,敲入
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
如果有科技,可以考虑安装默认源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
我们的Linux在安装软件的时候,需要通过源列表去寻找对应的一个软件,Ubuntu默认的软件列表是没有ROS的,我们需要把packags.ros.org这样的一个网站给配置到我们的软件仓库列表内才能下载ROS,不然显示的是没有这个软件(因为你的软件列表,也就是源列表没有)。
回车后要输入密码,手速要快!
2.2 设置KEY
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
如果没有问题。那就会显示“已导入”。
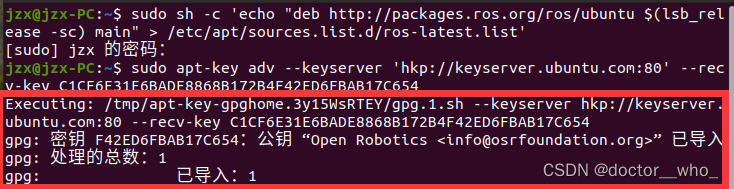
配置公网密钥,这一步是确保我们的系统认为这个路径是安全的,下载文件是没有问题的。不然下载的东西会立刻被清除掉。
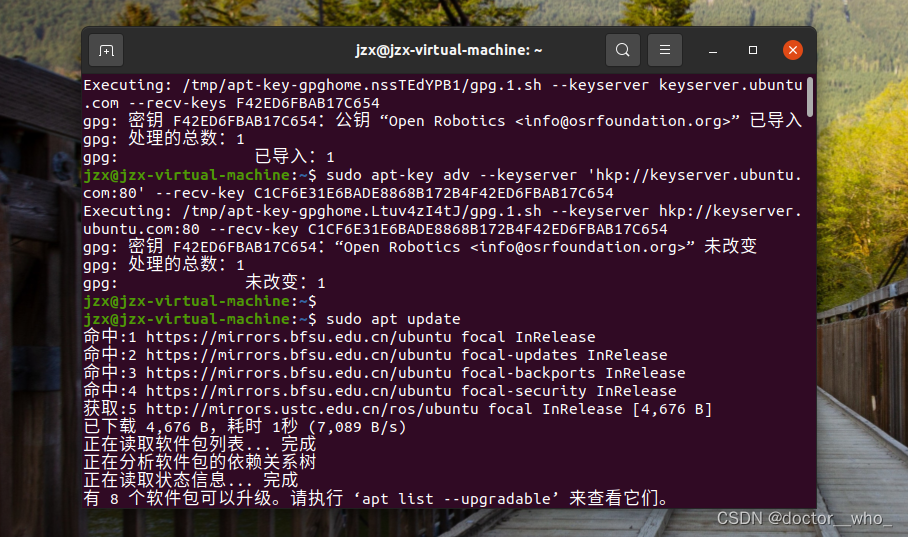
2.3 安装ROS
sudo apt update
2.4 安装全量功能包
sudo apt install ros-noetic-desktop-full
这里安装的是ROS的全量功能包,也是官方推荐的。如果一切没有问题,成功安装的话,会显示如下界面。
3 换源操作
这里放上别的博主写的关于软件换源的方法,更直观。
https://blog.csdn.net/qq_44339029/article/details/108916820
4 安装依赖
4.1 安装依赖相关工具
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
4.2 ROS中使用许多工具前,要求需要初始化rosdep(可以安装系统依赖)
sudo apt install python3-rosdep
4.3 初始化rosdep
- sudo rosdep init
- rosdep update
这步会遇到许多问题,如果网络不好即使用国内网络,可能资源会被墙,如果小伙伴有相应的工具,那就可以省去下面的步骤。如果成功,那就是下图所示。

4.3.1 解决办法一
错误:ERROR: cannot download default sources list from:https : //raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.listWebsite may be down.
在终端中输入
sudo gedit /etc/hosts
在打开的hosts文件中添加如下的内容,然后保存退出
199.232.28.133 raw.githubusercontent.com
关于上面这条语句,它的内容可能会变化,通过IPAddress.com首页,输入raw.githubusercontent.com查询到最新的真实IP地址,新的地址是这个: 185.199.109.133 raw.githubusercontent.com,但是我使用上面那条语句中的地址也成功了,没有成功的小伙伴可以试一下改成最新的地址试一下。
对于sudo rosdep init这条指令当使用无线网络执行超时的话,可以尝试用手机热点!!!
4.3.2 解决办法二
错误:ERROR: default sources list file already exists: /etc/ros /rosdep/sources.list.d/20-default.listPlease delete if you wish to re-initialize
打开终端,输入
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
在运行sudo rosdep init 就可以获得成功界面了。
以上部分内容整理自 博主「慕羽★」的相关博客,并参考赵老师的相关讲义内容,再次感谢前辈的帮助。可以浏览他们的博客学习更多方法。
详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)_ubuntu20.04安装ros_慕羽★的博客-CSDN博客
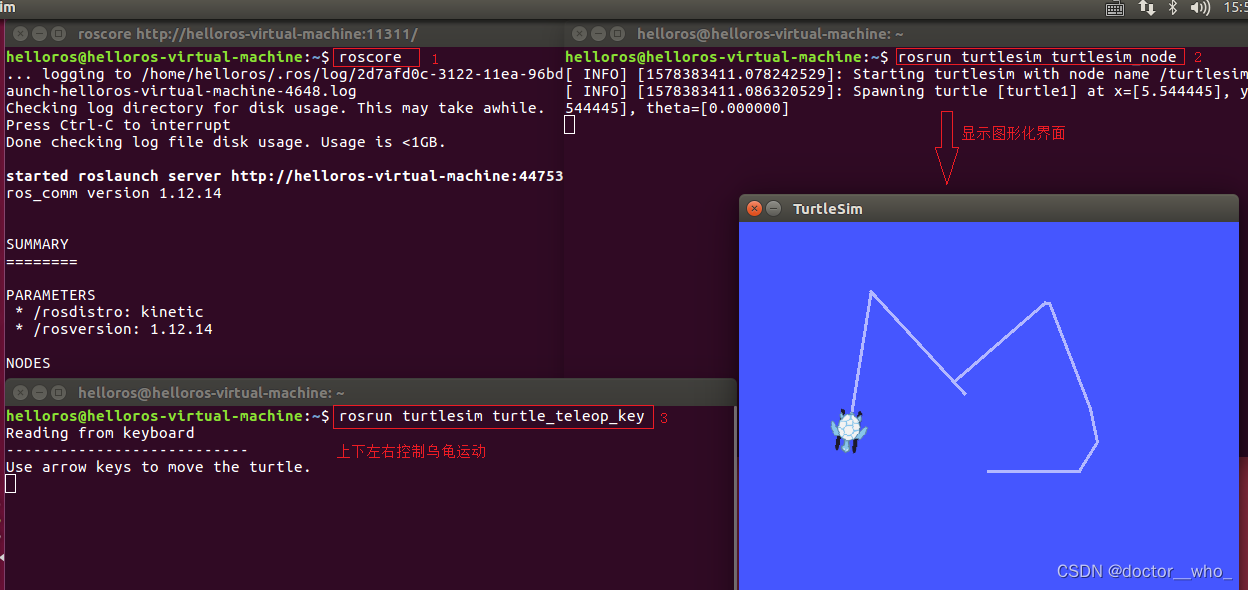
5 测试并启动ROS
-
首先启动三个命令行(ctrl + alt + T)
-
命令行1键入:roscore
-
命令行2键入:rosrun turtlesim turtlesim_node(此时会弹出图形化界面)
-
命令行3键入:rosrun turtlesim turtle_teleop_key(在3中可以通过上下左右控制2中乌龟的运动)
至此,ROS的安装部分就结束了。

