
热门标签
热门文章
- 1【架构之路】微服务中常用的几种通信方式_微服务架构中,服务间通信方式
- 2基于springboot的旅游管理系统_基于springboot 的爱旅游系统技术介绍
- 3杭电考研计算机专业课_考研计算机专业需要准备哪些专业课?
- 4Unity 中 Pivot 与 Center,重置模型物体的轴心为中心_unity pivot
- 5AI绘画师:从算法到艺术
- 6python实现stream流式传输,边生成,边返回给客户端_python stream流
- 7高项考试-信息化知识_高项 信息技术发展记忆口诀
- 8问题解决:网上导入git项目,各种报错_error importing repository into
- 9QFileSystemModel_qfilesystemodel 自动刷新
- 10大专生能进大厂吗?程序员初学者想进大厂有哪些建议?_大专能进大厂吗
当前位置: article > 正文
智能驾驶系列报告:特斯拉智能驾驶方案简剖
作者:Guff_9hys | 2024-07-01 08:47:14
赞
踩
智能驾驶系列报告:特斯拉智能驾驶方案简剖
-
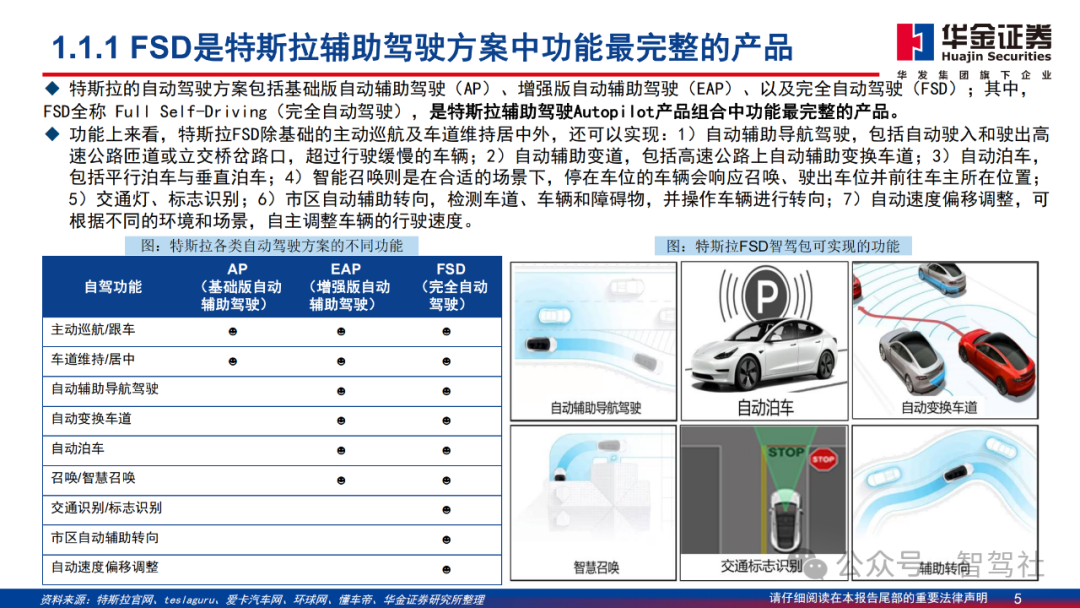
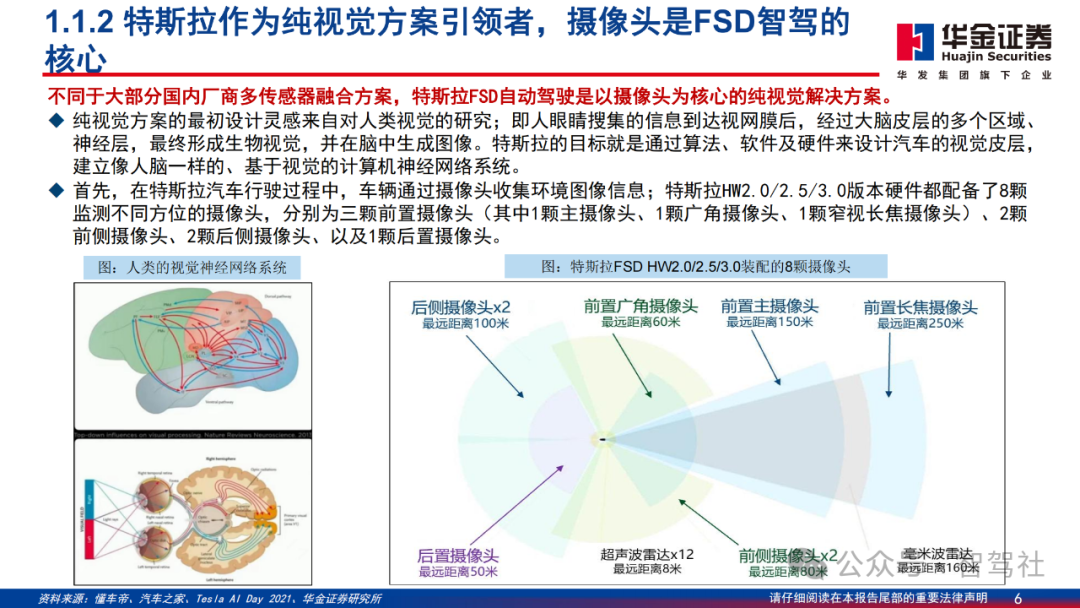
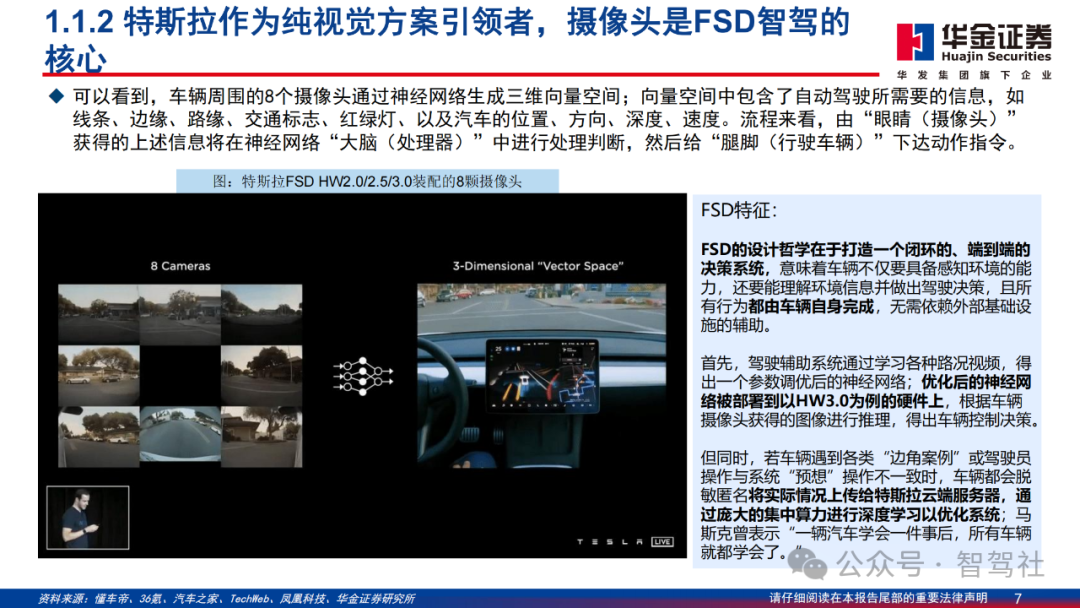
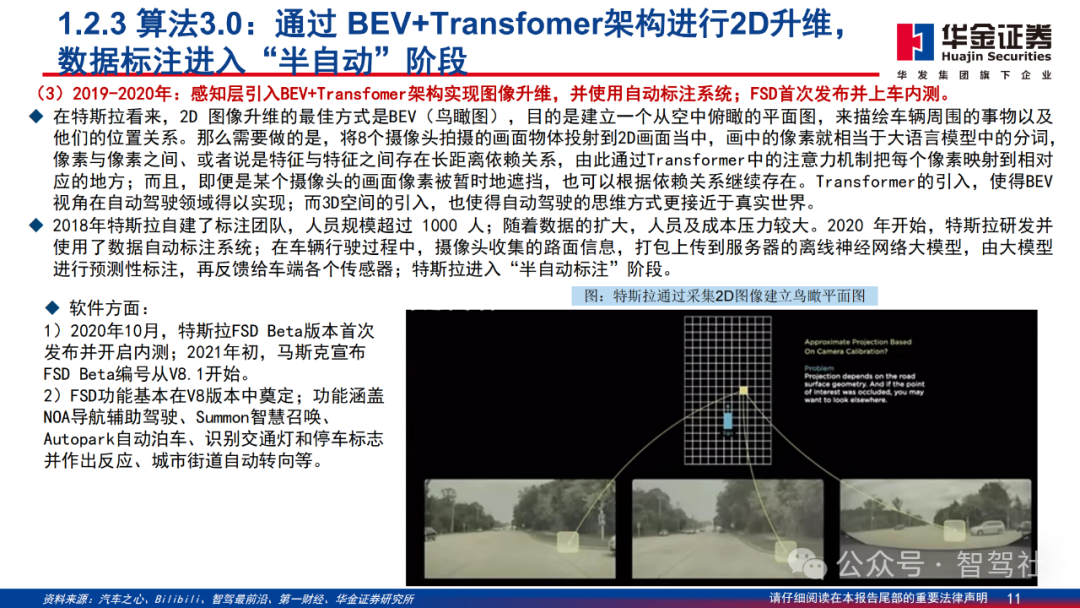
不同于绝大多数国内车企在自动驾驶上采取多传感器融合方案,特斯拉FSD在发展初期就摒弃激光雷达、且不配备高清地图,成为在感知层以摄像头为核心的纯视觉解决方案代表;其依靠车身搭载的摄像头来捕捉周围的环境信息,并经过算法及神经网络模型处理,最终输出3D场景下的信息用于智能驾驶。
-
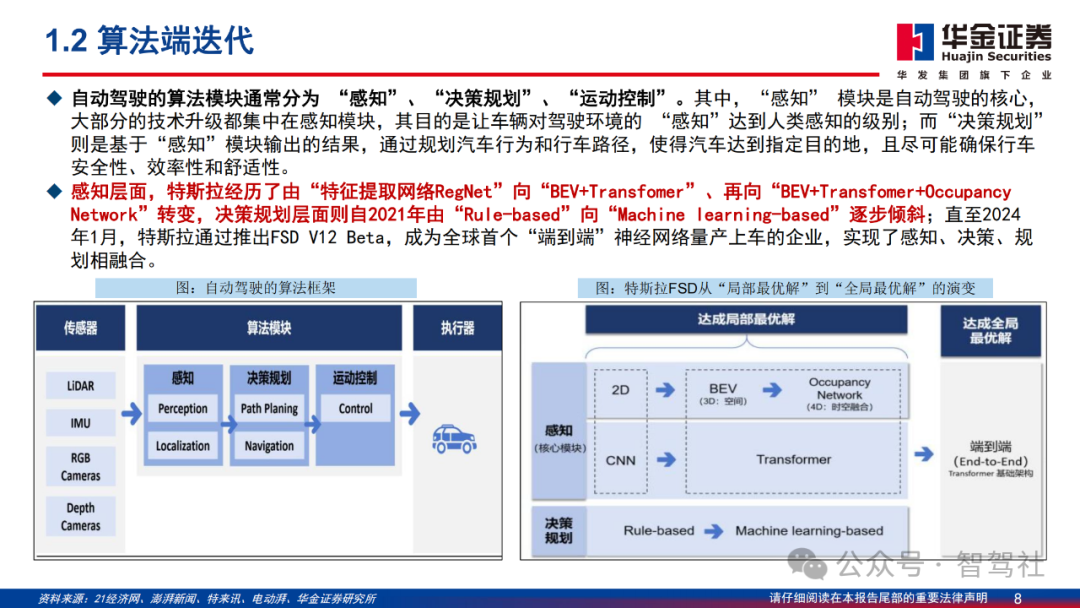
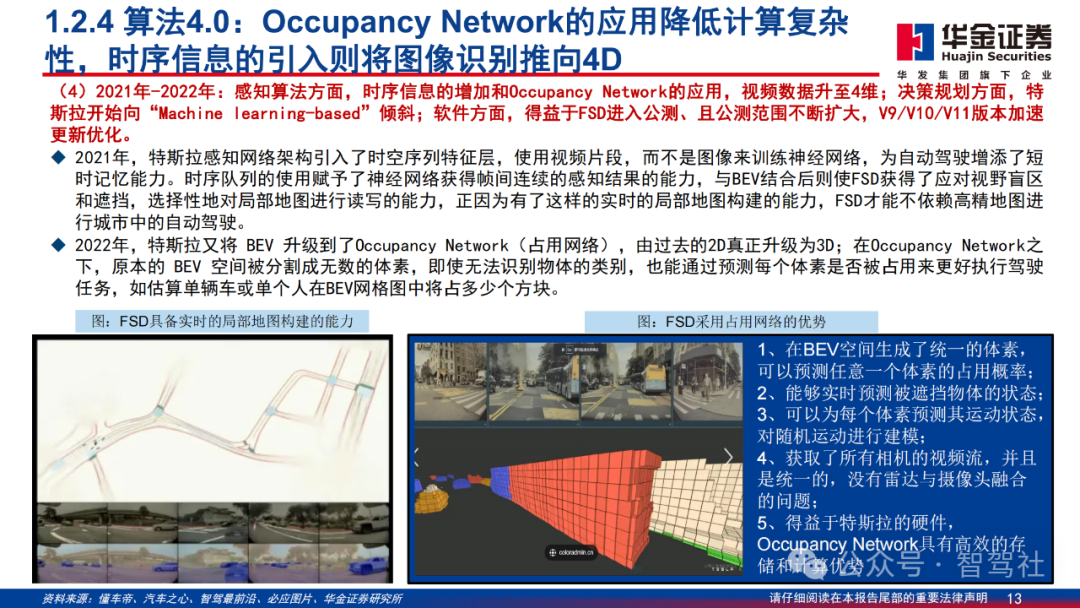
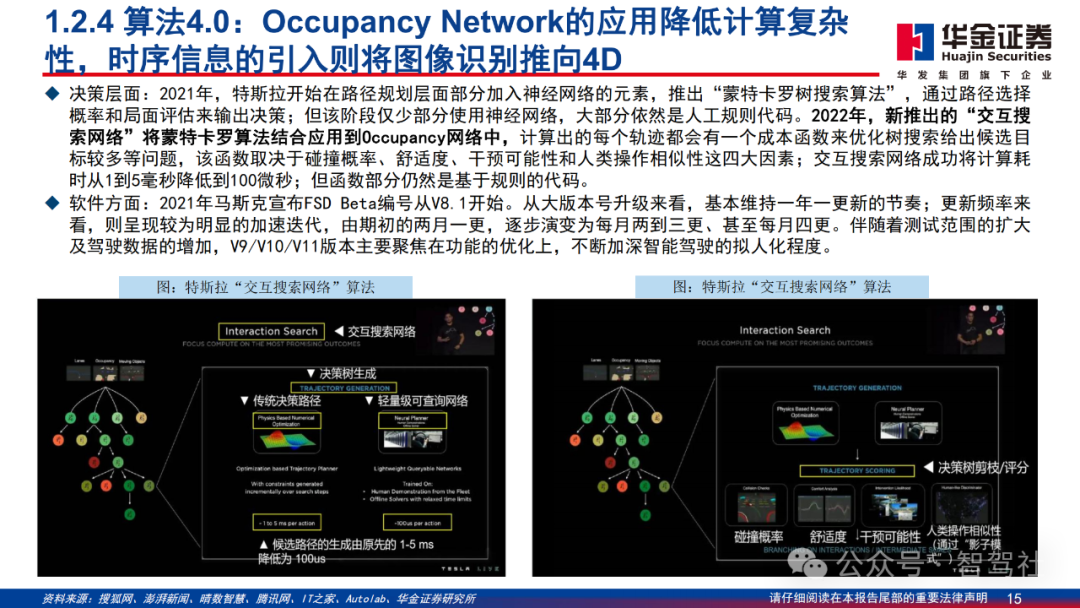
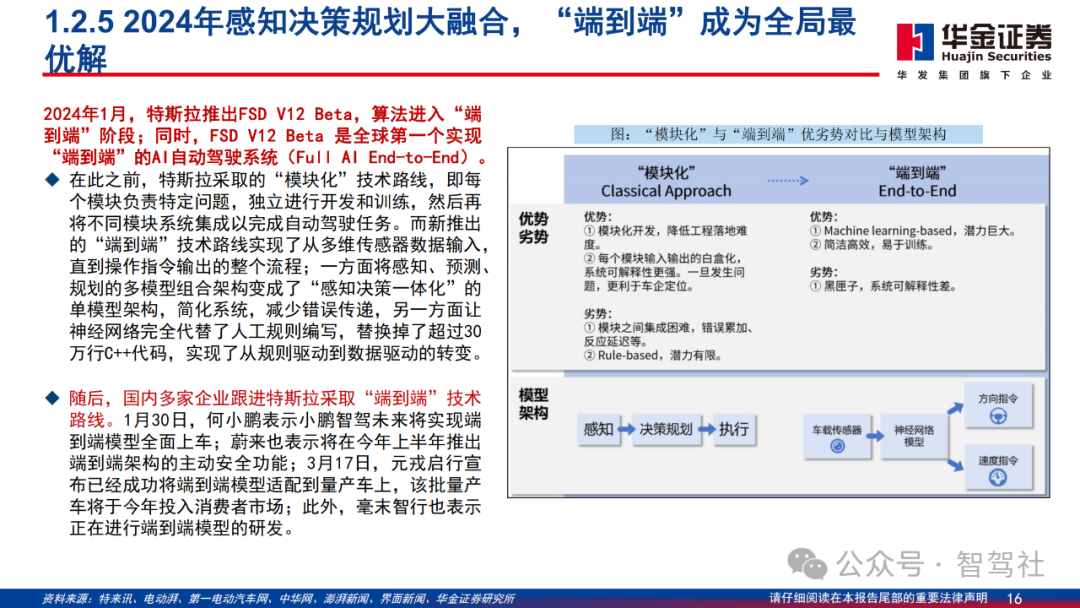
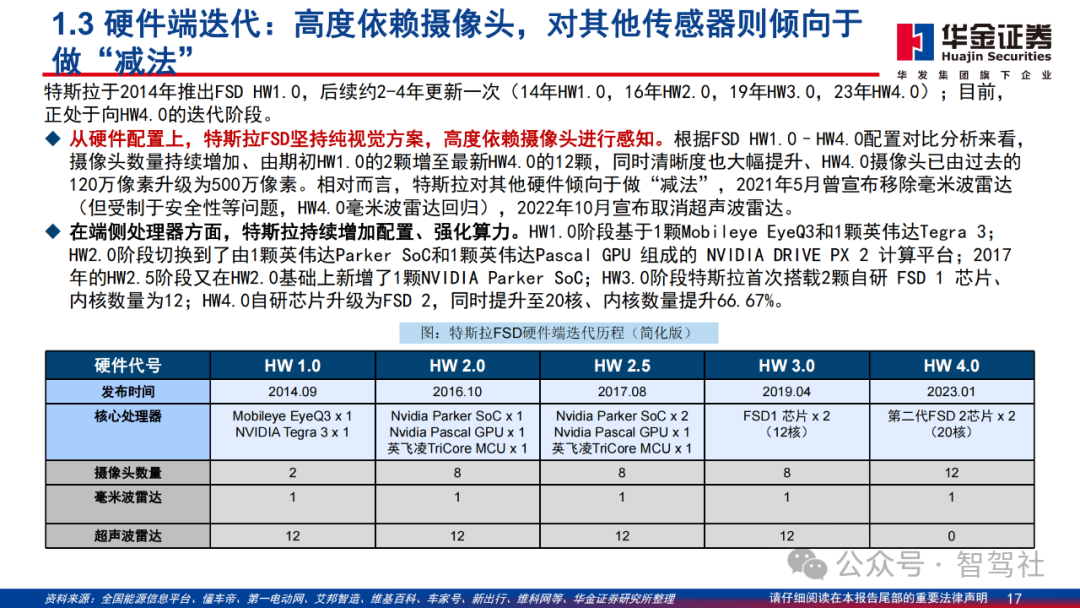
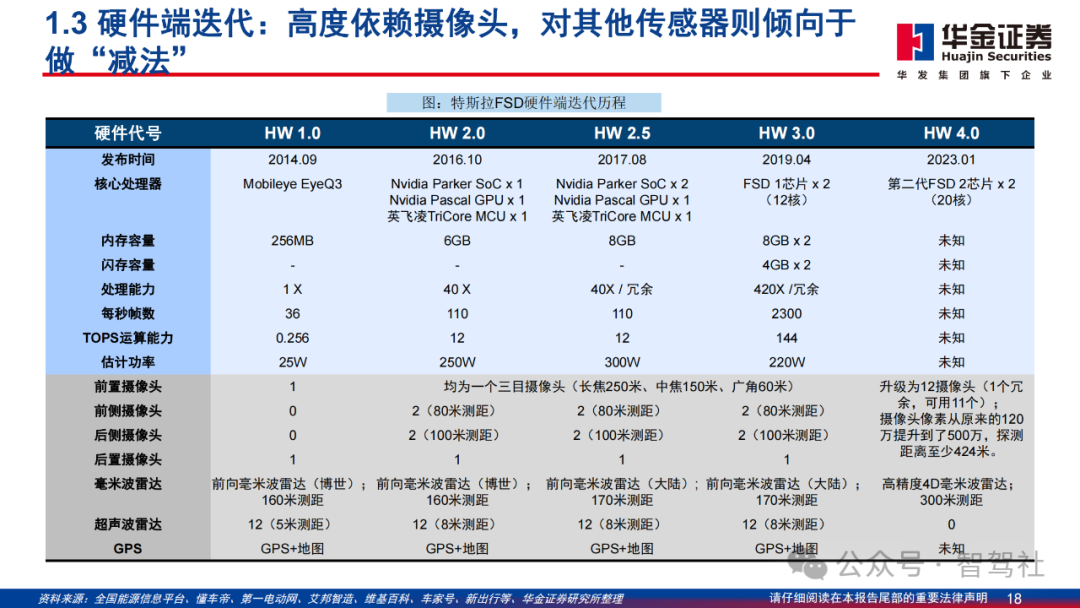
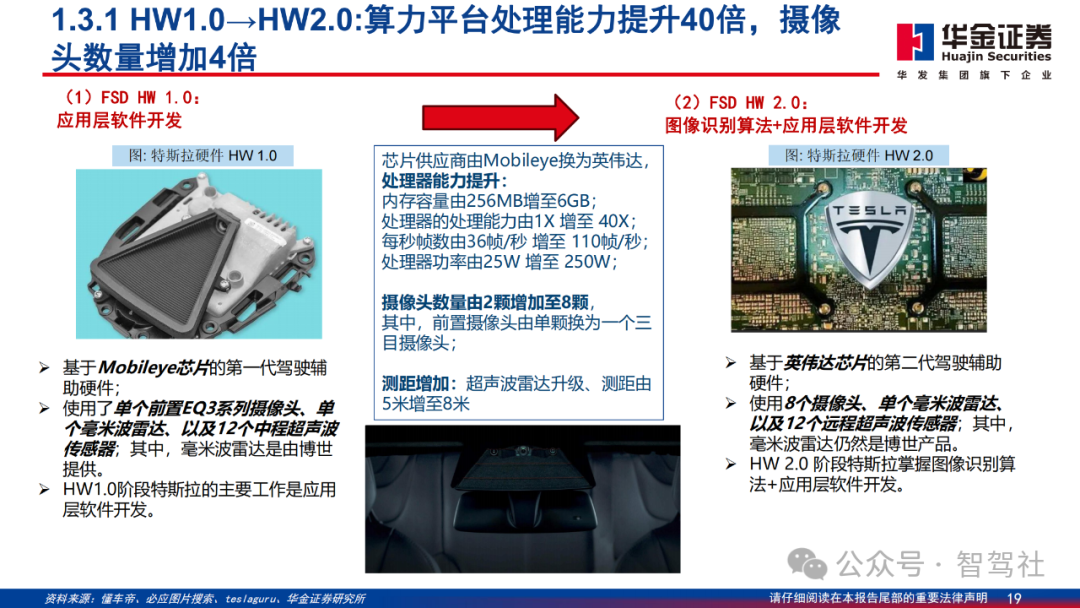
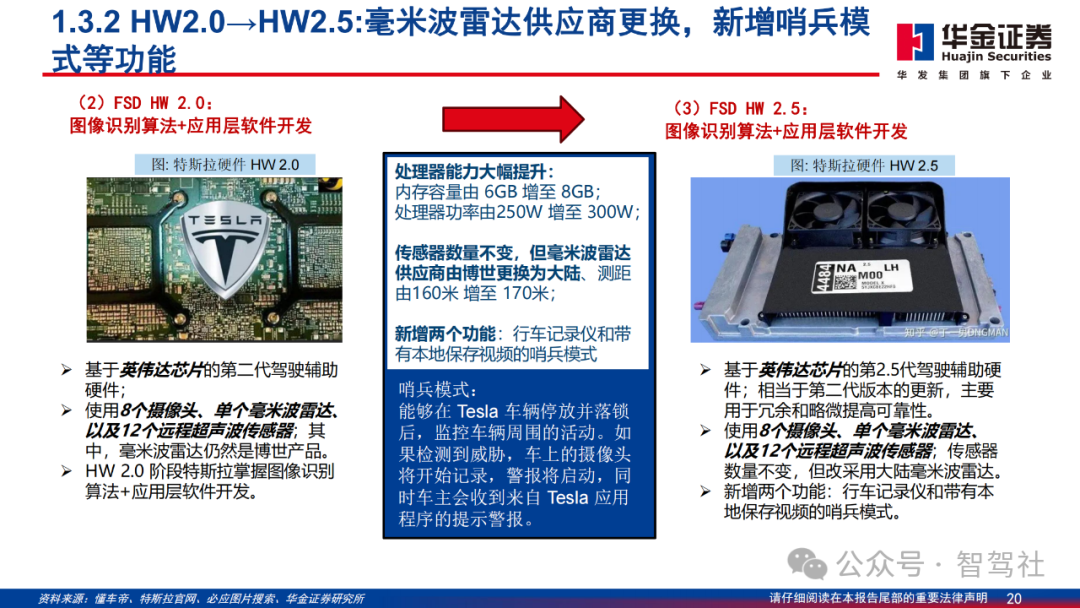
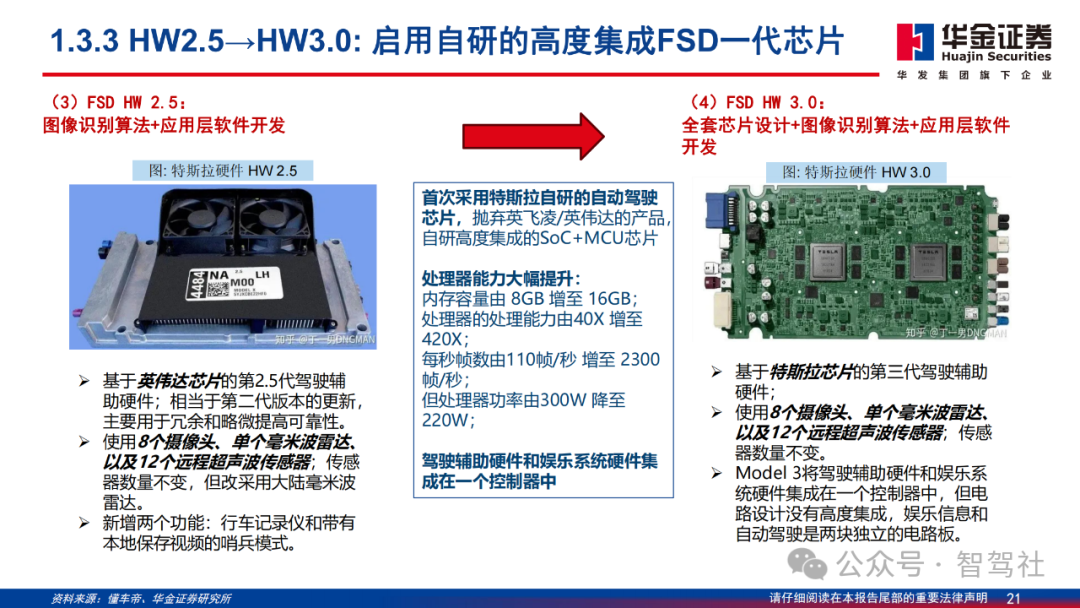
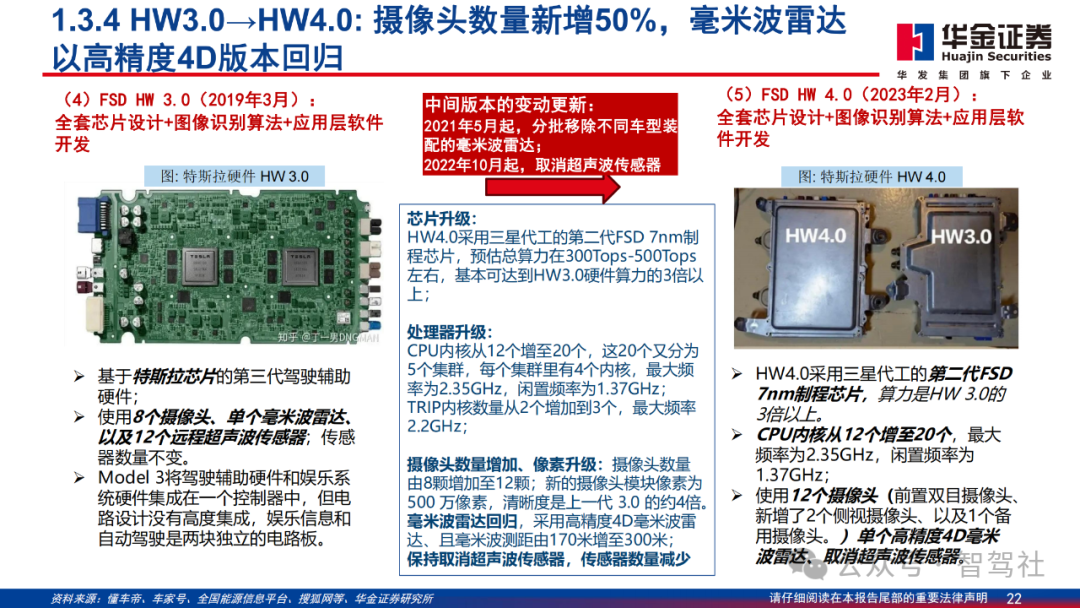
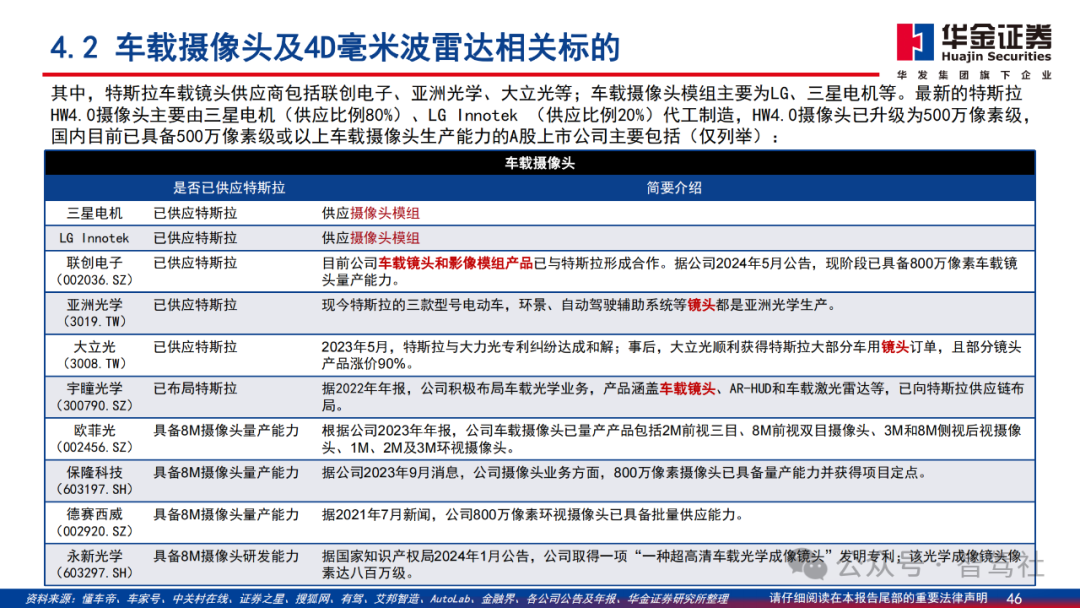
FSD智能驾驶的实现基于特斯拉独树一帜的软件算法,创新性的提出BEV+Transformer+0ccupancy Network的感知范式,并成为全球首家“端到端”神经网络量产上车的企业,实现了从繁琐规则驱动到数据驱动的简化,小鹏、蔚来等多家国内车企纷纷追随;硬件端方面,特斯拉持续增加摄像头数量,对其他传感器则倾向于做“减法”,以更好地适配其纯视觉技术路线。
-
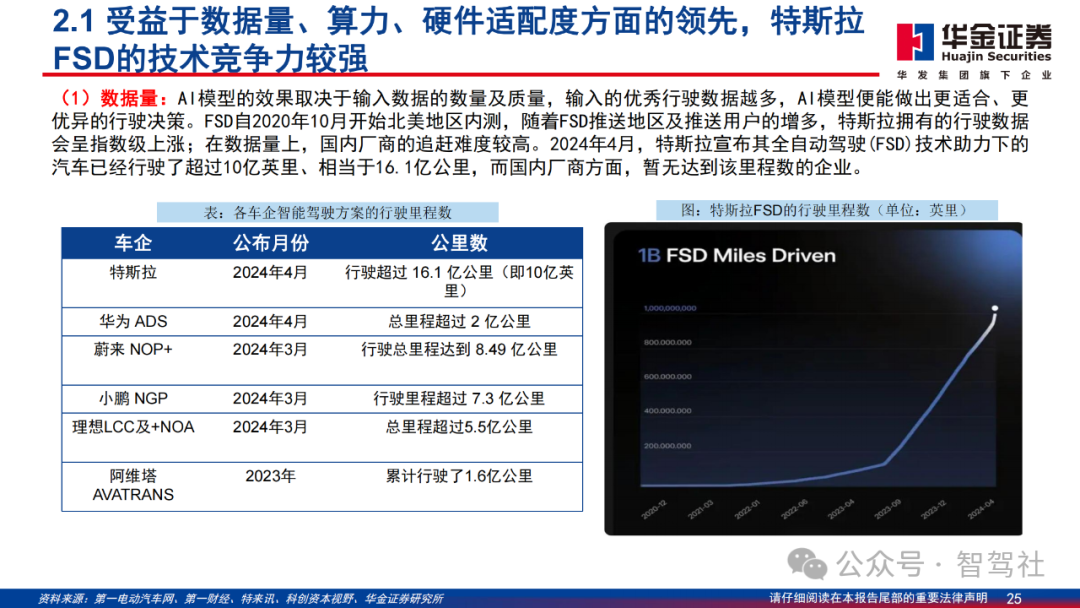
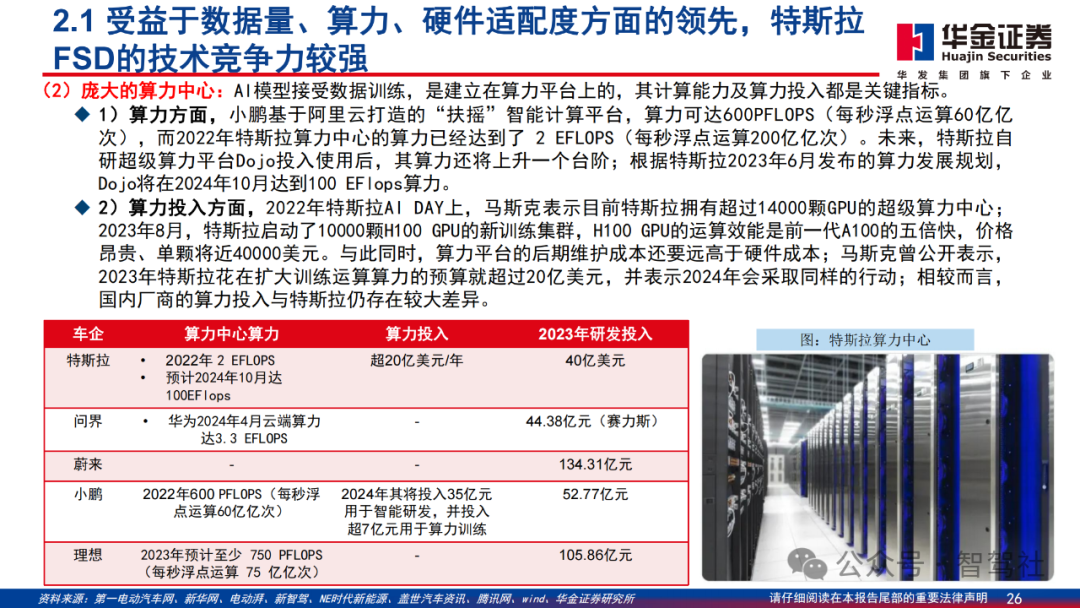
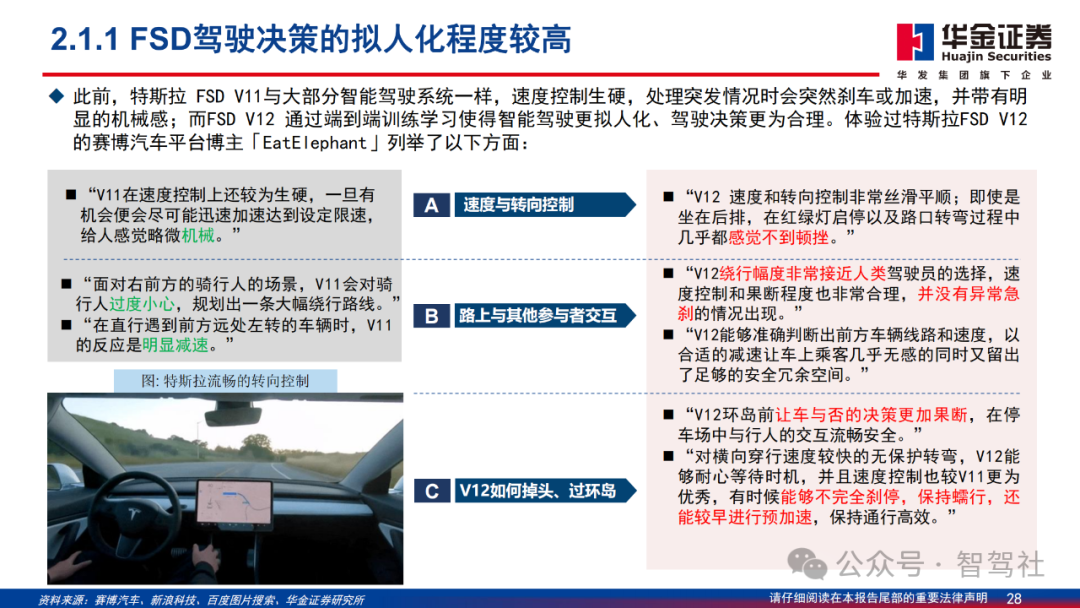
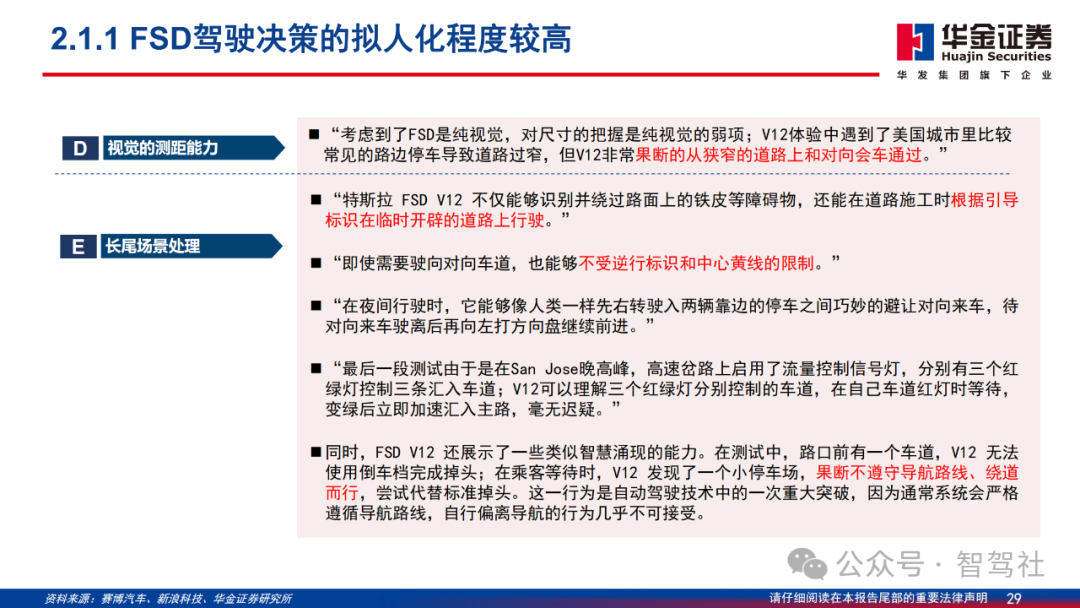
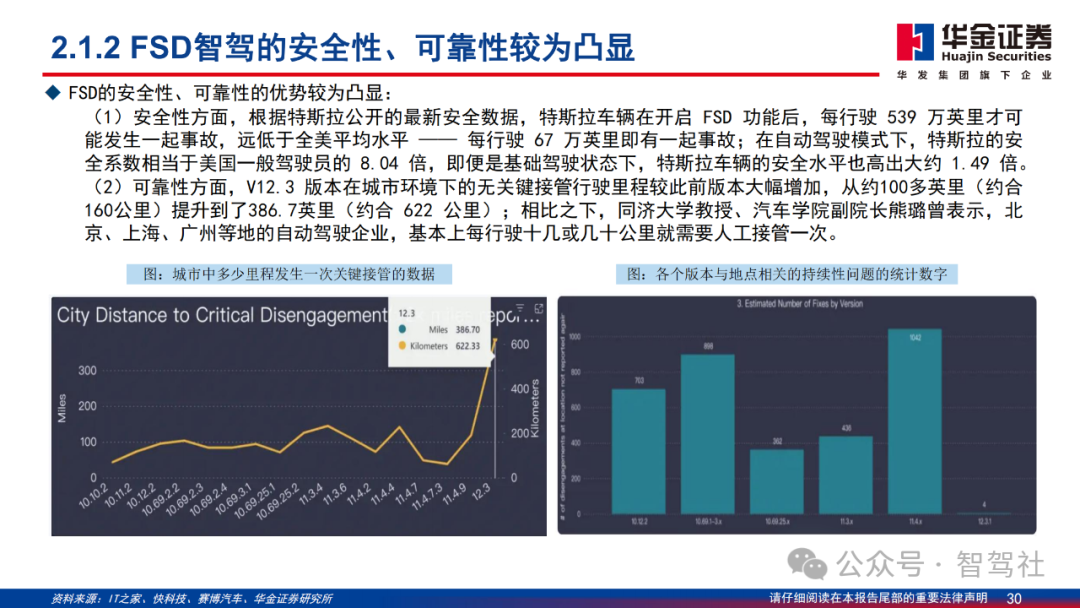
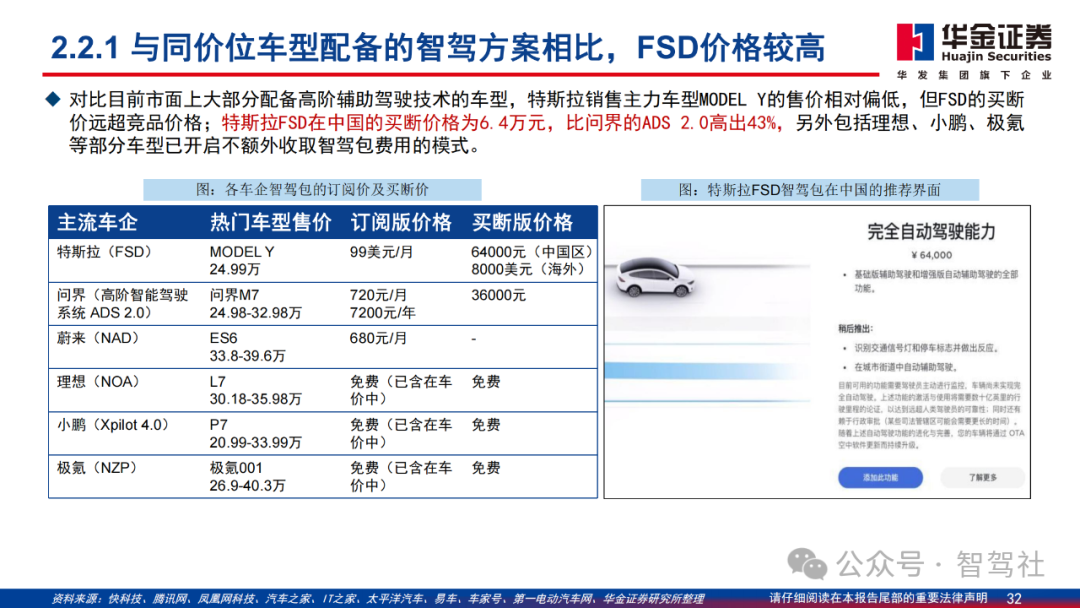
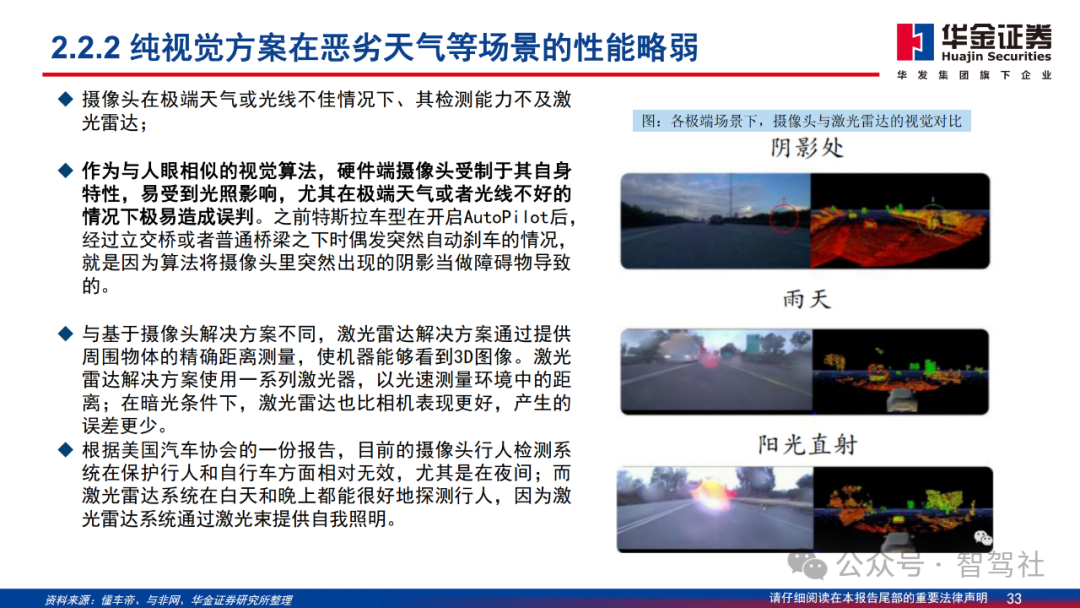
得益于数据量、算力投入、硬件适配度等方面的明显占优,特斯拉在依赖算力的纯视觉解决方案上遥遥领先国内厂商,FSD智驾拟人化程度高、安全性及可靠性更为凸显、且能有效节省运算空间及成本;但同时,FSD作为纯视觉方案在恶劣天气等场景下的性能较弱,其买断价也较国内市面上其他高阶辅助驾驶软件更高,或系特斯拉需改进的方面。
-
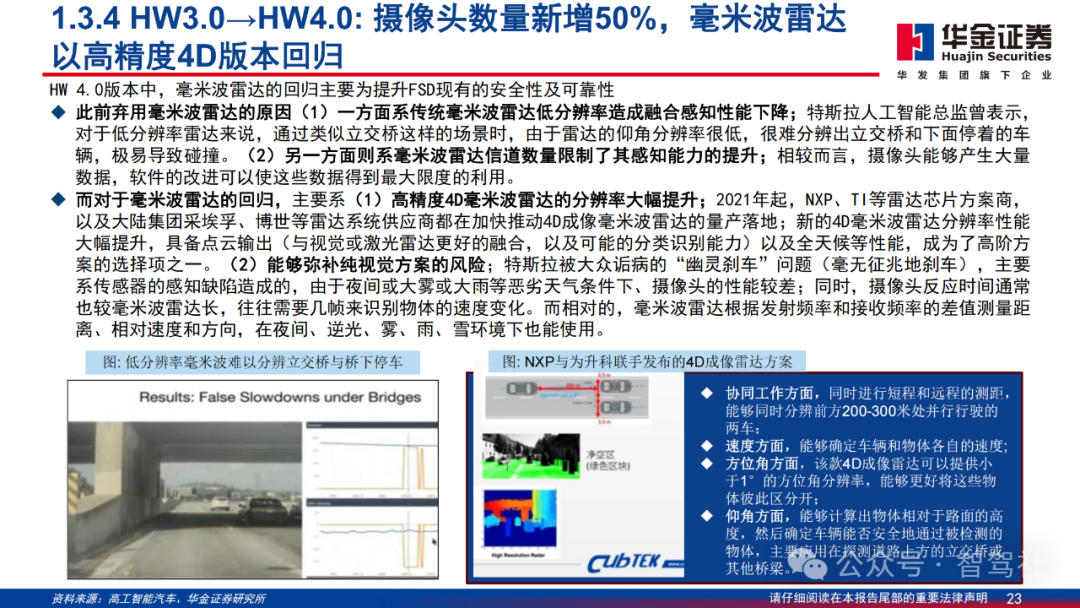
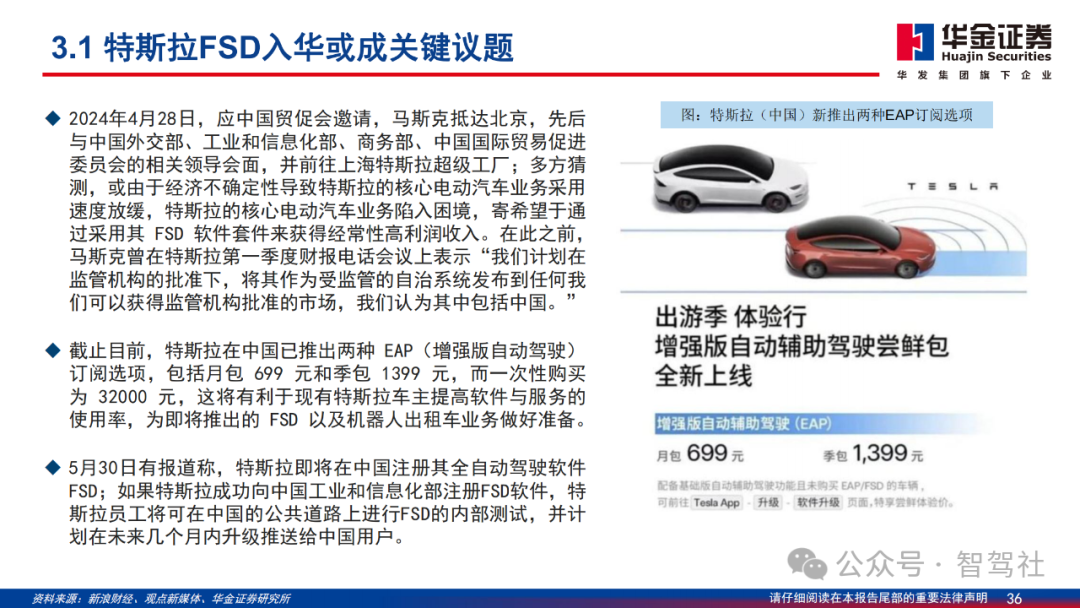
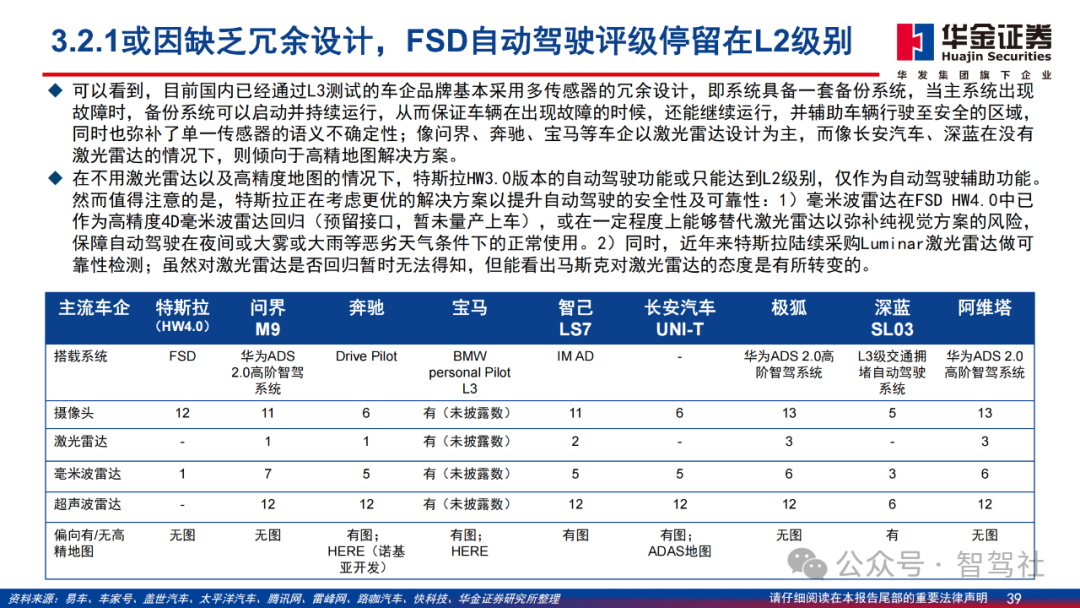
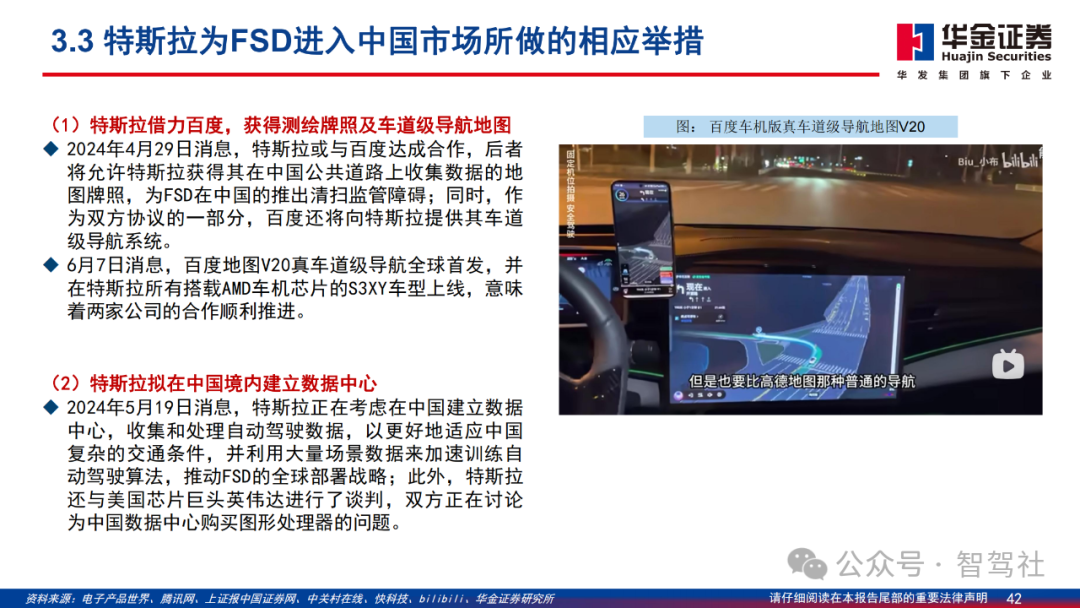
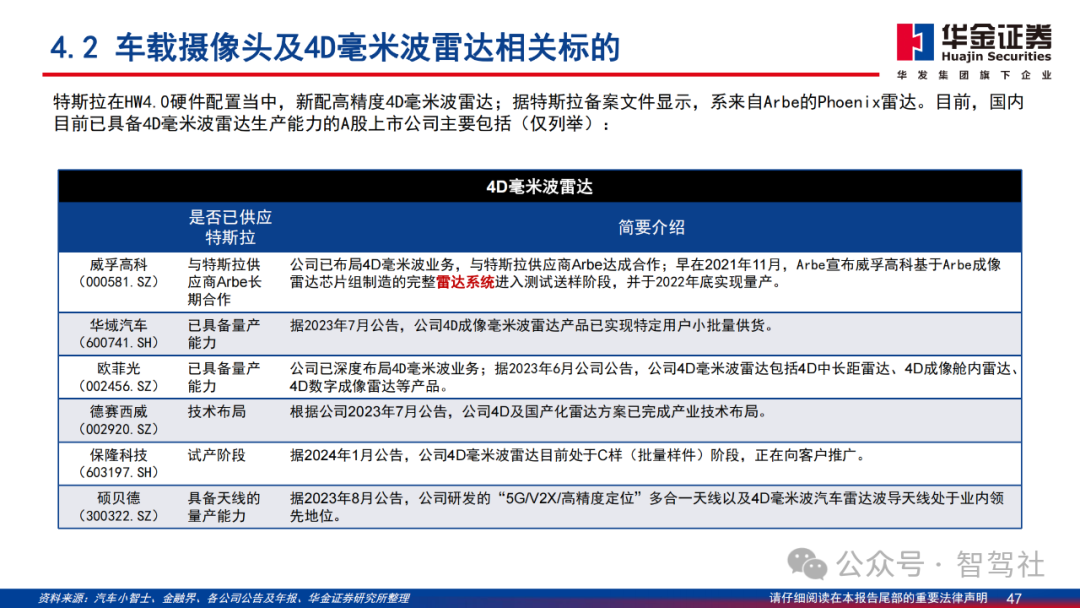
中国作为全球新能源汽车最大的市场,是各车企发展智驾的最优之选;然而,缺乏冗余设计或引发的驾驶安全问题、以及缺少测绘资质或带来的数据安全问题,均成为阻碍特斯拉入华的重要因素。硬件设计方面,特斯拉在HW4.0中重新加入高精度4D毫米波雷达,纯视觉方案的驾驶安全性问题或有望改善;数据安全方面,特斯拉则借力百度获得车道级导航地图,并拟在中国建立数据中心。截止2023年年底,特斯拉在中国市场的累计销量超过170万辆;假设FSD在现役中国特斯拉汽车中渗透率为5%-36%,预计新增收入54.4亿元-391.68亿元。










声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Guff_9hys/article/detail/775740
推荐阅读
相关标签

