
热门标签
热门文章
- 1机械臂全面学习---moveit和gazebo联合仿真_机械臂yaml仿真
- 2开源模型应用落地-语音转文本-whisper模型-AIGC应用探索(一)_开源的语音转学 whisper
- 3使用Postman测试WebService接口_postman调用wsdl接口
- 4libpython3.8.so.1.0: cannot open shared object file: No such file or directory_importerror: libpython3.8.so.1.0: cannot open shar
- 5 为容器安全苦恼?这份清单整理了27种容器安全工具
- 6Moveit +Gazebo:搭建单臂机械臂仿真平台_moveit gazebo
- 7Elasticsearch 认证模拟题 - 16
- 8【ROS2机器人入门到实战】通过JointStates控制RVIZ2关节_如何通过话题或服务或action获取rviz2规划的关节信息
- 9自然语言处理:机器翻译文本摘要情感分析_机器翻译自然语言
- 10OpenNLP ngram n元语法模型(简介)_opennlp模型扩展
当前位置: article > 正文
ROS :发送一个目标位置,机器人自动规划路线,移动到该位置。_ros如何指定一个点,每次导航时可以自动移动到该点
作者:Gausst松鼠会 | 2024-06-11 17:05:11
赞
踩
ros如何指定一个点,每次导航时可以自动移动到该点
使用 Action :move_base_msgs::MoveBaseAction(move_base在world中的目标)
新建send_goal.cpp
/*
* send_goal.cpp
*
* Created on: Aug 10, 2016
* Author: unicorn
*/
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
/*move_base_msgs::MoveBaseAction
move_base在world中的目标
*/
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main(int argc, char** argv) {
ros::init(argc, argv, "send_goals_node");
/*
// create the action client
// true causes the client to spin its own thread
//don't need ros::spin()
创建action客户端,参数1:action名,参数2:true,不需要手动调用ros::spin(),会在它的线程中自动调用。
*/
MoveBaseClient ac("move_base", true);
// Wait 60 seconds for the action server to become available
ROS_INFO("Waiting for the move_base action server");
ac.waitForServer(ros::Duration(60));
ROS_INFO("Connected to move base server");
// Send a goal to move_base
//目标的属性设置
move_base_msgs::MoveBaseGoal goal;
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = 21.174;
goal.target_pose.pose.position.y = 10.876;
goal.target_pose.pose.orientation.w = 1;
ROS_INFO("");
ROS_INFO("Sending goal");
ac.sendGoal(goal);
// Wait for the action to return
ac.waitForResult();
if (ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("You have reached the goal!");
else
ROS_INFO("The base failed for some reason");
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
CMakeList.txt
add_executable(send_goal src/send_goal.cpp)
target_link_libraries(send_goal
${catkin_LIBRARIES}
)- 1
- 2
- 3
- 4
新建launch文件goal_launch.launch
<launch>
<master auto="start"/>
<param name="/use_sim_time" value="true"/>
<include file="$(find navigation_stage)/move_base_config/move_base.xml"/>
<node pkg="stage_ros" type="stageros" name="stageros" args="$(find navigation_stage)/stage_config/worlds/willow-pr2-2.5cm.world" respawn="false" >
<param name="base_watchdog_timeout" value="0.2"/>
</node>
<include file="$(find navigation_stage)/move_base_config/amcl_node.xml"/>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find navigation_stage)/single_robot.rviz" />
<node name="send_goal" pkg="navigation_example" type="send_goal" output="screen"/>
</launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
launch 中的节点
<node name="map_server" pkg="map_server" type="map_server" args="$(find navigation_stage)/stage_config/maps/" respawn="false" />- 1
使用willow-full-0.025.pgm 0.025,注意要换成自己的文件目录,我的是在navigation_stage/stage_config/maps/文件中。
其他节点类似。
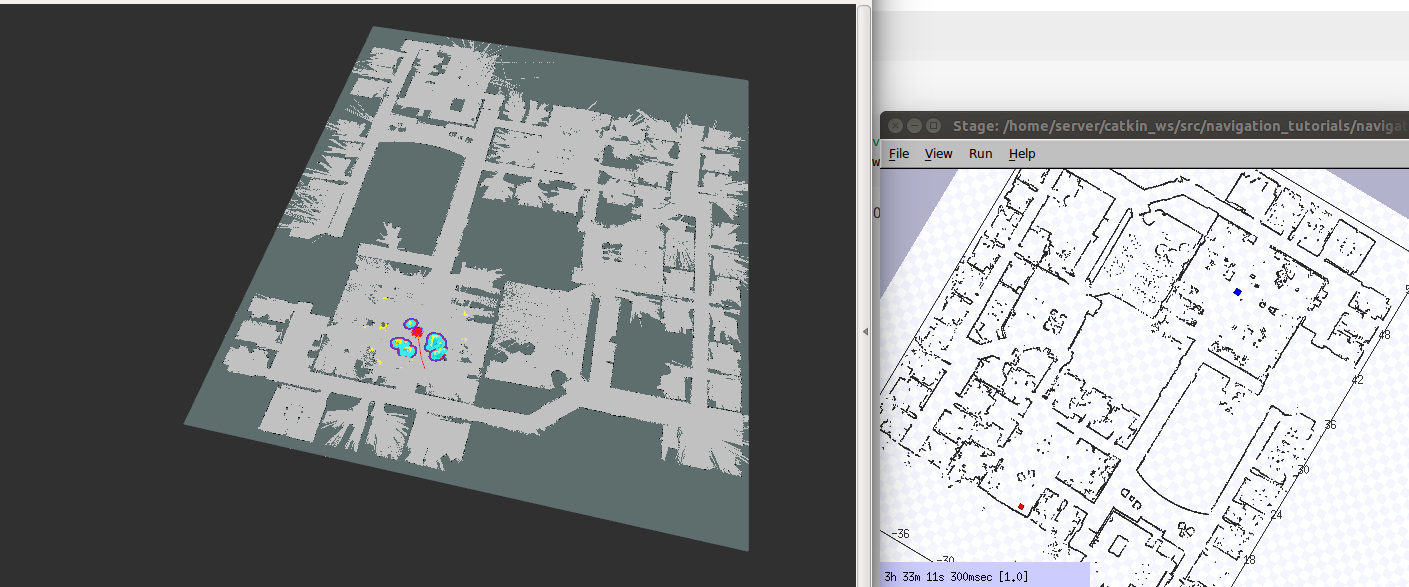
运行launch。
结果:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/704048
推荐阅读
相关标签

