
- 1【正点原子FPGA连载】第一章Hello World实验 摘自【正点原子】DFZU2EG_4EV MPSoC之嵌入式Vitis开发指南_xczu4ev-sfvc784-1-i 原理图
- 2PgSQL过程中遇到的查询效率过慢问题
- 3[Python进阶] WindowsAPI:pywin32_python win32api
- 4基于java springboot仓库管理微信小程序源码_java+ 微信小程序物资管理系统
- 5canvas导出图片python_Python连连看小游戏源代码
- 6Unity手机游戏开发:从搭建到发布上线全流程实战
- 7School StartsFirstProject~UnityVR(HTCVive设备开发)_htc vive unity开发
- 8如何在Pycharm中导入第三方库(以pyecharts为例子)
- 9图解云原生应用设计模式_云原生应用 开发模式
- 10linux ACL权限,设定,删除_/dev/shm添加acl权限
合作式智能运输系统-车用通信系统应用层及应用数据交互标准 第一阶段2020_csae 53-2020 合作式智能运输系统 车用通信系统 应用层及应用数据交互标准(第一阶
赞
踩
团体标准 合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第一阶段)
T/CASE 53-2020 代替T/CASE 53-2017
1 范围
本文件规定了合作式智能运输系统车用通信系统应用层的术语和定义,以及数据集和数据交互标准及接口规范等内容。
本文件适用于基于各种通信方式的车用通信系统应用场景开发、验证及商用。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件:不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 5768一2009 道路交通标志与标线
GB/T 16262.1一2006 信息技术抽象语法记法一 (ASN.1) 第1部分:基本记法规范
GB/T 16262.2一2006 信息技术抽象语法记法一(ASN.1) 第2部分:信息客体规范
GB/T 16262.3一2006 信息技术抽象语法记法一(ASN.1) 第3部分:约束规范
GB/T 16262.4-2006 信息技术抽象语法记法一(ASN.1)》 第4部分:ASN.1规范的参数化
GB/T 16263.2一2006 信息技术ASN.1编码规则 第2部分:紧缩编码规则(PER)规范
GB25280一2016 道路交通信号控制机
YD/T 3709一2020 基于LTE的车联网无线通信技术消息层技术要求
ETSI TS 102 637 智能交通系统 车辆通信系统 基本应用集(Intelligent Transportation Systems(ITS):Vehicular Communications:Basic Set of Applications)
SAE J2735 专用短程通信消息集字典(Dedicated Short Range Communications(DSRC)Message Set Dictionary)
SAEJ2945/1 V2V车载安全通信系统性能需求(0n-Board System Requirements for V2 V Safety Communications)
3 术语和定义
3.1 定义
下列术语和定义适用于本文件。
3.1.1 合作式智能运输系统cooperative intel ligent transportation systems,(C-ITS)
合作式智能运输系统是通过人、车、路信息交互,实现车辆和基础设施之间、车辆与车辆之间、车辆与人之间的智能协同与配合的一种智能运输系统。
3.1.2 系统延迟 system delay
从远车或路侧单元等设备发送通信数据后,到主车接收该数据并通过网络层进行信息处理后传递给应用层的时间。本文件中特指应用层端到端的延迟时间。
3.1.3 主车host vehicle,HW
装有车载单元且运行应用程序的目标车辆。
3.1.4 远车remote vehicle,R
与主车配合能定时广播V2X消息的背景车辆。
3.1.5 车载单元on-board unit,0BU
安装在车辆上的可实现V2X通信,支持V2X应用的硬件单元。
3.1.6 路侧单元road side unit,RSU
安装在路边的可实现V2X通信,支持V2X应用的硬件单元。
3.1.7 V2X
车载单元与其他设备通信,包括但不限于车载单元之间通信(V2V),车载单元与路侧单元通信(V2I),车载单元与行人设备通信(V2P),车载单元与网络之间通信(V2N)。
3.2 缩略语
下列缩略语适用于本文件。
4G:第四代移动通信技术(the4 th Generation mobile communication technology)
5G:第五代移动通信技术(the5 th Generation mobile communication technology)
ABS:制动防抱死系统(Anti-lock Braking System)
ADS:应用数据交换服务(Application Data-Exchange Service)
API:应用程序编程接口(Application Programming Interface)
ASN.l:抽象语法记法(Abstract Syntax Notation One)
AVW:异常车辆提醒(Abnormal Vehicle Warning)
BSM:基本安全消息(Basic Safety Message)
BSW:盲区预警(Blind Spot Warning)
CAV:防撞距离(Collision Avoidance Range)
CLW:车辆失控预警(Control Lost Warning)
CSAE:中国汽车工程学会(Society of Automotive Engineers of China)
C-ITS:中国智能交通产业联盟(China ITS Industry Alliance)
DE:数据元素(Data Element)
DF:数据帧(Data Frame)
DME:专用短程通信管理实体(DSRC Management Entity)
DNPW:逆向超车预警(Do Not Pass Warning)
DSM:专用短程通信短消息(DSRC Short Message)
DSRC:专用短程通信(Dedicated Short Range Communications)
DTI:到交叉口的距离(Distance-to-Intersection)
EBW:紧急制动预警(Emergency Brake Warning)
ESP:车身电子稳定系统(Electronic Stability Program)
ETC:电子不停车收费系统(Electronic Tol1 Collection)
ETSI:欧洲电信标准化协会(European Telecommunications Standards Institute)
EVW:紧急车辆提醒(Emergency Vehicle Warning)
FCW:前向碰撞预警(Forward Collision Warning)
GB:中国国家标准(Guo Biao(Nation Standard))
GLOSA:绿波车速引导(Green Light Optimal Speed Advisory)
GNSS:全球导航卫星系统(Global Navigation Satellite System)
GPS:全球定位系统(Global Positioning System)
HLN:道路危险状况预警(Hazardous Location Warning.)
HMI:人机交互界面(Human Machine Interface)
HV:主车(Host Vehicle)
ICW:交叉路口碰撞预警(Intersection Collision Warning)
ID:标识(Identification)
IS0:国际标准化组织(International Standards0 rganization)
ITS:智能交通系统(Intelligent Transportation Systems)
IVS:车内标牌(In-Vehicle Signage)
LCW:变道预警(Lane Change Warning)
LDW:车道偏离预警(Lane Departure Warning)
LTA:左转辅助(Left Turn Assistant)
LTE-V2X:基于LTE的车联网无线通信技术(LTE Vehicle to Everything)
NHTSA:美国高速公路安全管理局(National Highway Traffic Safety Administration)
OBU:车载单元(On-Board Unit)
P2P:点对点(Point to Point)
RSA:路侧单元发布的交通事件消息(Road Side Alert)
RSM:路侧单元消息(Road Side Message)
RSU:路侧单元(Road Side Unit)
RV:远车(Remote Vehicle)
SAE:美国汽车工程师学会(Society of Automotive Engineers)
SLW:限速预警(Speed Limit Warning)
SPAT:信号灯消息(Signal Phase and Timing Message)
SPI:服务提供者接口(Service Provider Interface)
SVW:闯红灯预警(Signal Violation Warning)
TC:目标分类(Target Classification)
TCS:牵引力控制系统(Traction Control System)
TJW:前方拥堵提醒(Traffic Jam Warning)
TTC:碰撞预计时间(Time-to-Collision)
TTI:到达交叉口预计时间(Time-to-Intersection)
UPER:非对齐压缩编码规则(Unaligned Packet Encoding Rules)
V2I:车载单元与路侧单元通信(Vehicle to Infrastructure)
V2P:车载单元与行人设备通信(Vehicle to Pedestrians)
V2V:车载单元之间通信(Vehicle to Vehicle)
V2X:车载单元与其他设备通信(Vehicle to Everything)
VIN:车辆识别码(Vehicle ID Number)
VNFP:汽车近场支付(Vehicle Near-Field Payment)
VRUCW:弱势交通参与者碰撞预警(Vulnerable Road User Collision Warning)
4 合作式智能运输系统车用通信系统
4.1 系统介绍
合作式智能运输系统车用通信系统,旨在通过智能运输系统各子系统之间的信息交互,实现道路安全、通行效率、信息服务等各类应用。为此,不同厂商车辆之间,以及这些车辆与其所能到达的区域范围内的道路基础设施之间,必须实现互联互通。本文件的目的,是通过定义信息交互的消息集、数据帧与数据元素,来实现车用通信系统在应用层的互联互通。
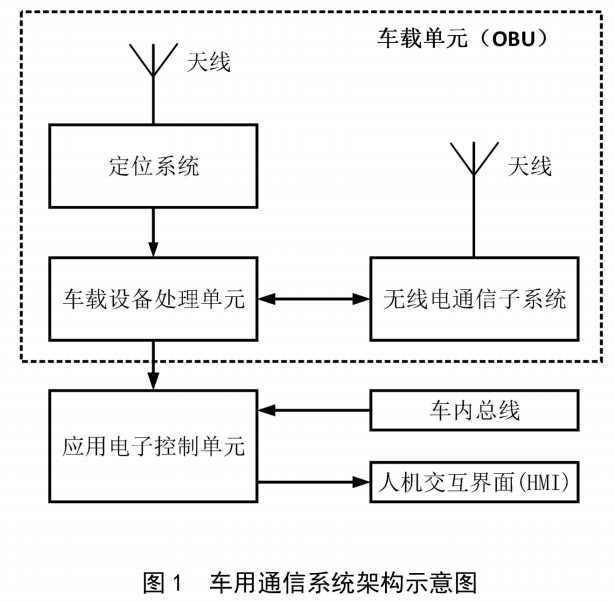
图1以车用通信系统中的车载单元(0BU)为例说明该系统的架构。车载设备通常包括了以下子系统:无线电通信子系统:接收和发送空中信号。一个车载设备里可以装配一个或者多个无线电通信子系统:
——定位系统:该子系统通常包含全球导航卫星系统(GNSS,Global Navigation Satellite System)接收器,用以提供车辆的位置、方向、速度和时间等信息。该子系统可以通过车速信号、惯性测量单元、差分定位系统等技术来实现增强定位:
——车载设备处理单元:运行程序以生成需要发送的空中信号,以及处理接收的空中信号;
——天线:实现射频信号的接收和发送。
车载设备通过接口与应用电子控制单元相连,应用电子控制单元中运行程序实现车用通信系统的应用,并通过人机交互界面(HMI,Human Machine Interface)来实现对驾驶员的提醒,包括图像、声音、振动等方式。在某些场合,应用电子控制单元和车载设备处理单元在一个物理设备中实现。
4.2 标准范围
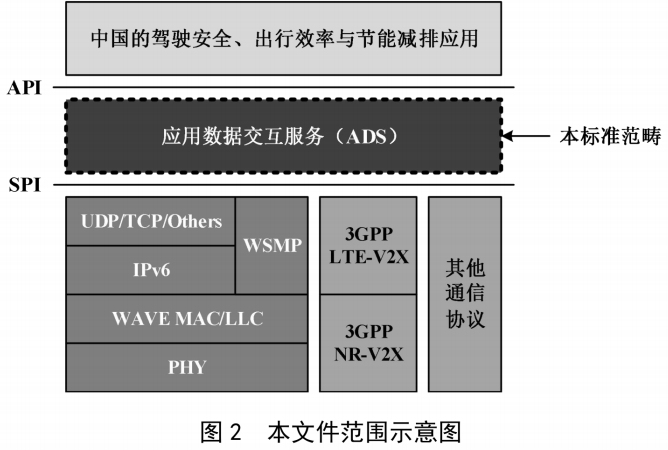
参考国际标准化组织(IS0)制定的通信系统七层参考模型,及美国、欧洲正在制定的车用通信系统相关标准的系统架构,车用通信系统通常可以分为系统应用、应用层、传输层、网络层、数据链路层和物理层。
本文件关注应用层及应用层与上下相邻两层的数据交互接口(如图2)。
应用层协议主要包括消息集和消息集内的数据帧与数据元素,以及消息的数据结构和编码方式。
本文件通过对道路安全、通行效率和信息服务等基础应用的分析,定义在实现各种应用时,车辆与其他车辆、道路交通设施及其他交通参与者之间的信息交互内容、交互协议与接口等。
本文件并不指定底层的通信技术,可以用于各种不同的传输层、网络层和数据链路层、物理层。
本文件通过向上制定与系统应用对接的应用编程接口(API),可以让不同的应用开发者独立开发能实现互联互通的应用,而无需担心使用何种通信方式或者通信设备,同时通过向下制定与不同通信设备对接的服务提供接口(SPI),以实现车用通信系统与不同通信方式或者通信设备的兼容,并满足通信技术不断更新的需求。
5 车用通信系统基础应用
5.1 需求分析
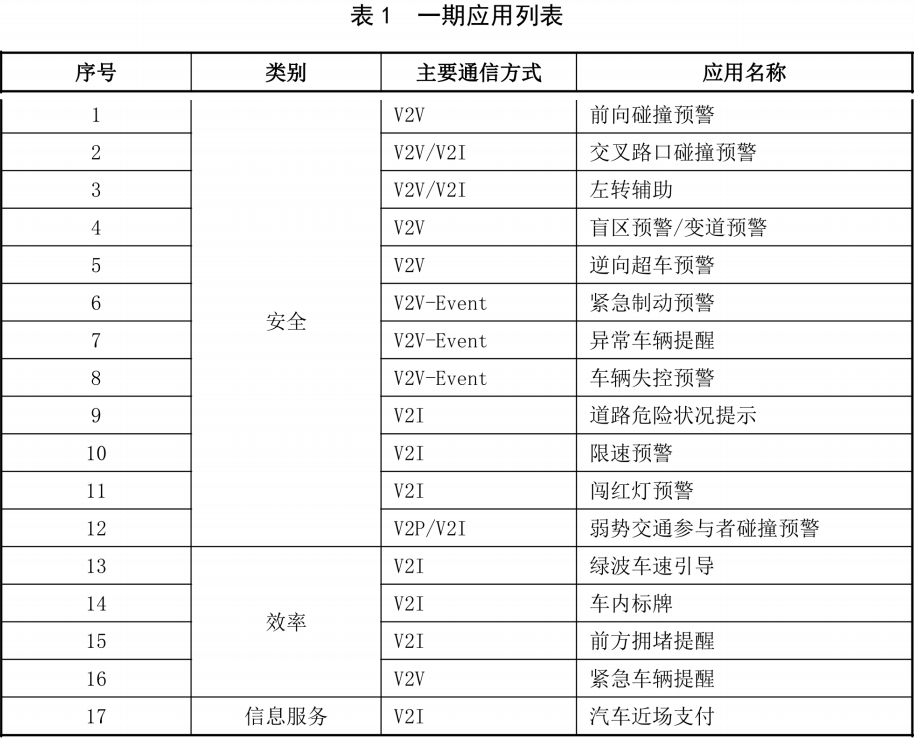
本文件选择涵盖安全、效率、信息服务三大类的17个典型应用作为一期应用。选择过程详见附录A。
表1为本文件选择的17个一期应用列表。
5.2 应用定义及基本要求
5.2.1总则
本节从应用定义、主要场景、系统基本原理、通信方式、基本性能要求和数据交互需求六个方面对17个一期应用分别进行描述,并根据各应用对通信频率和时延的不同需求,对应用进行分类(见附录B)。
5.2.2 前向碰撞预警
5.2.2.1 应用定义和预期效果
前向碰撞预警(FCW:Forward Collision Warning)是指,主车(HV)在车道上行驶,与在正前方同一车道的远车(RV)存在追尾碰撞危险时,FCW应用将对HV驾驶员进行预警。本应用适用于普通道路或高速公路等车辆追尾碰撞危险的预警。
FCW应用辅助驾驶员避免或减轻前向碰撞,提高道路行驶安全。
5.2.2.2 主要场景
FCW包括如下主要场景:
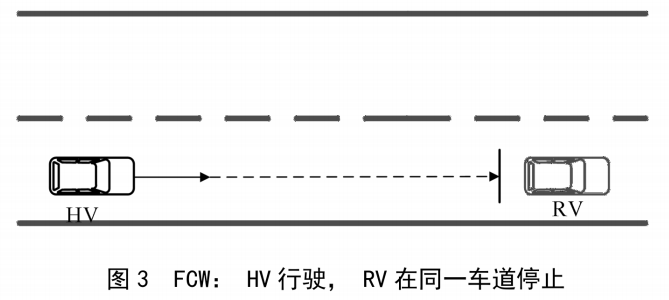
a)HV行驶,RV在HV同一车道正前方停止(图3):
1)HV正常行驶,RV在位于HV同一车道的正前方停止;
2)HV和RV需具备短程无线通信能力;
3)HV行驶过程中在即将与RV发生碰撞时,FCW应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的车辆RV存在碰撞危险;
4)预警时机需确保HⅣ驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。
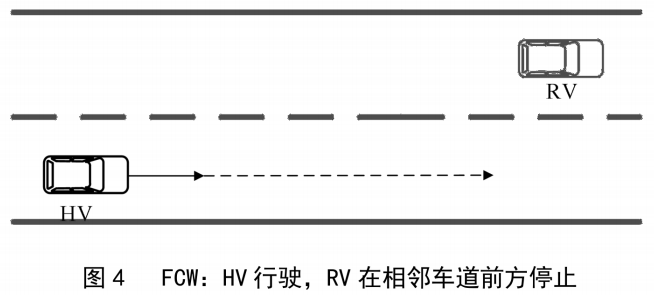
b)HV行驶,RV在HV相邻车道前方停止(图4):
1)HV正常行驶,RV在位于HV相邻车道的前方停止;
2)HV和RV需具备短程无线通信能力:
3)HV行驶过程中不会与RV发生碰撞,HV驾驶员不会收到FCW预警信息。
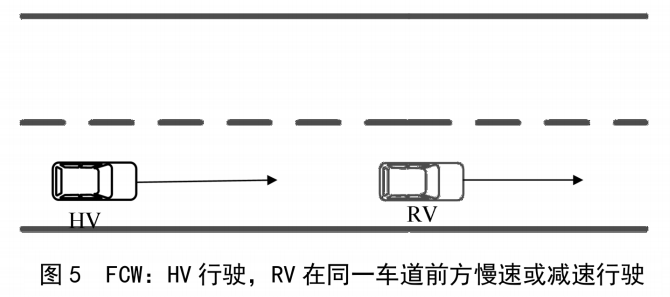
c)HV行驶,RV在HV同一车道正前方慢速或减速行驶(图5):
1)HV正常行驶,RV位于HV同一车道的正前方慢速或减速行驶;
2)HV和RV需具备短程无线通信能力:
3)HV行驶过程中在即将与RV发生碰撞时,FCW应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的车辆RV存在碰撞危险;
4)预警时机需确保V驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。
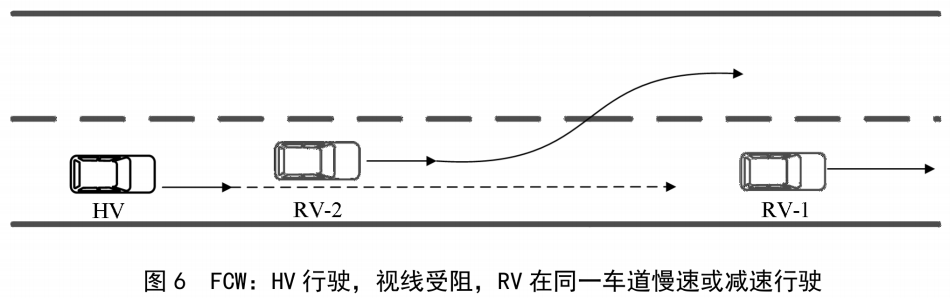
d)HV行驶,HV视线受阻,RV-1在HV同一车道正前方停止(图6):
1)HV跟随RV-2正常行驶,RV-1在同一车道上RV-2的正前方停止,HV的视线被RV-2所遮挡:
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)RV-2为了避开RV-1进行变道行驶;
4)HV行驶过程中在即将与RV-1发生碰撞时,FCW应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的RV-1存在碰撞危险;
5)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生追尾碰撞。
5.2.2.3 系统基本原理
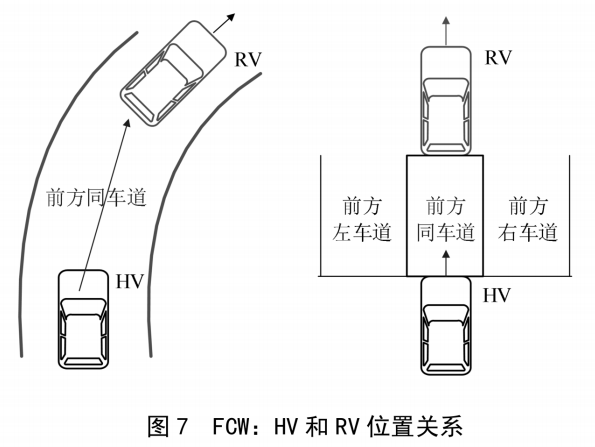
HV行驶过程中,若与同一车道前方RV存在碰撞危险时,FCW应用对HV驾驶员进行预警。触发FCW功能的HV和RV位置关系如图7,其中HV和RV在同一车道,RV在HV的前方。该应用在直线车道或者弯道车道均有效。
FCW基本工作原理如下:
——分析接收到的RV消息,筛选出位于同一车道前方(前方同车道)区域的RV:
——进一步筛选处于一定距离范围内的V作为潜在威胁车辆:
——计算每一个潜在威胁车辆碰撞时间(TTC:time-to-col1 ision)或防撞距离(collisionavoidance range),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威胁车辆,则筛选出最紧急的威胁车辆;
——系统通过HMI对HV驾驶员进行相应的碰撞预警。
5.2.2.4 通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.2.5 基本性能要求
FCW基本性能要求如下(指标依据参见附录C):
一一主车车速范围(0~130)km/h:
一一通信距离≥300m;
一一数据更新频率典型值10Hz;
一一系统延迟≤100ms;
——定位精度≤1.5m。
5.2.2.6 数据交互需求
FCW数据交互需求如表2。
表2 FCW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
5.2.3 交叉路口碰撞预警
5.2.3.1 应用定义和预期效果
交叉路口碰撞预警(ICW:Intersection Collision Warning)是指,主车(HV)驶向交叉路口,与侧向行驶的远车(RV)存在碰撞危险时,ICW应用将对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口、环道的入口、高速路入口等交叉路口的碰撞危险的预警。
ICW应用辅助驾驶员避免或减轻侧向碰撞,提高交叉路口通行安全。
5.2.3.2主要场景
ICW包括如下主要场景:
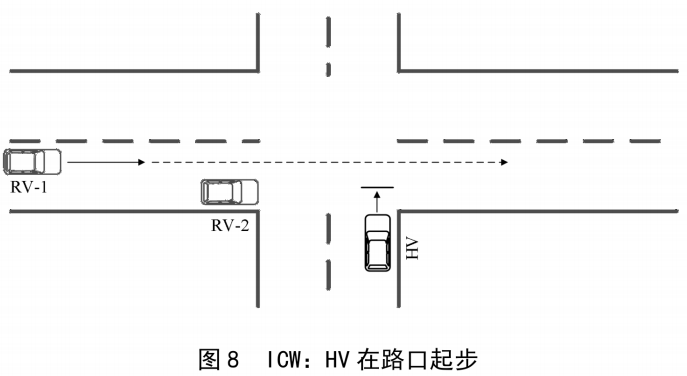
a)HV在路口起步(图8):
1)HV停止在路口,RV-1从HV左侧或右侧驶向路口,HV的视线可能被出现在路口的RV-2所遮挡;
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)HV启动并准备进入路口时,ICW应用对HV驾驶员发出预警,提醒驾驶员与侧向来车RV-1存在碰撞危险;
预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-1发生碰撞。
b)HV和RV同时驶向路口(图9):
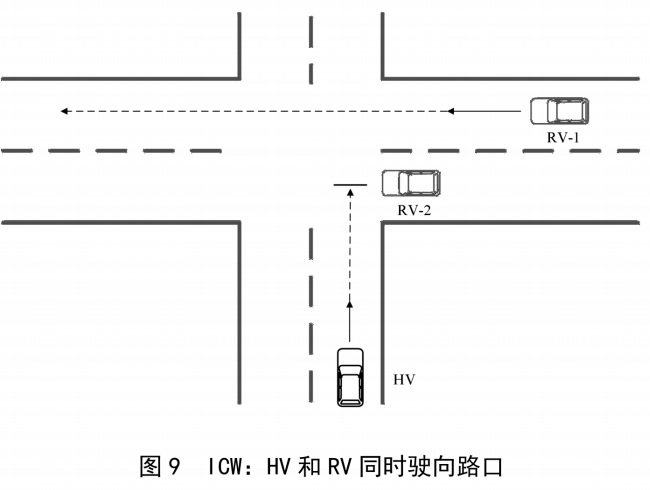
1)HV驶向路口,同时RV-1从V左侧或右侧驶向路口,V的视线可能被出现在路口的RV-2所遮挡;
2)HV和RV-1需具备短程无线通信能力,RV-2是否具备短程无线通信能力不影响应用场景的有效性;
3)当HV驶近路口时,ICW应用对HV驾驶员发出预警,提醒驾驶员与侧向来车RV-1存在碰撞危险:
4)预警时机需确保HV驾员收到预警后,能有足够时间采取措施,避免与RV-1发生碰撞。
5.2.3.3系统基本原理
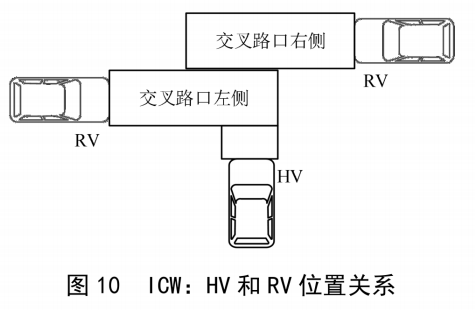
HV驶向交叉路口,若与任意一辆驶向同一路口的RV存在碰撞危险时,ICW应用对HV驾驶员进行预警。
触发ICW功能的HV和RV位置关系如图10,其中HV和RV行驶方向不限于垂直交叉(90°),可为一定范围内的多角度交叉。
ICW基本工作原理如下:
一一分析接收到的RV消息,筛选出位于交叉路口左侧(Intersecting Left)或交叉路口右侧(Intersecting Right)区域的RV。RV消息可能是由RV发出或从路侧单元获取;
——进一步筛选处于一定距离范围内的RV作为潜在威胁车辆;
——计算每一个潜在威胁车辆到达路口的时间(TTI:time-to-intersection)和到达路口的距离(DTI:distance–to-intersection),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威胁车辆,则筛选出最紧急的威胁车辆;
——系统通过HMI对HV驾驶员进行相应的碰撞预警。
5.2.3.4通信能力
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V);利用具备短程无线通信能力的路侧设备直接探测碰撞危险或远车信息,发送给主车(V2I)。
5.2.3.5基本性能要求
ICW基本性能要求如下:
一一主车车速范围(0~70)km/h:
——通信距离≥150m:
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.3.6数据交互需求
ICW数据交互需求如表3。
表3 ICW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
5.2.4左转辅助
5.2.4.1应用定义和预期效果
左转辅助(LTA:Left Turn Assist)是指,主车(HV)在交叉路口左转,与对向驶来的远车(RV)存在碰撞危险时,LTA应用将对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口。
LTA应用辅助驾驶员避免或减轻侧向碰撞,提高交叉路口通行安全。
5.2.4.2主要场景
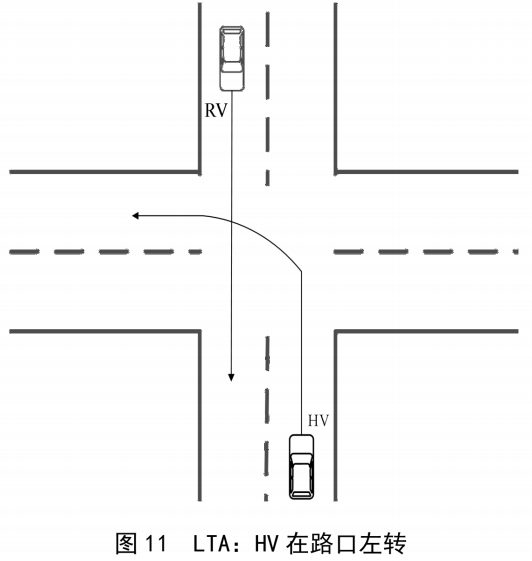
LTA的主要场景为,HV在交叉路口左转,RV从对面驶向路口(图11)。具体描述如下:
一一HV和RV同时从相对的方向驶向交叉路口;
一一HV和RV需具备短程无线通信能力;
——HV启动并准备进入路口左转时,若系统检测到与对向来车RV存在碰撞危险,LTA应用对HV驾驶员发出预警;
——预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
5.2.4.3系统基本原理
HV驶向交叉路口左转行驶时,若与对向行驶车辆RV存在碰撞危险,LTA应用对HV驾驶员进行预警。
触发LTA功能的HV和RV位置关系如图12.
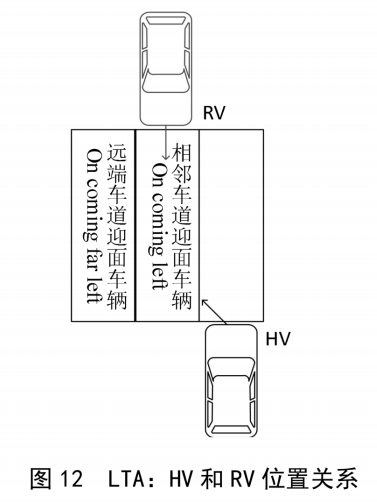
LTA基本工作原理如下:
——分析接收到的RV消息,筛选出位于HV相邻车道迎面车辆(oncoming left)和远端车道迎面车辆(oncoming far left)区域的RV;
一一进一步筛选处于一定距离范围内的V作为潜在威胁车辆:
一一计算每一个潜在威胁车辆到达路口的时间(TTI:time-to-intersection)和到达路口的距离(DTI:distance–to-intersection),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威胁车辆,则筛选出最紧急的威肋胁车辆;
——系统通过HMI对HV驾驶员进行相应的碰撞预警。
5.2.4.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V);利用具备短程无线通信能力的路侧设备直接探测碰撞危险或远车信息,发送给主车(V2I)。
5.2.4.5基本性能要求
LTA基本性能要求如下:
——主车车速范围(070)km/h;
——通信距离≥150m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.4.6 数据交互需求
LTA数据交互需求如表4。
表4 LTA数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
| 转向信号 | — | 左转向灯是否激活 |
5.2.5盲区预警/变道预警
5.2.5.1应用定义和预期效果
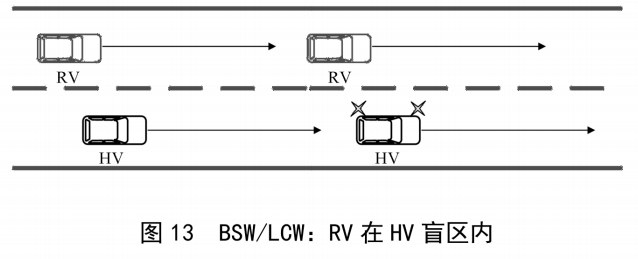
盲区预警/变道预警(BSw/LCW:Blind Spot Warning/Lane Change Warning)是指,当主车(HV)的相邻车道上有同向行驶的远车(RV)出现在HV盲区时,BSW应用对HV驾驶员进行提醒;当主车(HV)准备实施变道操作时(例如激活转向灯等),若此时相邻车道上有同向行驶的远车(RV)处于或即将进入HV盲区,LCW应用对HV驾驶员进行预警。本应用适用于普通道路或高速公路等车辆变道可能存在碰撞危险的预警。
BSW/LCW应用避免车辆变道时,与相邻车道上的车辆发生侧向碰撞,提高变道安全。
5.2.5.2 主要场景
BSW/LCW包括如下主要场景:
a)RV在HV盲区内(图13):
1)HV在本车道内行驶,RV在HV相邻车道内同向行驶,且RV处于HV盲区内:
2)BSW应用提醒HV驾驶员其盲区内存在车辆RV;
3)若此时检测到HV驾驶员有向RV所在车道变道的意图(例如激活转向灯或者根据方向盘转角综合判断),则LCW应用对HV驾驶员发出预警;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的RV发生碰撞。
b)RV即将进入HV盲区(图14):
1)HV在本车道内行驶,远车RV在相邻车道上与HV同向行驶,且即将进入HV的盲区:
2)BSW应用提醒HV驾驶员即将有车辆进入其盲区;
3)若此时检测到HV驾驶员有向RV所在车道变道的意图(例如激活转向灯),则LCW应用对HV驾驶员发出预警;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的RV发生碰撞。
5.2.5.3系统基本原理
当HV意图换道时,若检测到相邻车道上与HV同向行驶的车辆RV处于或即将进入HV盲区,BSW/LCW应用对HV驾驶员进行预警。触发BSW/LCW功能的HV和RV位置关系如图15。BSW/LCW应用适用于直道和弯道情形。
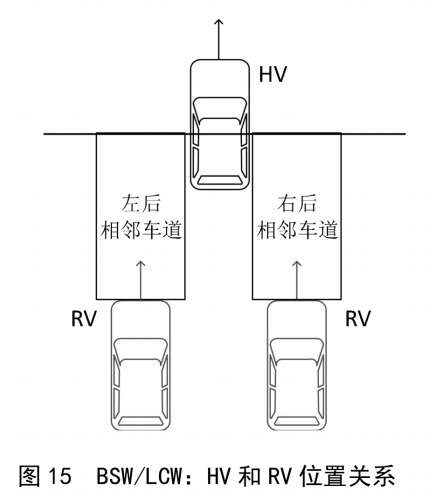
BSW/LCW基本工作原理如下:
——从接收到的RV消息中,筛选出位于HV左后相邻车道和右后相邻车道的RV作为潜在威胁车辆:
——判断潜在威胁车辆是否处于或即将进入HV盲区:
——如果潜在威胁车辆处于或即将进入HV盲区,首先对HV驾驶员进行BSW提醒;
——如果潜在威肋车辆处于或即将进入HV盲区,而Ⅳ此时有变道操作,则对HV驾驶员进行LCW报警:
——系统通过HMI对HV驾驶员进行提醒或报警。
5.2.5.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.5.5基本性能要求
BSW/LCW基本性能要求如下:
——主车车速范围(0~130)km/h;
——通信距离≥150m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms:
——定位精度≤1.5m。
5.2.5.6数据交互需求
BSW/LCW数据交互需求如表5。
表5 BSW/LCW:数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
| 转向信号 | — | 转向灯是否激活 |
| 方向盘转角 | deg | — |
5.2.6逆向超车预警
5.2.6.1应用定义和预期效果
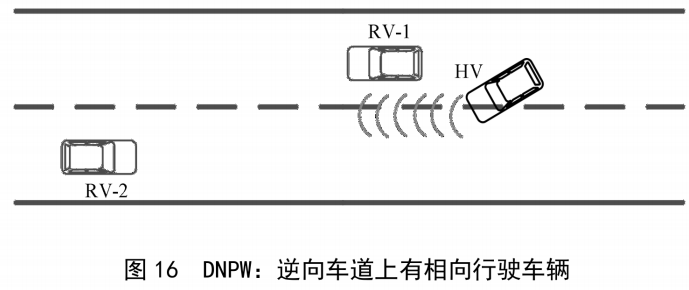
逆向超车预警(DNPW:Do Not Pass Warning)是指,主车(HV)行驶在道路上,因为借用逆向车道超车,与逆向车道上的逆向行驶远车(RV)存在碰撞危险时,DNPW应用对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路超车变道碰撞危险的预警。
DPW应用辅助驾驶员避免或减轻超车过程中产生的碰撞,提高逆向超车通行安全。
5.2.6.2主要场景
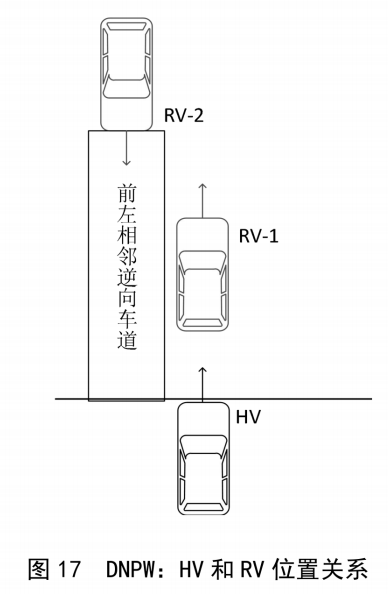
DNPW的主要场景为,HV逆向变道超车(图16)。具体描述如下:
——HV跟随RV-1行驶,HV准备超车,RV-2从相邻逆向车道上逆向行驶而来,HV的视线可能被RV-1遮挡;
——HV和RV-1、RV-2需具备短程无线通信能力;
——当HV打开变道转向灯并准备进入逆行车道时,DNPW应用对HV驾驶员发出预警,提醒驾驶员与逆向来车RV-2存在碰撞危险;
——预警时机需确保V驾驶员收到预警后,能有足够时间采取措施,避免与RV-2发生碰撞。
5.2.6.3系统基本原理
HV正常行驶过程中,打开转向灯准备变道时,若与相邻逆向车道上的远车RV-2存在碰撞危险,DNPW应用对HV驾驶员进行预警。触发DNPW功能的HV和远车RV-1、RV-2位置关系如图17。
DNPW基本工作原理如下:
——分析接收到的RV消息,筛选出位于HV左前方相邻逆向车道逆向行驶的RV:
——进一步筛选处于一定距离范围内的RV作为潜在威车辆:
——计算每一个潜在威胁车辆到达碰撞点的时间(TTC:time-to-col1 ision)和碰撞距离(DTC:distance-to-collision),筛选出与HV存在碰撞危险的威胁车辆;
——若有多个威肋车辆,则筛选出最紧急的威胁车辆;
——若发现HV主动进行变道超车动作,与逆向车道上的车辆碰撞条件成立,系统则通过MI对V驾驶员进行相应的碰撞预警。
5.2.6.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.6.5基本性能要求
DNPW基本性能要求如下:
一一主车车速范围(0~70)km/h;
——通信距离≥300m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.6.6数据交互需求
DNPW数据交互需求如表6。
表6 DNPW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
5.2.7紧急制动预警
5.2.7.1应用定义和预期效果
紧急制动预警(EBW:Emergency Brake Warning)是指,主车(HV)行驶在道路上,与前方行驶的远车(RV)存在一定距离,当前方RV进行紧急制动时,会将这一信息通过短程无线通信广播出来。HV检测到RV的紧急制动状态,若判断该RV事件与HV相关,则对HV驾驶员进行预警。本应用适用于城市郊区普通道路及高速公路可能发生制动追尾碰撞危险的预警。
EBW应用辅助驾驶员避免或减轻车辆追尾碰撞,提高道路行驶通行安全。
5.2.7.2主要场景
EBW包括如下主要场景:
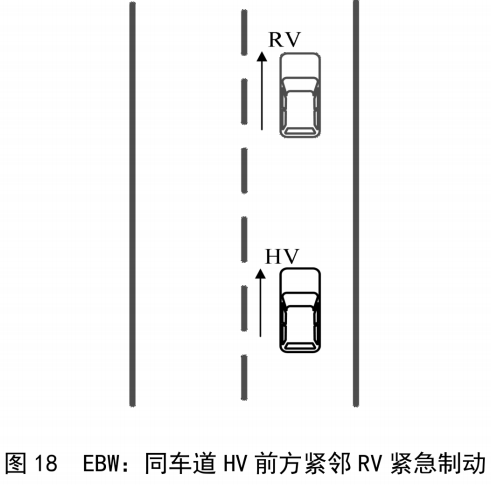
a)同车道(或相邻车道)HV前方紧邻RV发生紧急制动(图18):
1)HV行驶在道路上,RV发生紧急制动事件;
2)HV和RV需具备短程无线通信能力;
3)EBW应用对HV驾驶员发出预警,提醒驾驶员前方紧急制动操作存在碰撞危险;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。
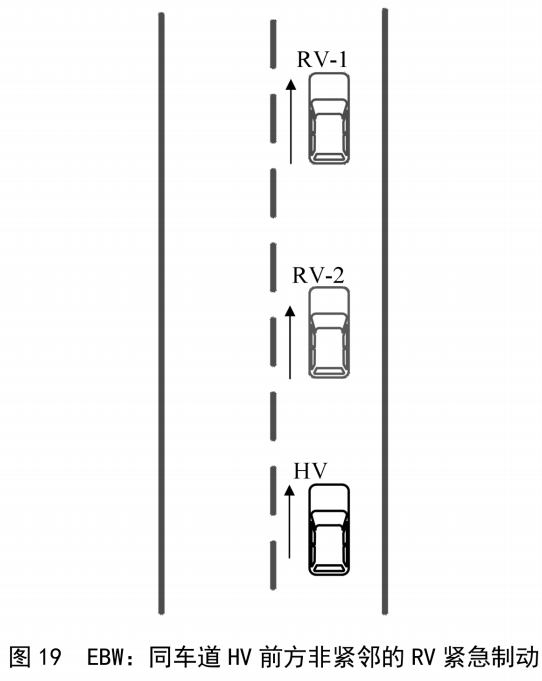
b)同车道(或相邻车道)HV前方非紧邻RV发生紧急制动(图19):
1)HV行驶在道路上,其前方非紧邻的RV-1发生紧急制动事件,HV的视线被紧邻的RV-2所遮挡;
2)HV和RV-1、RV-2需具备短程无线通信能力;
3)EBW应用对HV驾驶员发出预警,提醒驾驶员前方紧急制动操作存在碰撞危险;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV-2和RV-1发生追尾碰撞。
5.2.7.3系统基本原理
相同或者相邻车道上,RV出现紧急制动事件并对外广播,当EBW通过行驶方向、距离、位置、速度等信息,判断该事件对HV具有潜在危险时,则对HV驾驶员进行预警。触发EBW功能的HV和RV位置关系如图20。
EBW基本工作原理如下:
一一RV出现紧急制动事件时,将这一信息对外进行广播:
一一HV接收到的RV信息时,判断其是否包含紧急制动事件;
一一V将出现紧急制动事件的RV分类为前方相同车道和前方相邻车道;
——HV进一步根据车速、位置等信息判断该RV是否与HV相关,若存在潜在碰撞危险则对HV驾驶员进行提醒。
5.2.7.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.7.5基本性能要求
EBW基本性能要求如下:
——主车车速范围(0130)km/h;
——通信距离≥150m:
一一数据更新频率典型值10Hz;
一一系统延迟≤100ms:
——定位精度≤1.5m。
5.2.7.6数据交互需求
EBW数据交互需求如表7。
表7 EBW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 纵向加速度 | m/s2 | — |
| 紧急制动状态 | — | 是否激活 |
5.2.8异常车辆提醒
5.2.8.1应用定义和预期效果
异常车辆提醒(AVW:Abnormal Vehicle Warning.)是指,当远车(RV)在行驶中打开故障报警灯时,对外广播消息中显示当前“故障报警灯开启”,主车(HV)根据收到的消息内容,识别出其属于异常车辆;或者HV根据RV广播的消息,判断RV车速为静止或慢速(显著低于周围其他车辆),识别出其属于异常车辆。当识别出的异常车辆可能影响本车行驶路线时,AVW应用提醒V驾驶员注意。本应用适用于城市及郊区普通道路及公路的交叉路口、环道的入口、高速路入口等环境中的异常车辆提醒。
AVW应用辅助驾驶员及时发现前方异常车辆,从而避免或减轻碰撞,提高通行安全。
5.2.8.2主要场景
AVW包括如下主要场景:
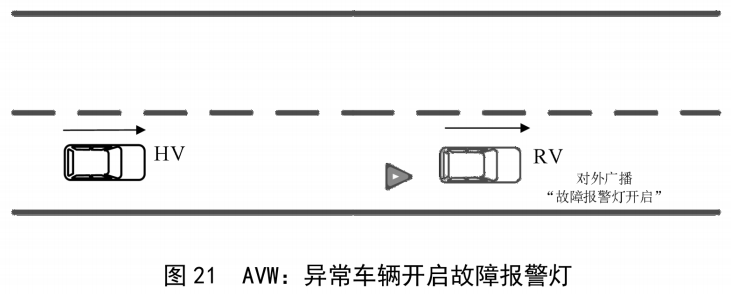
a)异常车辆开启故障报警灯(图21):
1)HV在道路上正常行驶,RV在HV前方相同或相邻车道内;
2)HV和RV需具备短程无线通信能力;
3)RV开启故障报警灯,并在对外广播的消息中携带“故障报警灯开启”信息,AVW应用对HV驾驶员发出预警,提醒驾驶员前方有异常车辆:
4)预警时机需确保HV驾驶员收到预警后,能由足够时间采取措施,避免与RV发生碰撞。
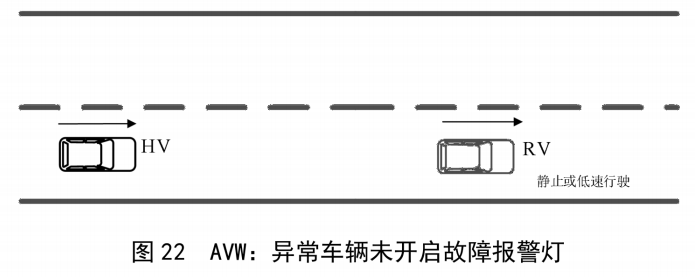
b)异常车辆未开启故障报警灯(图22):
1)HV在道路上正常行驶,RV在HV前方相同或相邻车道内;
2)HV和RV需具备短程无线通信能力;
3)RV为静止或者慢速车辆,在对外广播的消息中携带自身位置、速度、航向角等信息,HV根据这些信息判断RV为静止车辆或慢速车辆(车速显著低于周围其他车辆)。AVW应用对HV驾驶员发出预警,提醒驾驶员前方有异常车辆行驶;
4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
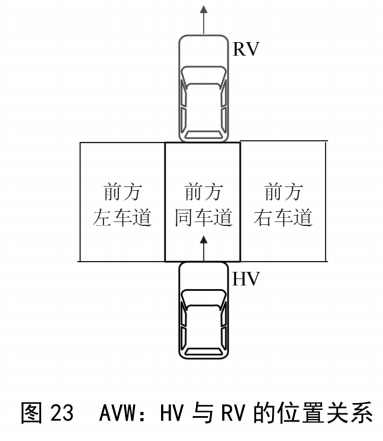
5.2.8.3系统基本原理
HV在道路上行驶,若收到前方RV发出的“故障报警灯开启”信息,或者分析RV发送消息中的速度、位置、航向角等信息,并结合其他RV车辆的车速信息,识别该RV车辆处于静止/慢速行驶的异常状态,若判断其与HV存在碰撞危险,则及时报警;若有多个威胁车辆,则筛选出最紧急的威胁车辆。触发AVW功能的HV和RV位置关系如图23。
5.2.8.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.8.5基本性能要求
AVW基本性能要求如下:
一一主车车速范围(0~130)km/h:
——通信距离≥150m;
——数据更新频率典型值10Hz;
——系统延迟≤100ms;
一一定位精度≤1.5m。
5.2.8.6 数据交互需求
AVW数据交互需求如表8。
表8 AVW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 速度 | m/s | — |
| 异常状态信息 | — | 远车"故障报警灯开启"信息、车辆静止或慢速行驶判断等 |
5.2.9车辆失控预警
5.2.9.1应用定义和预期效果
车辆失控预警(CLW:Control Loss Warning)是指,当远车(RV)出现制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发时,RV对外广播此类状态信息,若主车(HV)根据收到的消息识别出该车属于车辆失控,且可能影响自身行驶路线时,则CLW应用对HV驾驶员进行提醒。本应用适用于城市、郊区普通道路及高速公路可能发生车辆失控碰撞危险的预警。
CLW基于通信的终端,可以将车辆内部电控系统的功能触发/失控等信息,及时对外广播,便于周边车辆迅速采取避让等处置措施,避免由于某一车辆失控导致与周边车辆碰撞事故发生。
5.2.9.2主要场景描述
CLW包括如下主要场景:
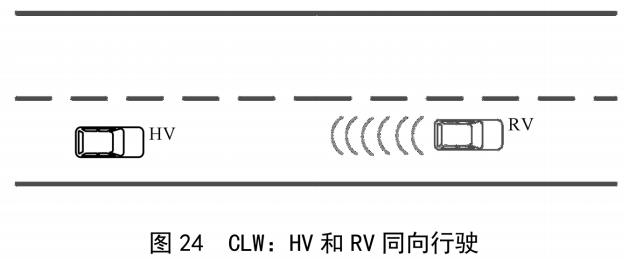
a)HV和RV同向行驶(图24)
1)HV和RV均具备短程无线通信能力;
2)HV和RV同向行驶,HV在RV的后方:
3)RV制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发;
4)RV广播车辆失控状态信息,HV接收信息,CLW应用对HV驾驶员发出预警,提醒驾驶员注意;
5)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
b)HV和RV相向行驶(图25):
1)HV和RV均具备短程无线通信能力;
2)HV和RV相向行驶,距离逐渐接近:
3)RV制动防抱死系统(ABS)、车身稳定性系统(ESP)、牵引力控制系统(TCS)、车道偏移预警系统(LDW)功能触发;
4)RV广播车辆失控状态信息,HV接收信息,CLW应用对HV驾驶员发出预警,提醒驾驶员注意;
5)预警时机需确保V驾驶员收到预警后,能有足够时间采取措施,避免与RV发生碰撞。
5.2.9.3系统基本原理
HV和RV同向行驶(不限于在同一车道内),若RV出现车辆失控预警且与后方HV存在碰撞危险时,CLW应用对HV驾驶员进行预警。HV和RV在相邻车道相向行驶,若RV在与HV会车前出现车辆失控,且与相向行驶的HV存在碰撞危险时,CLW应用对HV驾驶员进行预警。触发CLW功能的HV和RV的位置关系如图26(RV可位于HV前方车道的六个区域内)。
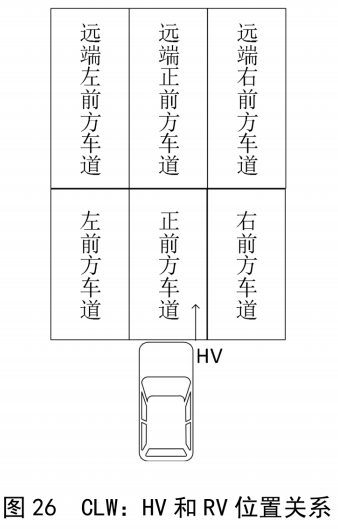
CLW基本工作原理如下:
——HV分析接收到的RV消息;
——计算出HV与RV的相对距离和发生碰撞的时间:
——系统通过MI对HV驾驶员进行相应的碰撞预警。
5.2.9.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.9.5基本性能要求
CLW基本性能要求如下:
一一主车车速范围(0~130)km/h;
一一通信距离≥300m;
——数据更新频率典型值10Hz;
一一系统延迟≤100ms;
——定位精度≤1.5m。
5.2.9.6数据交互需求
CLW数据交互需求如表9。
表9 CLW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 速度 | m/s | — |
| 加速度 | m/s2 | — |
| ABS状态 | — | Valid/invalid |
| ESP状态 | — | Valid/invalid |
| TCS状态 | — | Valid/invalid |
| LDW状态(左右) | — | Valid/invalid |
| 其他失控状态 | — | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
5.2.10道路危险状况提示
5.2.10.1应用定义和预期效果
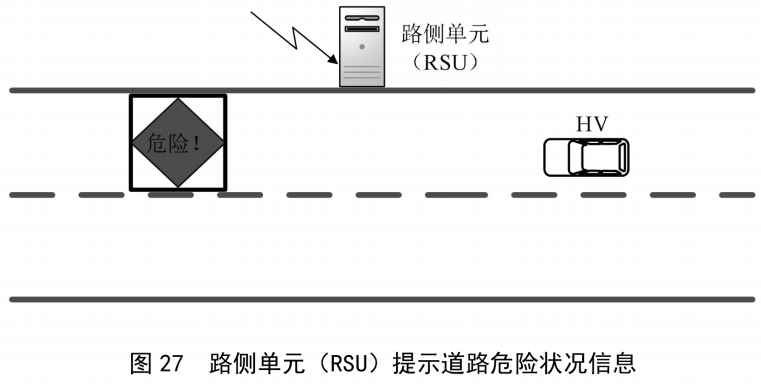
道路危险状况提示(HLW:Hazardous Location Warning)是指,主车(HV)行驶到潜在危险状况(如桥下存在较深积水、路面有深坑、道路湿滑、前方急转弯等)路段,存在发生事故风险时,HLW应用对V驾驶员进行预警。本应用适用于城市道路、郊区道路和高速公路等容易发生危险状况的路段或者临时性存在道路危险状况的路段。
HLW应用将道路危险状况及时通知周围车辆,便于驾驶员提前进行处置,提高车辆对危险路况的感知能力,降低驶入该危险区域的车辆发生事故的风险。
5.2.10.2主要场景
当道路存在危险状况时,附近路侧单元(SU)或临时路侧设备对外广播道路危险状况提示信息,包括:位置、危险类型、危险描述等,行经该路段的V根据信息及时采取避让措施,避免发生事故(图27)。
5.2.10.3系统基本原理
HLW基本工作原理如下:
一一具备短程无线通信能力的路侧单元(RSU)周期性对外广播道路危险状况提示信息:
一一HV依据自身位置信息和道路危险状况提示信息,计算与道路危险区域的距离;
一一HV依据当前速度计算到达道路危险区域的时间:
一一系统通过MI对驾驶员进行及时的预警。
5.2.10.4通信方式
HV和RSU需具备短程无线通信能力,RSU将道路危险状况信息发送给HV(V2I)。
5.2.10.5基本性能要求
HLW基本性能要求如下:
一一主车车速范围(0130)km/h:
——通信距离≥300m;
一一数据更新频率典型值5Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.10.6数据交互需求
HLW数据交互需求如表10。
表10 HLW数据交互需求(路侧数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 道路危险位置(经纬度) | deg | — |
| 道路危险位置(海拔) | m | — |
| 道路危险状况类型 | — | INTEGER |
| 道路危险状态描述 | — | STRING |
5.2.11 限速预警
5.2.11.1应用定义和预期效果
限速预警(SLW:Speed Limit Warning)是指,主车(HV)行驶过程中,在超出限定速度的情况下,SLW应用对HV驾驶员进行预警,提醒驾驶员减速行驶。本应用适用于普通道路及高速公路等有限速的道路。
SLW应用辅助驾驶员避免超速行驶,消除安全隐患,减少事故的发生。
5.2.11.2主要场景
HV和路侧单元(RSU)需具备短程无线通信能力。HV行驶时,RSU周期性发送特定路段的限速信息。
当HV判断自己在RSU指示的特定路段,且车速超过RSU的速度限制时,SLW应用对HV驾驶员发出预警,提醒驾驶员减速行驶。
5.2.11.3系统基本原理
SLW基本工作原理如下:
——HV分析接收到的RSU消息。提取限速路段信息和具体限速大小:
——根据车辆本身的定位和行驶方向,将自身定位到特定路段上:
——如果HV检测到自己处在限速路段区域内,则判断自身是否在限速范围内:
——如果不满足限速,则触发SLW报警。系统通过HMI对HV驾驶员进行相应的限速预警,提醒驾驶员减速。
5.2.11.4通信方式
HV和路侧单元(RSU)需具备短程无线通信能力,信息通过短程无线通信在路侧单元和HV之间传递(V2I)。
5.2.11.5基本性能要求
SLW基本性能要求如下:
一一主车车速范围(0~130)km/h:
——通信距离≥300m;
——数据更新频率典型值1Hz;
一一系统延迟≤100ms:
——定位精度≤1.5m
5.2.11.6数据交互需求
SLW数据交互需求如表11。
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| RSU经纬度 | deg | — |
| RSU海拔 | m | — |
| 限速区域范围 | — | — |
| 速度限制 | m/s | — |
5.2.12 闯红灯预警
5.2.12.1应用定义和预期效果
闯红灯预警(RLVW:Red Light Violation Warning)是指,主车(HV)经过有信号控制的交叉口(车道),车辆存在不按信号灯规定或指示行驶的风险时,RLW应用对驾驶员进行预警。本应用适用于城市及郊区道路及公路的交叉路口、环道的出入口和可控车道、高速路入口和隧道等有信号控制的车道。
闯红灯过程见图28。
RLVW应用辅助驾驶员安全通过信号灯路口,提高信号灯路口的通行安全。

5.2.12.2主要场景
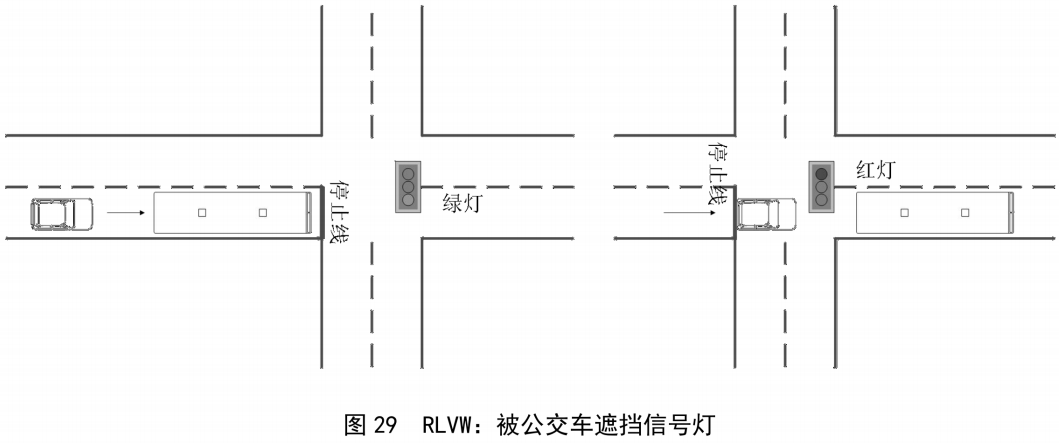
当前方有大车遮挡视线(图29)或恶劣天气影响视线,或由于其他原因,使HV无法对当前红灯或即刻到来的红灯做出正确判断时,RLW检测HV当前所处位置和速度等,通过计算预测车头经过路口停止线时信号灯的状态,并向驾驶员进行预警。
5.2.12.3系统基本原理
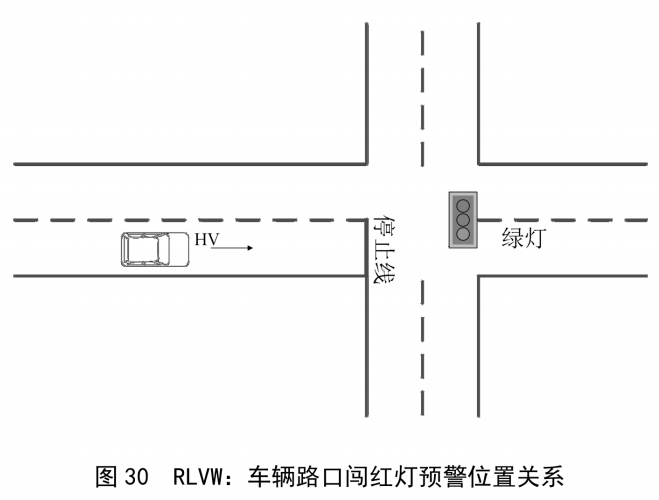
当V驶向具有信号控制的交叉路口(车道),遇信号灯即将变红或正处在红灯状态,但车辆未能停止在停止线内而继续前行时,RLVW应用将对该车驾驶员进行预警。触发RLVW功能的HV与路口设置位置关系如图30。
RLVW基本工作原理如下:
一一具有短程、远程通信能力的路侧单元(RSU)定时发送路口地理信息和信号灯实时状态信息:
一一HV依据本身GSS地理信息,确定当前受管控信号的相位,并计算其与停止线的距离;
一一HV依据当前速度和其他交通参数预估到达路口的时间;
一一LVW将这些信息与接收到的红灯切换时刻及红灯保留时长信息进行对比分析,决定是否预警。
5.2.12.4通信方式
具备短程、远程无线通信能力的路侧设备,将有关交叉口(车道)信息广播给具有短程通信能力的车辆(V2I)。
5.2.12.5基本性能要求
RLVW基本性能要求如下:
——主车车速范围(0~70)km/h;
——通信距离≥150m;
——数据更新频率典型值5Hz;
——系统延迟≤100ms;
——定位精度≤1.5m。
5.2.12.6数据交互需求
RLVW数据交互需求如表12。
表12 RLVW数据交互需求(路侧数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 路口ID | — | — |
| 入口ID | — | — |
| 车道宽度 | m | — |
| 车道中心线位置 | — | — |
| 停车线位置 | — | — |
| 车道属性 | — | 左、直、右和掉头 |
| 车道所属相位 | — | — |
| 当前灯态 | — | 针对该车道每一个车道属性(允许行驶方向)的信号灯状态 |
| 红灯变绿剩余时间/绿灯变红剩余时间 | s | 可预测一个周期或两个周期 |
| 红绿灯配时是否自适应控制 | — | 自适应控制时,绿灯剩余时间会改变(周期内或下一个周期) |
5.2.13弱势交通参与者碰撞预警
5.2.13.1应用定义和预期效果
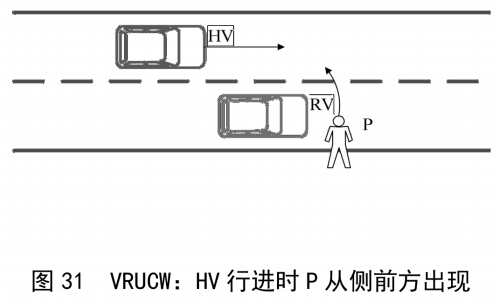
弱势交通参与者碰撞预警(VRUCW:Vulnerable Road User Collision Warning)是指,HV在行驶中,与周边行人(P,Pedestrian.。含义拓展为广义上的弱势交通参与者,包括行人、自行车、电动自行车等,以下描述以行人为例)存在碰撞危险时,VUCW应用将对车辆驾驶员进行预警,也可对行人进行预警。本应用适用于城市及郊区普通道路及公路的碰撞危险预警。
VRUCW)应用辅助驾驶员避免或减轻与侧向行人§碰撞危险,提高车辆及行人通行安全。
5.2.13.2主要场景
VRUCW包括如下主要场景:
a)HV行进时行人§从侧前方出现(图31):
1)HV在行进时,P从侧前方出现,HV的视线可能被出现在路边的RV所遮挡:
2)HV和P需具备短程无线通信能力,RV是否具备短程无线通信能力不影响应用场景的有效性;
3)HV接近P时,如果检测到可能发生碰撞的危险,VUCW应用对HV驾驶员发出预警,同时也可对P发出预警,提醒驾驶员与侧向P存在碰撞危险:
4)预警时机需确保HⅣ驾驶员收到预警后,能有足够时间采取措施,避免与P发生碰撞。
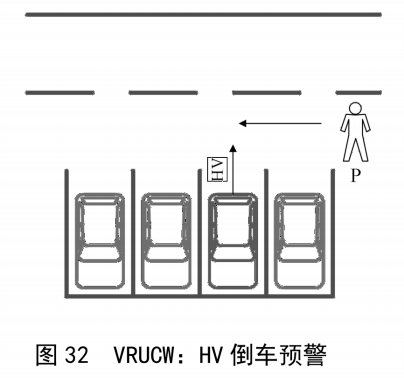
b)HV倒车预警(图32):
1)HV在倒车时,P从HV侧后方出现,HV的视线可能被两侧车辆遮挡,也可能由于是盲区等原因,使得HV的驾驶员不能及时发现:
2)HV和P需具备短程无线通信能力,周边RV是否具备该能力不影响预警效果;
3)HV接近P时,如果检测到可能存在碰撞的危险,VRUCW应用对HV驾驶员发出预警,也可以同时对P发出预警,提醒驾驶员这一危险:
4)预警时机需确保HⅣ驾驶员收到预警后,能有足够时间采取措施,避免与P发生碰撞。
c)通过路侧设备(I)检测行人并对车辆预警:
在场景)、b)的基础上,如果P不具备通信能力,路侧设备(I)可通过摄像头、微波雷达等传感器检测周边行人§,并广播行人§的相关信息,VRUCW)应用对可能发生碰撞的车辆驾驶员发出预警。
5.2.13.3 基本工作原理
VRUCW基本工作原理如下:
——HV分析接收到的行人§消息,筛选出与车辆行驶方向上可能发生冲突的行人;
——进一步筛选处于一定距离或者时间范围内的行人作为潜在威胁行人:
——计算与每一个(或者成组)行人的碰撞时间TTC(time-to-collision),筛选出存在碰撞威胁的行人:
——若存在多个威胁行人(或行人组),则筛选出最紧急的威胁行人(或行人组);
——系统对HV驾驶员进行相应的碰撞预警。
5.2.13.4通信方式
HV和P需具备短程无线通信能力,车辆信息通过短程无线通信在HV和P之间传递(V2P);或利用路侧感知系统对行人信息进行感知,通过路侧设备发给车辆(V2I)。
5.2.13.5 基本性能要求
VRUCW:基本性能要求如下:
一一主车车速范围(0~70)km/h;
——通信距离≥150m:
——信号更新频率典型值5Hz;
——系统延迟≤100ms;
一一定位精度≤1.5m。
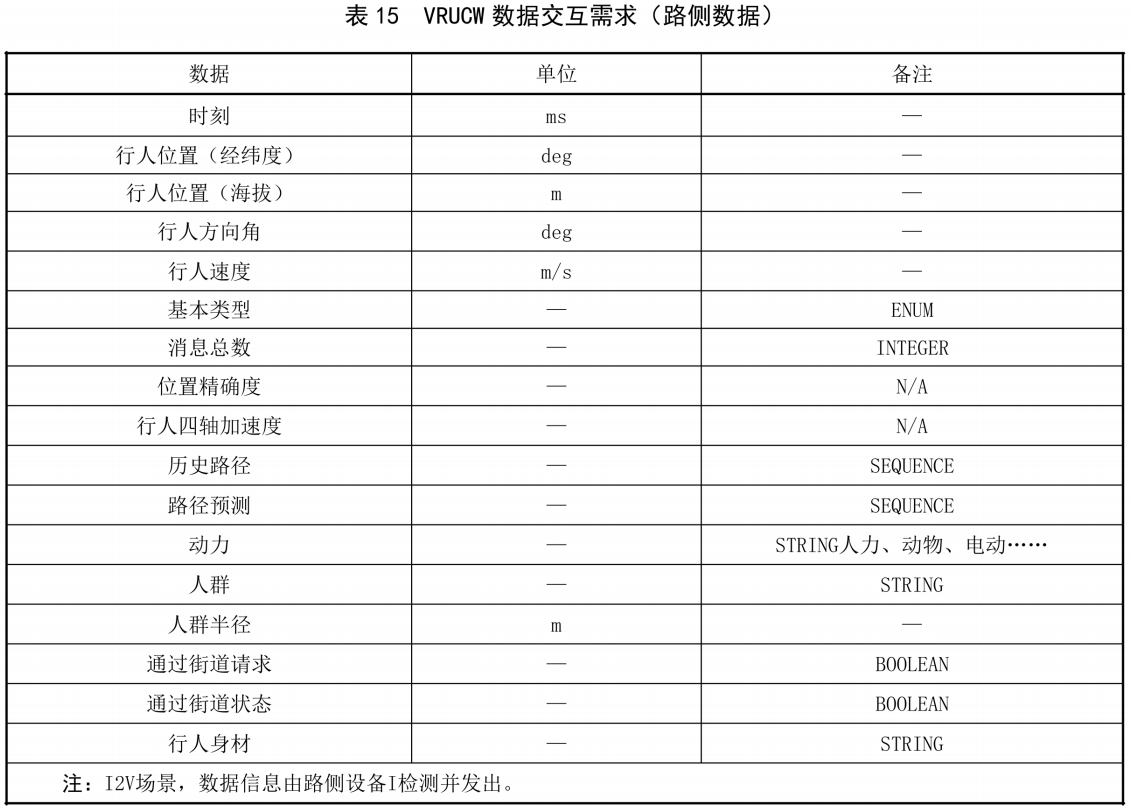
5.2.13.6数据交互需求
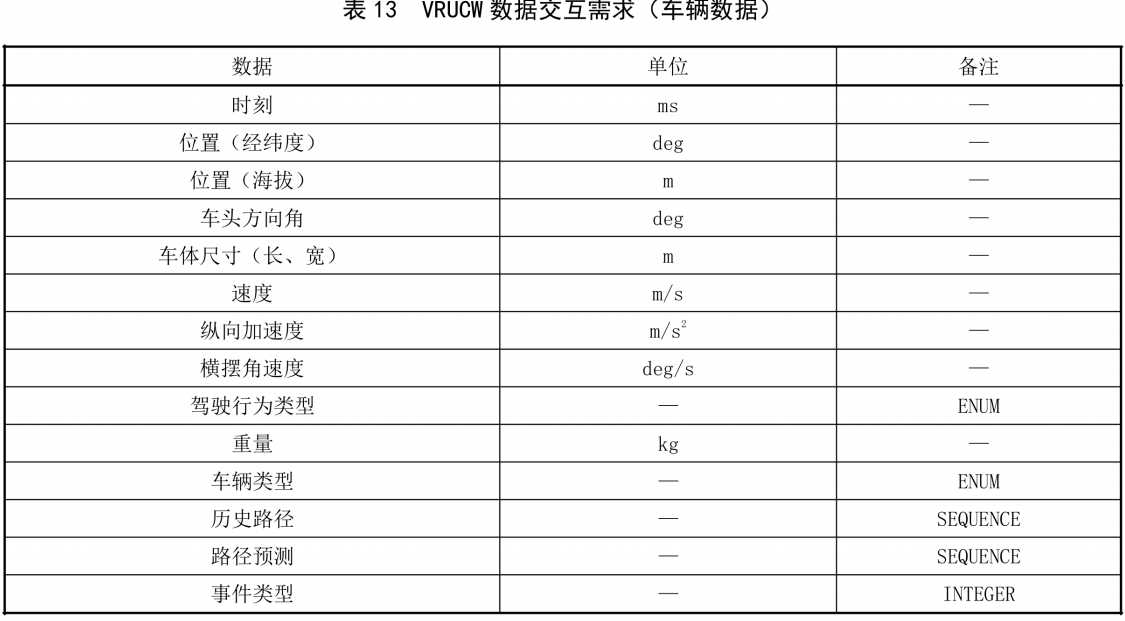
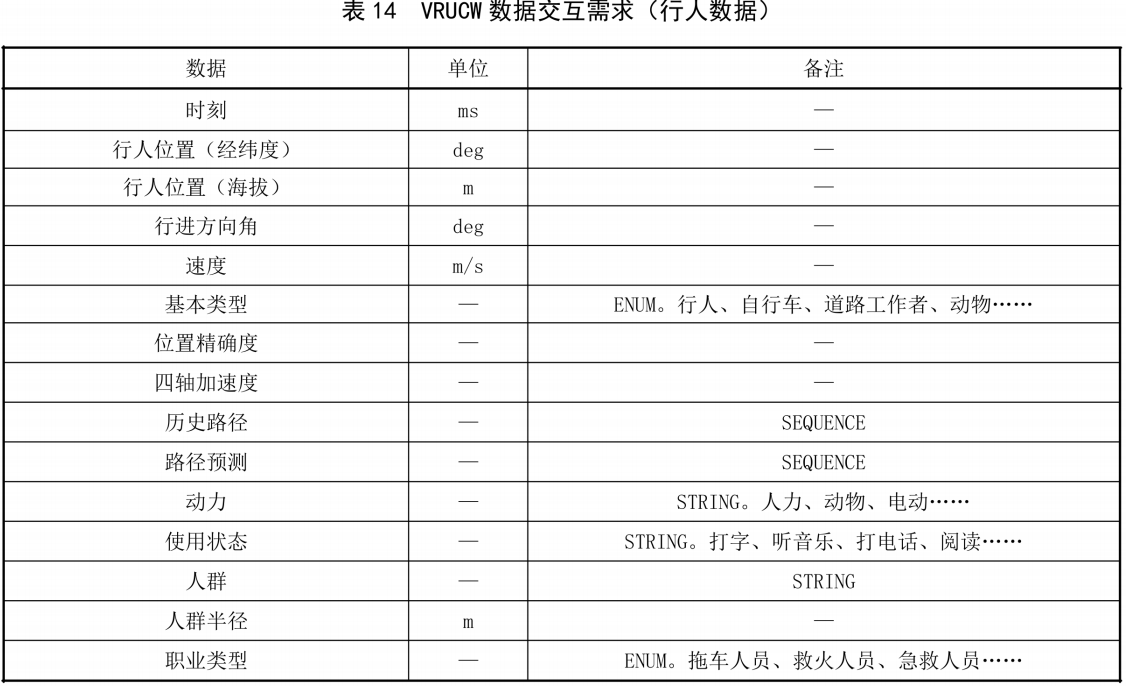
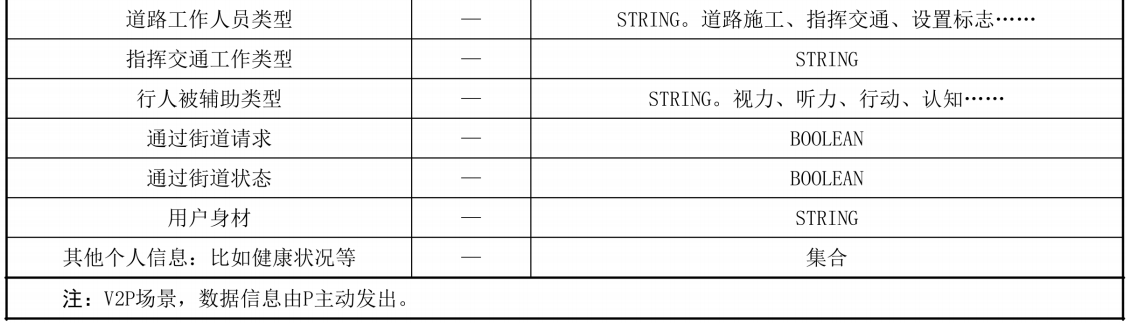
VRUCW数据交互需求如表13、表14、表15。
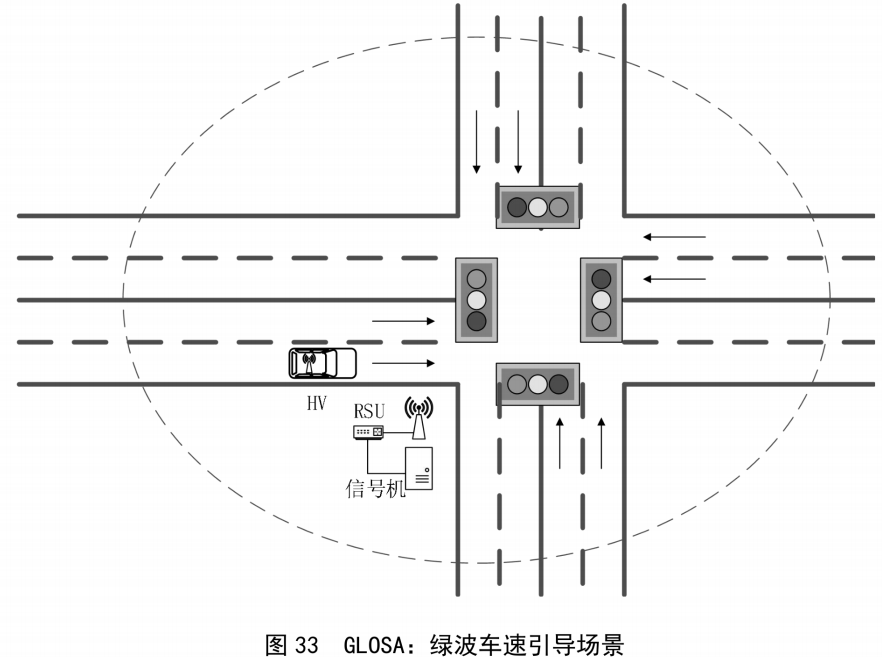
5.2.14绿波车速引导
5.2.14.1应用定义和预期效果
绿波车速引导(GLOSA:Green Light Optimal Speed Advisory)是指,当装载车载单元(OBU)的HV驶向信号灯控制交叉路口,收到由路侧单元(RSU)发送的道路数据及信号灯实时状态数据时,GLOSA应用将给予驾驶员一个建议车速区间,以使车辆能够经济地、舒适地(不需要停车等待)通过信号路口。
本应用适用于城市及郊区普通道路信号灯控制路口。
GLOSA应用能辅助驾驶应用,提高车辆通过交叉路口的经济性和舒适性,提升交通系统效率。
5.2.14.2主要场景
GL0SA主要场景见图33。具体描述如下:
——HV从远处接近信号灯控制路口;
——路侧通信设备发出局部道路数据信息及从路口信号机处获得的信号灯数据信息和实时状态信息;
——GL0SA应用根据上述信息,给出HV前方信号灯的实时状态,并结合HV的定位和行驶状态信息,计算出通过路口的引导车速区间。
5.2.14.3基本工作原理
GL0SA基本工作原理如下:
一一HV根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向;
——判断车辆前方路口是否有信号灯,提取信号灯对应相位的实时状态:若有信号灯信息,则可直接显示给驾驶员:
——GL0SA应用根据本车的位置,以及信号灯对应相位的实时状态,计算本车能够在本次或下次绿灯期间不停车通过路口所需的最高行驶速度和最低行驶速度,并进行提示。
5.2.14.4通信方式
具备短程无线通信能力的路侧设备,将道路数据与信号灯实时状态数据,发送给HⅣ(V2I)。
5.2.14.5基本性能要求
GL0SA为效率类V2X应用,适用于市区或郊区有信号控制路口的路网,该应用对定位精度和数据的实时性要求相较安全类应用为低。
GLOSA基本性能要求如下:
——车辆速度范围(0~70)km/h;
一一通信距离≥150m;
一一道路数据集更新频率典型值1Hz;
一一信号灯数据集更新频率典型值5Hz;
——系统延迟≤200ms;
——定位精度≤1.5m。
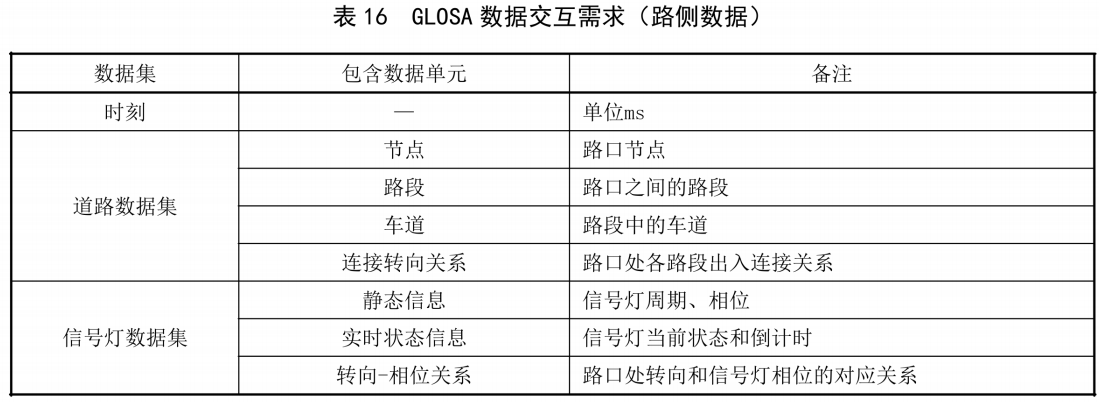
5.2.14.6数据交互需求
GL0SA数据交互需求如表16。
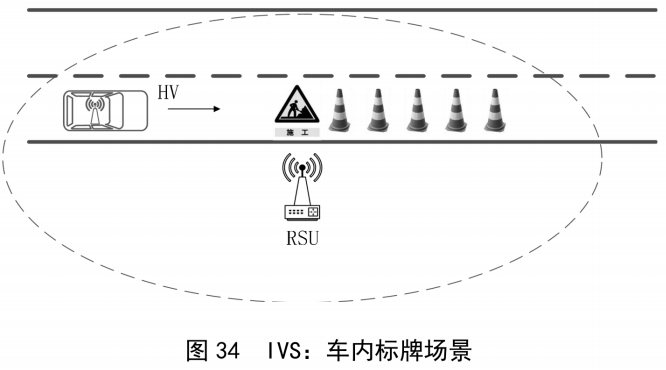
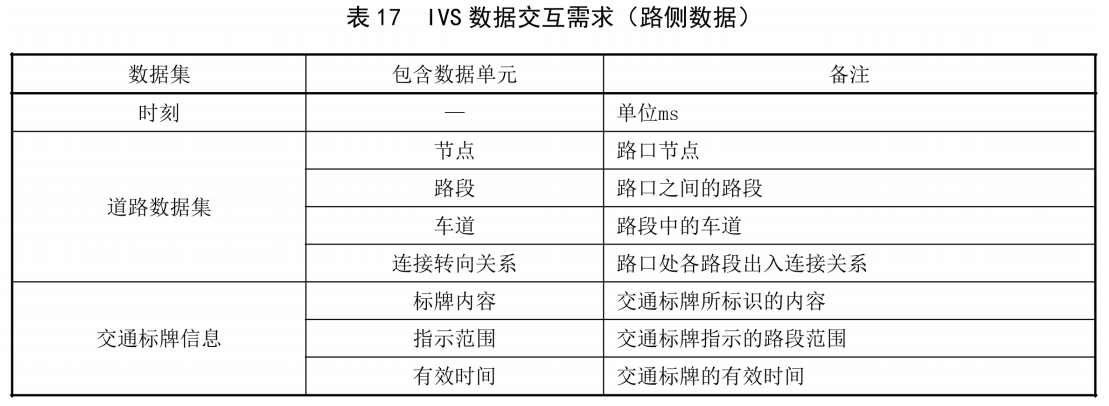
5.2.15车内标牌
5.2.15.1应用定义和预期效果
车内标牌(IVS:In-Vehicle Signage)是指,当装载车载单元(OBU)的HV收到由路侧单元(RSU)发送的道路数据以及交通标牌信息,IVS应用将给予驾驶员相应的交通标牌提示,保证车辆的安全行驶。
本应用适用于任何交通道路场景。
IVS能提高车辆行驶的安全性。
5.2.15.2主要场景
IVS的主要场景如图34。具体描述如下:
一一HV从远处接近相应的路侧单元(RSU):
——路侧通单元(RSU)发出局部道路数据信息,以及相应的交通标牌信息;
——IVS应用根据上述信息,结合自车的定位和行驶状态,计算出自车在路网中的位置,并判断前方是否有交通标识牌,如果有,则通过车内标牌对驾驶员进行提示。车内交通标牌会在消息有效的区域和时间段内亮起。
5.2.15.3基本工作原理
IVS基本工作原理如下:
——HV根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向:
——判断车辆前方道路是否有交通标牌,以及在当前时间段该标牌是否有效。若是,则直接显示给驾驶员。
5.2.15.4通信方式
具备短程无线通信能力的路侧设备,将道路数据与交通标牌信息,发送给HV(V2I)。
5.2.15.5基本性能要求
IVS基本性能要求如下:
——车辆速度范围(0~70)Km/h;
——通信距离≥150m;
——道路数据与交通标牌信息更新频率典型值1Hz;
——系统延迟≤500ms:
一一定位精度≤1.5m。
5.2.15.6数据交互需求
IVS数据交互需求如表17。
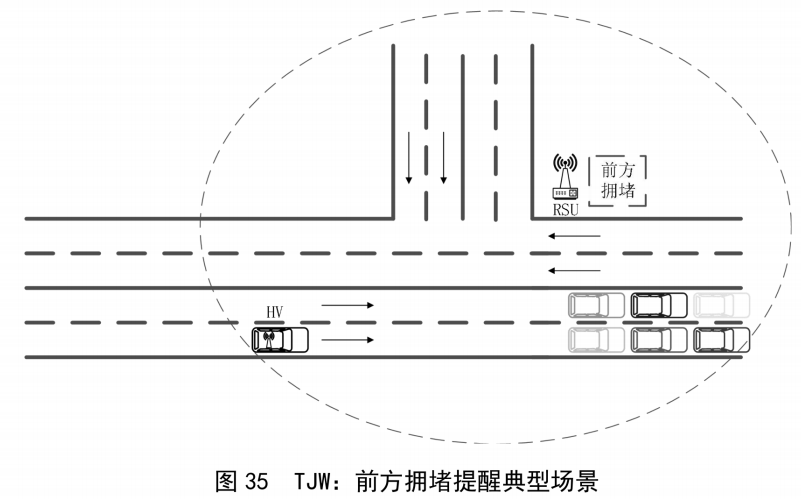
5.2.16 前方拥堵提醒
5.2.16.1应用定义和预期效果
前方拥堵提醒(TJW:Traffic Jam Warning)是指,主车(HV)行驶前方发生交通拥堵状况,路侧单元(RSU)将拥堵路段信息发送给HV,TJW应用将对驾驶员进行提醒。本应用适用于城市及郊区普通道路及高速公路拥堵路段的预警。
TJW应用提醒驾驶员前方路段拥堵,有助于驾驶员合理制定行车路线,提高道路通行效率。
5.2.16.2主要场景
TJW主要场景如图35。具体描述如下:
——HV从远处接近相应的路侧单元(RSU),路侧单元(RSU)周期性广播局部道路拥堵数据信息;
——TJW应用根据上述信息,结合本车的定位和行驶状态,计算出本车在路网中的位置,并判断前方是否有拥堵,如果有,则对驾驶员进行前方拥堵的提示。
5.2.16.3系统基本原理
TJW基本工作原理如下:
一一HV根据收到的道路数据,以及本车的定位和运行数据,判定本车在路网中所处的位置和运行方向;
——判断车辆前方道路是否有交通拥堵。若有,则直接提醒驾驶员。
5.2.16.4通信方式
具备短程无线通信能力的路侧设备(RSU),将直接探测到的拥堵信息,或将ITS系统中的拥堵路段信息,发送给V(V2I)。利用具备短程无线通信能力的车辆可将前方道路拥堵信息转发给后方车辆(V2V)。
5.2.16.5基本性能要求
TJW基本性能要求如下:
一一主车车速范围(0130)km/h;
一一通信距离≥150m;
——数据更新频率典型值1Hz;
——系统延迟≤500ms;
一一定位精度≤5m。
5.2.16.6数据交互需求
TJW数据交互需求如表18。
表18 TJW数据交互需求(路侧数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 拥堵起止点位置(经纬度) | Deg | 路侧设备周期性广播 |
| 拥堵程度 | — | 分为5级:畅通、基本畅通、轻度拥堵、中度拥堵、严重拥堵;路侧设备周期性广播 |
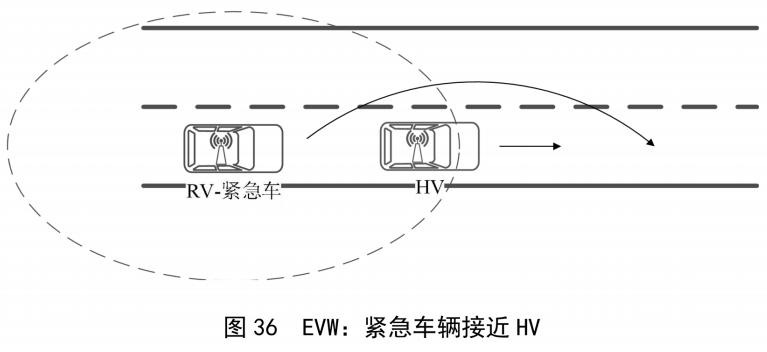
5.2.17紧急车辆提醒
5.2.17.1应用定义和预期效果
紧急车辆提醒(EVW:Emergency Vehicle Warning)是指,主车(HV)行驶中,收到紧急车辆提醒,以对消防车、救护车、警车或其他紧急呼叫车辆等进行让行。
EVW使HV实现对消防车、救护车、警车或其他紧急呼叫车辆的让行。
5.2.17.2主要场景
当紧急车辆接近HV时,提示HV让行的典型场景如图36。具体描述如下:
一一HV行驶中,紧急车辆RV接近HV:
——HV和RV需具备短程无线通信能力;
——HV收到紧急车辆提醒时,对紧急车辆RV进行让行。
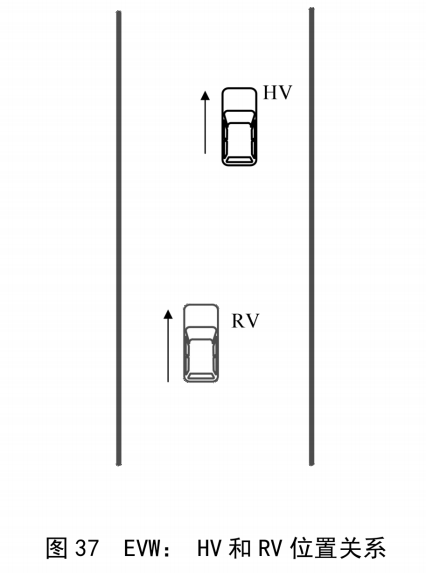
5.2.17.3系统基本原理
HV直向行驶时,遇到消防车、救护车、警车或其他紧急车辆呼叫时,通过车-车通信(V2V),能有效快速让行,EVW应用对HV驾驶员进行预警。触发EVW功能的HV和RV位置关系如37。
EVW基本工作原理如下:
——分析接收到的紧急车辆RV消息,筛选出位于HV受影响区域的紧急车辆RV;
——将处于一定范围内的紧急车辆RV作为优先让行紧急车辆;
——计算优先让行紧急车辆RV到达的时间和距离。
5.2.17.4通信方式
HV和RV需具备短程无线通信能力,车辆信息通过短程无线通信在HV和RV之间传递(V2V)。
5.2.17.5基本性能要求
EVW基本性能要求如下:
——主车车速范围(0~130)km/h;
——通信距离≥300m;
——数据更新频率典型值5Hz;
——系统延迟≤100ms;
——定位精度≤1.5m
5.2.17.6数据交互需求
EVW数据交互需求如表19。
表19 EVW数据交互需求(远车数据)
| 数据 | 单位 | 备注 |
|---|---|---|
| 时刻 | ms | — |
| 位置(经纬度) | deg | — |
| 位置(海拔) | m | — |
| 车头方向角 | deg | — |
| 车体尺寸(长、宽) | m | — |
| 速度 | m/s | — |
| 三轴加速度 | m/s2 | — |
| 横摆角速度 | deg/s | — |
| 紧急车辆类型 | 消防车、救护车、警车等 | — |
5.2.18汽车近场支付
5.2.18.1应用定义和预期效果
汽车近场支付(VNFP,Vehicle Near-Field Payment)是指,汽车作为支付终端对所消费的商品或服务进行账务支付的一种服务方式。汽车通过V2X通信技术与路侧单元(RSU作为受理终端)发生信息交互,间接向银行金融机构发送支付指令,产生货币支付与资金转移行为,从而实现车载支付功能。其主要应用包括ETC、拥堵费、充电支付、停车支付、加油支付等汽车使用消费环节的付费需求。
汽车将成为金融支付终端,具备车载支付能力,在智能交通各应用场景下,有效加速相关付费过程的效率与执行准确性。在停车支付、ET℃场景,通过收费单元与汽车的有效自动化联动,可以加速车流,提高交通效率;在未来电动车无线充电场景,可以解决根据充电量实时支付费用的问题,并因无需操作充电枪而提升用户体验;在购买车辆保险场景,可以根据本车实时车况数据直接完成汽车保险购买,实现车险个性化定价,提高商业服务质量。
5.2.18.2主要场景
WNFP包括如下主要场景:
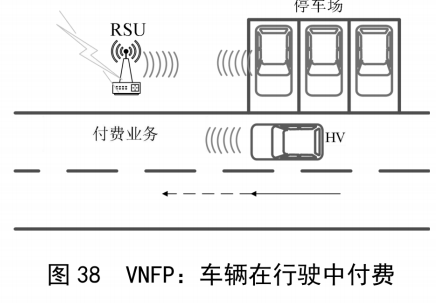
a)车辆在行驶中付费(如ETC、拥堵费,由有公信力商户主动扣款)(图38):
1)HV在道路上,驶过收费路侧单元(RSU);
2)路侧单元(RSU)广播收费站收费能力;
3)HV接受到收费站广播的收费能力,与路侧单元(RSU)完成P2P单播通信会话,并反馈车辆信息,如车辆识别码、车类型、车尺寸、车速及支付账户信息等:
4)路侧单元(RSU)完成支付扣款,并通知车辆。
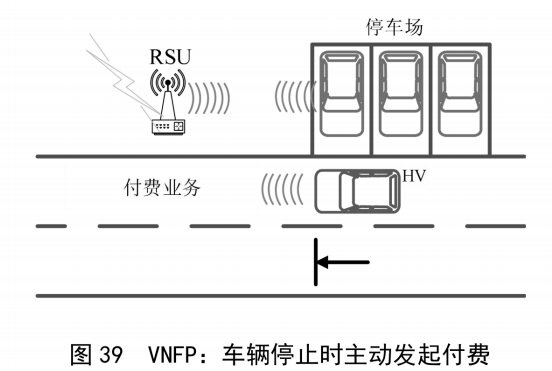
b)车辆停止时主动发起付费(停车场支付、充电支付、加油支付)(图39):
1)车辆停止时,向路侧单元(RSU)发起支付请求,并上送车辆信息,如车辆识别码、车类型、车尺寸及支付账户信息等;
2)路侧单元(RSU)完成支付扣款,并通知车辆。
5.2.18.3系统基本原理
图40为典型的车辆在行驶中付费的支付流程。首先是路侧单元(RSU)广播“我是收费站”,然后车载单元(OBU)应答相应汽车信息(包括汽车车辆标识、汽车类型、车速、车辆尺寸等),并建立起P2P通信连接。再后,RSU立刻发送相应支付请求信息(包括RSU标识、RSU地理位置信息、支付金额等),OBU收到RSU支付请求后,内部在金融支付计算单元进行处理后,再发出应答支付信息(包括支付账户、支付金额、支付密钥等)。SU收到支付应答信息后,进行内部收费处理,其中包括对支付账户的风险性检测,以及实时与后台系统交易确认(可选),如是否为黑名单账户,是否符合合法交易条件(如是否A品牌车在B品牌车4S店消费),最后RSU向OBU通知扣款(此时可选择传输电子发票等凭据),OBU做相应记录并结束通信。
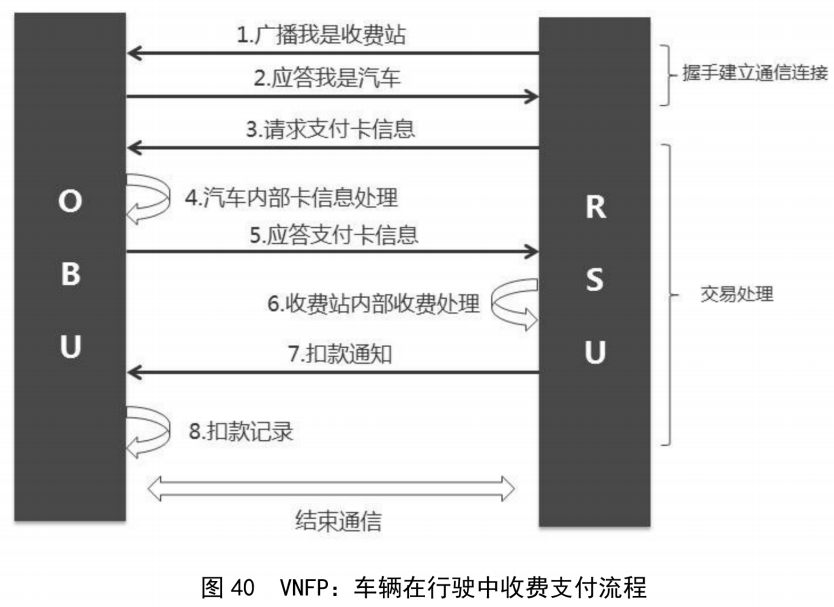
其中,SU支付金额由汽车类型与尺寸大小等车辆信息决定,车辆识别码、车辆类型与尺寸等形成汽车设备指纹,明确支付对象,以便在后续纠纷时明确责任主体。在超速交通罚款场景中,通过车辆上送车速信息,辅助证明超速行为。
通过以上交易逻辑分析,前7个交易步骤必须在联网通信时完成,因此假设每步骤时延为T,最大通信距离为D,最大车速为V,则需满足7×T×V≤D。参考ETSI TR102638的参数设定,当T=500ms,D=150m,V=130km/h时,满足以上要求。
5.2.18.4通信方式
路侧单元(RSU)具备短程无线通信能力,通过I2V的方式将支付场景(如ETC、交通罚款)的支付服务和活动状态进行广播,随后接入服务的HV与路侧单元(RSU)建立P2P单播会话,完成相应电子支付流程。
HV需具备短程无线通信能力,通过V2I的方式将支付请求发送给接收路侧单元(RSU),随后与路侧单元(RSU)建立P2P单播会话,完成相应电子支付流程。
5.2.18.5基本性能要求
VNFP基本性能要求如下:
——主车车速范围(0~130)km/h;
——通信距离≥150m;
——数据更新频率典型值1Hz;
——系统延迟≤500ms;
——为满足金融消费级安全等级,需要在V2X设备内嵌符合金融安全要求的设备或模拟程序。
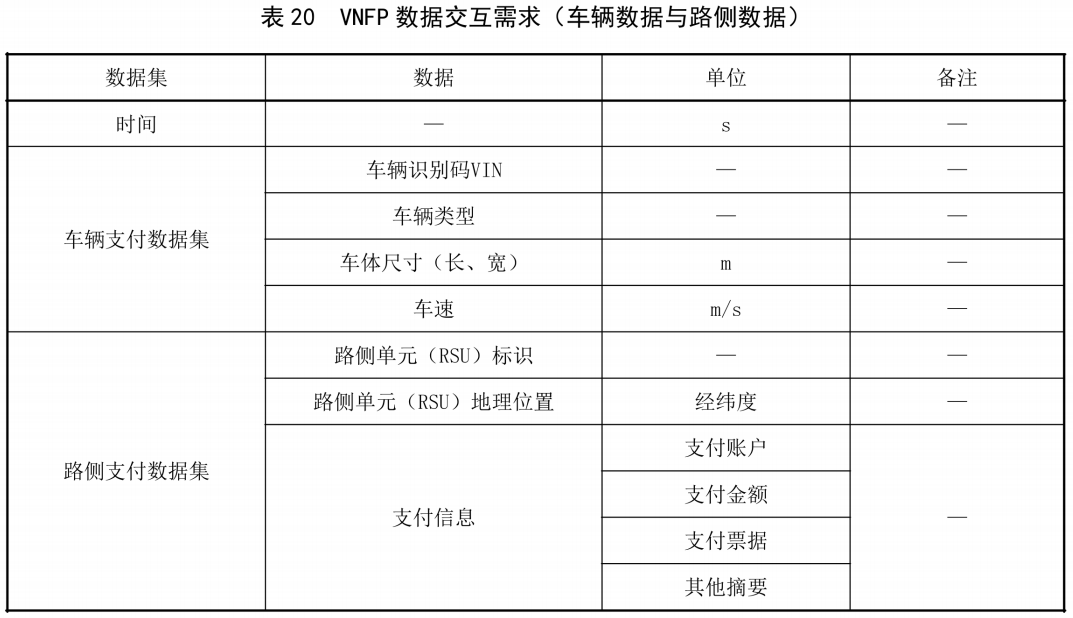
5.2.18.6数据交互需求
VNFP数据交互需求如表20。
6应用层交互数据集
6.1消息层基本介绍和要求
消息层数据集用ASN.1标准进行定义,遵循“消息帧-消息体-数据帧-数据元素”层层嵌套的逻辑进行制定。
数据集交互的编解码方式遵循非对齐压缩编码规则UPER。
6.2消息层数据集定义
6.2.1消息层数据集和消息帧
本文件定义的消息层数据集,主要由1个消息帧格式,5个最基本的消息体以及相应的数据帧和数据元素组成。
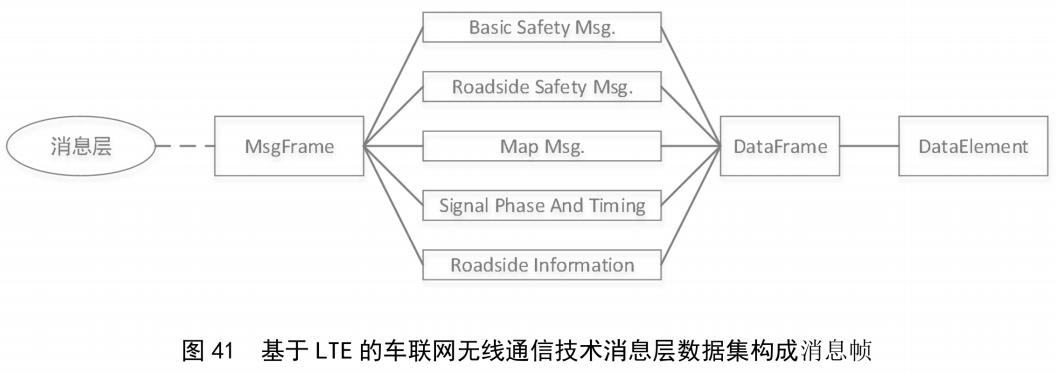
消息帧是单个应用层消息的统一打包格式,是数据编解码的唯一操作对象。消息帧由不同类别的消
息体组成,并支持扩展。
【ASN.1代码】
--Main message frame
MessageFrame ::= CHOICE {
bsmFrame BasicSafetyMessage,
mapFrame MapData,
rsmFrame RoadsideSafetyMessage,
spatFrame SPAT,
rsiFrame RoadSideInformation,
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.2消息体
6.2.2.1 Msg BSM
【定义】
车辆基本安全消息。是使用最广泛的一个应用层消息,用来在车辆之间交换安全状态数据。车辆通过该消息的广播,将自身的实时状态告知周围车辆,以此支持一系列协同安全等应用。
【ASN.1代码】
BasicSafetyMessage ::= SEQUENCE{ msgCnt MsgCount, id OCTET STRING (SIZE(8)), --temperary vehicle ID secMark DSecond, timeConfidence TimeConfidence OPTIONAL, pos Position3D, posAccuracy PositionalAccuracy OPTIONAL, --Accuracy for GNSS system posConfidence PositionConfidenceSet OPTIONAL, --Realtime position confidence transmission TransmissionState, speedSpeed, heading Heading, angle SteeringWheelAngle OPTIONAL, motionCfd MotionConfidenceSet OPTIONAL, accelSet AccelerationSet4Way, brakes BrakeSystemStatus, size VehicleSize, vehicleClass VehicleClassification, --VehicleClassification includes BasicVehicleClass and other extendible type safetyExt VehicleSafetyExtensions OPTIONAL, emergencyExt VehicleEmergencyExtensions OPTIONAL, }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
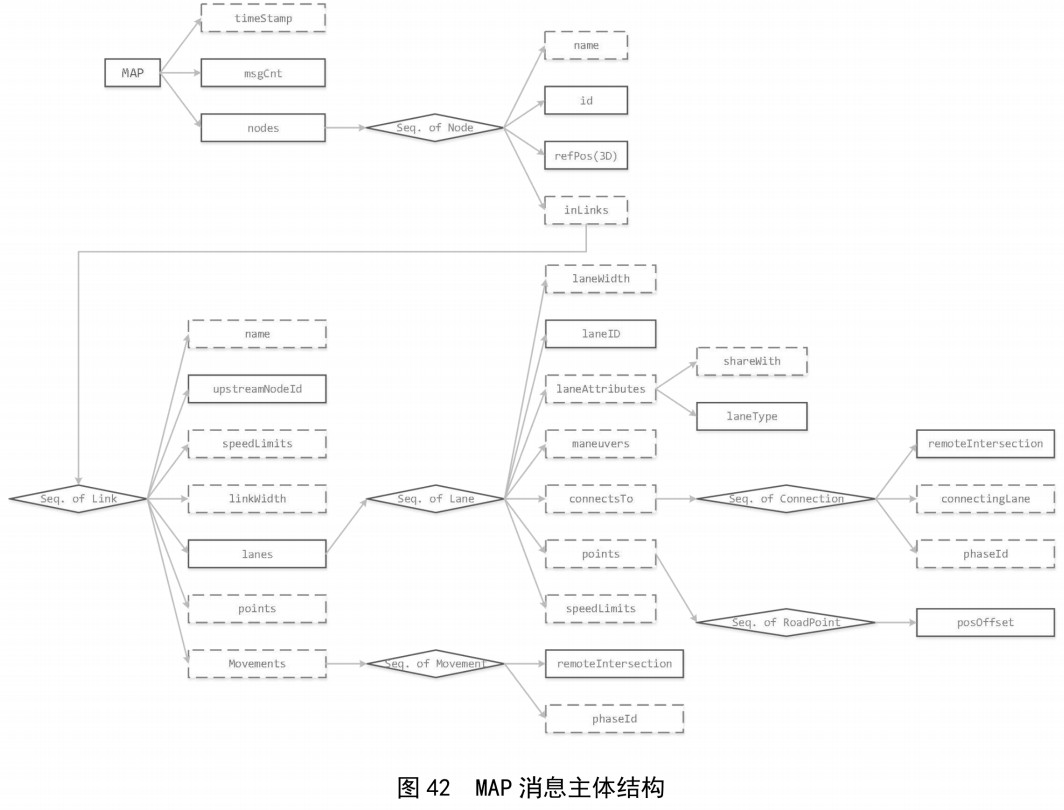
6.2.2.2 Msg MAP
【定义】
地图消息。由路侧单元广播,向车辆传递局部区域的地图信息。包括局部区域的路口信息、路段信息、车道信息,道路之间的连接关系等。
单个地图消息可以包含多个路口或区域的地图数据。路口处的信号灯信息则在SPAT消息中详细定义。
【ASN.1代码】
MapData ::= SEQUENCE{
msgCnt MsgCount,
timeStamp MinuteofTheYear OPTIONAL,
nodes NodeList,
--intersections or road endpoints
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.2.3 Msg RSI
【定义】
该消息适用于由路侧单元向周围车载单元发布的交通事件信息以及交通标志信息。
其中,交通事件信息当前支持国标GB/T29100-2012;交通标志信息当前支持国标GB5768.2-2009。
该消息帧能够打包一个或多个交通事件信息或者交通标志信息,同时包含发送该消息的路侧单元编号以及参考位置坐标。
车载单元在判定事件或标志的生效区域时,根据自身的定位与运行方向,以及消息本身提供的时效信息、关联区域/路段范围,来进行判定。消息体中,refPos字段用来提供本消息作用范围内的参考三维位置坐标,消息中所有的位置偏移量,均基于该参考坐标计算。真实位置坐标等于偏移量加上参考坐标。
【ASN.1代码】
RoadSideInformation ::= SEQUENCE{
msgCnt MsgCount,
moy MinuteofTheYear OPTIONAL,
id OCTET STRING (SIZE(8)),
--RSU ID
refPos Position3D,
--Reference position of this RSI message
rtes RTEList OPTIONAL,
--All the rte data packed in this message
rtss RTSList OPTIONAL,
--All the rts data packed in this message
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6.2.2.4 Msg RSM
【定义】
路侧安全消息。路侧单元通过路侧本身拥有的相应检测手段,得到的其周边交通参与者的实时状态信息(这里交通参与者包括路侧单元本身、周围车辆、非机动车、行人等),并将这些信息整理成本消息体所定义的格式,作为这些交通参与者的基本安全状态信息(类似于Msg BSM),广播给周边车辆,支持这些车辆的相关应用。
Msg RSM消息的存在,使得车辆对于周围环境的感知不仅仅依赖于Msg BSM消息。路侧单元基于路侧传感器,帮助车辆对其周围的环境进行了探测,并将实时信息通过Msg RSM消息传递给车辆。
Msg RSM消息中,refPos字段用来提供本消息作用范围内的参考三维位置坐标,消息中所有的位置偏移量,均基于该参考坐标计算。真实位置坐标等于偏移量加上参考坐标。
【ASN.1代码】
RoadsideSafetyMessage ::= SEQUENCE{
msgCnt MsgCount,
id OCTET STRING (SIZE(8)),
--RSU ID
refPos Position3D,
--Reference position of this RSM message
participants ParticipantList,
--All or part of the participants
--detected by RSU
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
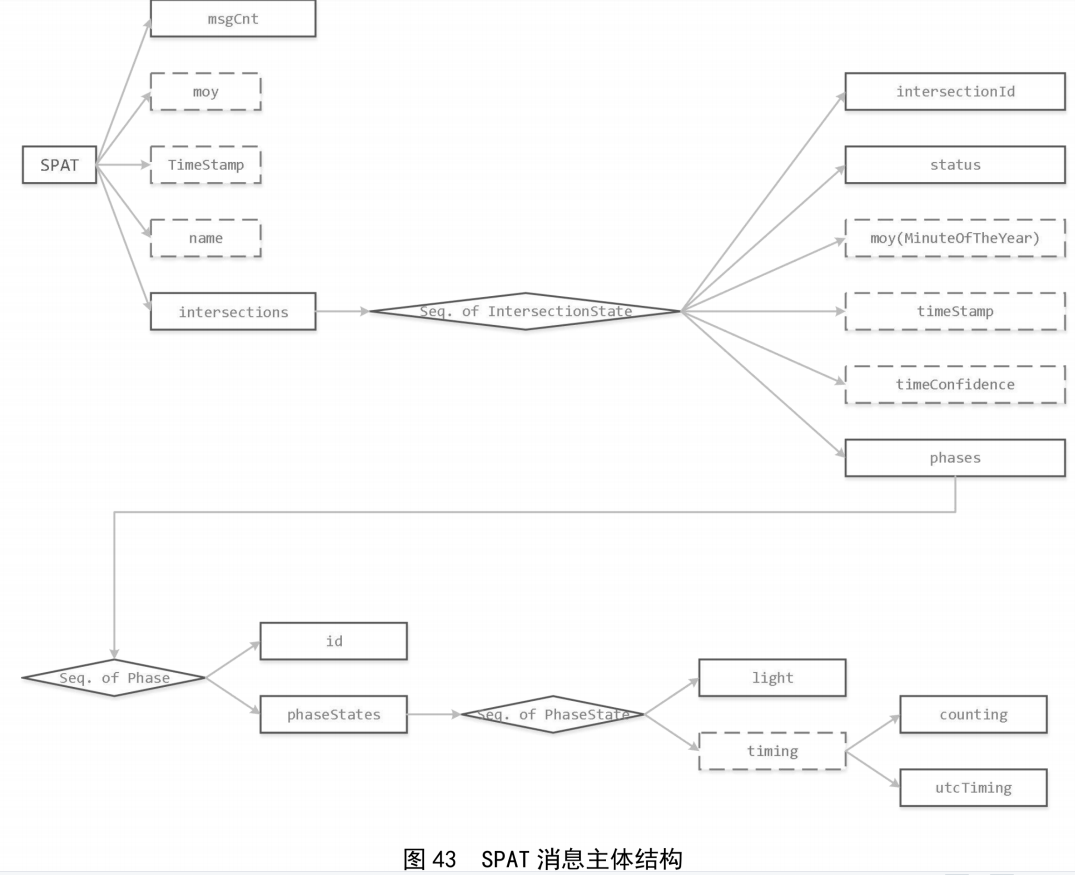
6.2.2.5 Msg SPAT
【定义】
信号灯消息。包含了一个或多个路口信号灯的当前状态信息。结合MAP消息,为车辆提供实时的前方信号灯相位信息。
图43给出了SPAT消息的主体结构。其中实线框为必有项,虚线框为可选项。
【ASN.1代码】
SPAT ::= SEQUENCE{
msgCnt MsgCount,
moy MinuteofTheYear OPTIONAL,
timeStamp DSecond OPTIONAL,
--Time stamp when this message is formed
name DescriptiveName OPTIONAL,
--human readable name for this collection
--to be used only in debug mode
intersections IntersectionStateList,
--sets of SPAT data (one per intersection)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.3数据帧
数据帧由其他数据单元或数据类型组合而成,具有特定的实际意义。是消息体的组成部分。
6.2.3.1 DF AccelerationSet4Way
【定义】
定义车辆四轴加速度。
一一Long:纵向加速度。向前加速为正,反向为负。
一一Lat:横向加速度。向右加速为正,反向为负。
一一Vert:垂直加速度。沿重力方向向下为正,反向为负。
一一Yaw:横摆角速度。顺时针旋转为正,反向为负。
【ASN.1代码】
AccelerationSet4Way ::= SEQUENCE{
long Acceleration,
--Along the Vehicle Longitudinal axis
lat Acceleration,
--Along the Vehicle Lateral axis
vert VerticalAcceleration,
--Along the Vehicle Vertical axis
yaw YawRate
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
6.2.3.2 DF_BrakeSystemStatus
【定义】
定义车辆的刹车系统状态。包括了7种不同类型的状态。
——brakePadel:刹车踏板踩下情况。
——wheelBrakes:.车辆车轮制动情况。
——traction:牵引力控制系统作用情况。
——abs:制动防抱死系统作用情况。
——scS:车身稳定控制系统作用情况。
——brakeBoost:刹车助力系统作用情况。
——auxBrakes:辅助制动系统(一般指手刹)情况。
【ASN.1代码】
BrakeSystemStatus ::= SEQUENCE{
brakePadel BrakePedalStatus OPTIONAL,
wheelBrakes BrakeAppliedStatus OPTIONAL,
traction TractionControlStatus OPTIONAL,
abs AntiLockBrakeStatus OPTIONAL,
scs StabilityControlStatus OPTIONAL,
brakeBoost BrakeBoostApplied OPTIONAL,
auxBrakes AuxiliaryBrakeStatus OPTIONAL
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
6.2.3.3 DF ConnectingLane
【定义】
用于定位上游车道转向连接的下游车道。
包括下游车道ID以及该转向的允许行驶行为,下游车道ID的作用范围是该车道所在的路段。
【ASN.1代码】
ConnectingLane ::= SEQUENCE{
lane LaneID,
--Index of the connecting lane
maneuver AllowedManeuvers OPTIONAL
--The Maneuver between
--the enclosing lane and this lane
--at the stop line to connect them
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.3.4 DF Connection
【定义】
定义当前车道与下游路段中车道的连接关系。
包括下游路段出口节点ID、连接的下游路段车道基本信息以及对应的信号灯相位号。在车道连接中定义的相位号,是对DF Movement中定义转向的相位号的一个补充。当某一些车道在转向时需要参考一些特殊的信号灯相位(而不是OF Movement中定义的默认相位),则应该将其定义在本数据帧中。
【ASN.1代码】
Connection ::= SEQUENCE{
remoteIntersection NodeReferenceID,
--This entry indicates the downstream intersection of the link this lane connects to.
--This provides a means to create meshes of lanes
connectingLane ConnectingLane OPTIONAL,
--The index of the connecting lane and also the maneuver from the current lane to it
--When we want to list the allowed lanes of the next link
--this lane can lead to,we use this entry
phaseId PhaseID OPTIONAL
--The matching signal group send by the SPAT message for this lane/maneuver.
--Shall be present unless the connectingLane
--has no signal group (is un-signalized)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
6.2.3.5 DF ConnectsToList
【定义】
定义路段中每条车道,在下游路口处与下游路段中车道的转向连接关系列表。
【ASN.1代码】
ConnectsToList ::= SEQUENCE (SIZE(1..16)) OF Connection
- 1
6.2.3.6 DF DDateTime
【定义】
定义完整的日期和时间数据单元。
【ASN.1代码】
DDateTime ::= SEQUENCE{
year DYear OPTIONAL,
month DMonth OPTIONAL,
day DDay OPTIONAL,
hour DHour OPTIONAL,
minute DMinute OPTIONAL,
second DSecond OPTIONAL,
offset DTimeOffset OPTIONAL --time zone
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
6.2.3.7 DF Description
【定义】
定义文本描述信息。提供两种编码形式。
提供ASCII字符文本形式,支持长度1字节到512字节。
提供中文编码形式,符合GB2312-80的编码规则,1个中文字符由2字节信息编码,支持长度1到256个中文字符。
【ASN.1代码】
Description ::= CHOICE{
textString IA5String (SIZE(1..512)),
--ASCII text
textGB2312 OCTET STRING (SIZE(2..512))
--text using Chinese-character encoding GB2312-80
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.8 DF Ful lPositionVector
【定义】
定义完整的参考轨迹点信息。用于车辆历史轨迹数据单元,作为一串轨迹点的参考点数据。
【ASN.1代码】
FullPositionVector ::= SEQUENCE{
utcTime DDateTime OPTIONAL,--time with mSec precision
pos Position3D,
heading Heading OPTIONAL,
transmission TransmissionState OPTIONAL,
speed Speed OPTIONAL,
posAccuracy PositionalAccuracy OPTIONAL,
posConficence PositionConfidenceSet OPTIONAL,
timeConfidence TimeConfidence OPTIONAL,
motionCfd MotionConfidenceSet OPTIONAL,
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.3.9 DF IntersectionState
【定义】
定义一个路口信号灯的属性和当前状态。
包括路口ID、信号灯工作状态、时间戳以及信号灯的相位列表。
【ASN.1代码】
IntersectionState ::= SEQUENCE{ intersectionId NodeReferenceID, --A globally unique value set,consisting of a regionID and intersection ID assignment --provides a unique mapping to the MAP Node status IntersectionStatusObject, --general status of the controller(s) moy MinuteofTheYear OPTIONAL, --Minute of current UTC year used only with messages to be archived timeStamp DSecond OPTIONAL, --the mSec point in the current UTC minute that --this message was constructed timeConfidence TimeConfidence OPTIONAL, --indicate the time confidence of the above UTC time phases PhaseList --Each Movement is given in turn --and contains its signal phase state, --mapping to the lanes it applies to,and --point in time it will end,and it --may contain both active and future states }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
6.2.3.10 DF IntersectionStateList
【定义】
定义一个路口信号灯集合。
【ASN.1代码】
IntersectionStateList ::= SEQUENCE (SIZE(1..32)) OF IntersectionState
- 1
6.2.3.11 DF Lane
【定义】
定义车道。
包含ID、共享属性、车道出口的允许转向行为、车道与下游路段车道的连接关系列表以及车道中间点列表。
【ASN.1代码】
Lane ::= SEQUENCE{ laneID LaneID, --The unique ID number assigned --to this lane object lanewidth LaneWidth OPTIONAL, laneAttributes LaneAttributes OPTIONAL, --Define basic attribute of lane maneuvers AllowedManeuvers OPTIONAL, --the permitted maneuvers for this lane connectsTo ConnectsToList OPTIONAL, --connection to downsteam lanes speedLimits SpeedLimitList OPTIONAL, --List all the speed limits points PointList OPTIONAL, --Define road points and segments }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
6.2.3.12 DF LaneAttributes
【定义】
定义车道属性。
包括车道共享情况以及车道本身所属的类别特性。
【ASN.1代码】
LaneAttributes ::= SEQUENCE{
shareWith LaneSharing OPTIONAL,
laneType LaneTypeAttributes
}
- 1
- 2
- 3
- 4
6.2.3.13 DF LaneList
【定义】
定义一个路段中包含的车道列表。
【ASN.1代码】
LaneList ::= SEQUENCE (SIZE(1..32)) OF Lane
- 1
6.2.3.14 DF_LaneTypeAttributes
【定义】
定义不同类别车道的属性集合。
【ASN.1代码】
LaneTypeAttributes ::= CHOICE{
vehicle LaneAttributes-Vehicle,--motor vehicle lanes
crosswalk LaneAttributes-Crosswalk, --pedestrian crosswalks
bikeLane LaneAttributes-Bike,--bike lanes
sidewalk LaneAttributes-Sidewalk,--pedestrian sidewalk paths
median LaneAttributes-Barrier,--medians channelization
striping LaneAttributes-Striping,--roadway markings
trackedVehicle LaneAttributes-TrackedVehicle,--trains and trolleys
parking LaneAttributes-Parking,--parking and stopping lanes
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
6.2.3.15 DF Link
【定义】
定义路段。从一个节点到相邻另一个节点的道路称为一个有向路段。
其属性包含名称、上游节点ID、限速集合、车道宽度,以及该路段包含的车道集合与交通标志标牌集合。
【ASN.1代码】
Link ::= SEQUENCE{ name DescriptiveName OPTIONAL, --Link name upstreamNodeId NodeReferenceID, --this link is from upstreamNode to the Node it belongs to speedLimits SpeedLimitList OPTIONAL, --List all the speed limits linkWidth LaneWidth OPTIONAL, --Width of this link points PointList OPTIONAL, --Define road points along the center of this link movements MovementList OPTIONAL, --Define movements at intersection lanes LaneList, --Lanes belong to this link ... }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
6.2.3.16 DF LinkList
【定义】
定义路段列表。
【ASN.1代码】
LinkList ::= SEQUENCE (SIZE (1..32)) OF Link
- 1
6.2.3.17 DF MotionConfidenceSet
【定义】
描述车辆运行状态的精度。
包括车速精度、航向精度和方向盘转角的精度。
【ASN.1代码】
MotionConfidenceSet ::= SEQUENCE{
speedCfd SpeedConfidence OPTIONAL,
headingCfd HeadingConfidence OPTIONAL,
steerCfd SteeringWheelAngleConfidence OPTIONAL
}
- 1
- 2
- 3
- 4
- 5
6.2.3.18 DF Movement
【定义】
描述道路与下游路段的连接关系,以及该连接对应的本地路口处信号灯相位ID
此处的相位ID事实上也是MAP消息与SPAT消息的唯一关联。车辆在确定了转向行为后,能够通过该相位ID数据,查看到SPAT中对应的相位实时状态,从而获得行车过程中的信号灯数据辅助。
【ASN.1代码】
Movement ::= SEQUENCE{
remoteIntersection NodeReferenceID,
--This entry indicates the downstream intersection of the link this lane connects to.
--This provides a means to create meshes of lanes
phaseId PhaseID OPTIONAL
--The matching signal group send by
--the SPAT message for this lane/maneuver.
--Shall be present unless the connectingLane
--has no signal group (is un-signalized)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
6.2.3.19 DF MovementList
【定义】
描述一条路段与下游路段的连接关系列表。
【ASN.1代码】
MovementList ::= SEQUENCE (SIZE(1..32)) OF Movement
- 1
6.2.3.20 DF Node
【定义】
地图节点。节点是地图的最基本组成部分,可以是交叉路口,也可以是一个路段的端点。在地图上,顺序的两个节点确定一条有向路段。
节点属性包括名称、ID、位置以及节点相连的上游路段集合。
一个节点中包含的路段,均以该节点作为下游端点。而从该节点出发的路段,则归属于路段下游节点的数据中。
Node数据帧中,refPos字段用来提供当前数据帧作用范围内的参考三维位置坐标,帧中所有的位置偏移量,均基于该参考坐标计算。真实位置坐标等于偏移量加上参考坐标。
【ASN.1代码】
Node ::= SEQUENCE{
--Node can be an intersection,or a road endpoint
name DescriptiveName OPTIONAL,
--Node name
id NodeReferenceID,
--A globally unique value set,
--consisting of a regionID and
--node ID assignment
refPos Position3D,
--3D position of the center of this Node.
--This position is also the reference position for the elements inside
inLinks LinkList OPTIONAL,
--all the links enter this Node
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
6.2.3.21 DF NodeList
【定义】
定义地图节点列表。
【ASN.1代码】
NodeList ::=SEQUENCE (SIZE(1..63)) OF Node
- 1
6.2.3.22 DF NodeReferencelD
【定义】
定义节点ID。
节点ID是由一个全局唯一的地区ID和一个地区内部唯一的节点ID组成。
【ASN.1代码】
NodeReferenceID ::= SEQUENCE{
region RoadRegulatorID OPTIONAL,
--a globally unique regional assignment value
--typical assigned to a regional DOT authority
--the value zero shall be used for testing needs
id NodeID
--a unique mapping to the node
--in question within the above region of use
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
6.2.3.23 DF ParticipantData
【定义】
定义交通参与者的基本安全信息,包括RSU自身以及RSU依靠感知手段获取的机动车、非机动车等交通参与者。
该参与者数据帧相当于OBU车辆自身广播的BSM消息,它由RSU感知并发送给周边网联车辆。当该参与者信息来源于RSU收到的BSM消息时,其中的id字段必须与BSM中的车辆id字段一致。
【ASN.1代码】
ParticipantData ::= SEQUENCE{ ptcType ParticipantType, ptcId INTEGER (0..65535), --temporary ID set by RSU --0 is RSU itself --1..255 represent participants detected by RSU --ptcId of different participant needs to be unique in RSU source SourceType, id OCTET STRING (SIZE(8))OPTIONAL, --temperary vehicle ID from BSM secMark DSecond, pos PositionOffsetLLV, posConfidence PositionConfidenceSet, transmission TransmissionState OPTIONAL, speed Speed, headingHeading, angle SteeringWheelAngle OPTIONAL, motionCfd MotionConfidenceSet OPTIONAL, accelSet AccelerationSet4Way OPTIONAL, size VehicleSize, --Size of participant including motor/non-motor/pedestrian/rsu --is represented by DE VehilceSize vehicleClass VehicleClassification OPTIONAL, ... }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
6.2.3.24 DF ParticipantList
【定义】
定义交通参与者列表。应用于RSM消息中,表示RSU当前探测到的所有或者部分交通参与者信息。
【ASN.1代码】
ParticipantList ::= SEQUENCE (SIZE(1..16)) OF ParticipantData
- 1
6.2.3.25 DF_PathHistory
【定义】
定义车辆历史轨迹。
利用一个参考轨迹点信息,以及一系列基于该参考信息的历史轨迹点,给出车辆一段完整的历史轨迹。车辆历史轨迹能够真实地反映其在当时的形式状态,且从侧面反映当时其所在的道路和交通环境。
数据单元中的参考轨迹点信息在时间上比所有轨迹点都要靠后(时间较晚)。
【ASN.1代码】
PathHistory ::= SEQUENCE{
initialPosition FullPositionVector OPTIONAL,
currGNSSstatus GNSSstatus OPTIONAL,
crumbData PathHistoryPointList,
...
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.26 DF PathHistoryPoint
【定义】
定义车辆的历史轨迹点。
包括位置、时间戳,以及轨迹点处的车速、位置精度以及航向等。
【ASN.1代码】
PathHistoryPoint ::= SEQUENCE{
llvOffset PositionOffsetLLV,
timeOffset TimeOffset,
--Offset backwards in time
speedSpeed OPTIONAL,
--Speed over the reported period
posAccuracy PositionConfidenceSet OPTIONAL,
--The accuracy of this value
heading CoarseHeading OPTIONAL,
--overall heading
...
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
6.2.3.27 DF_PathHistoryPointList
【定义】
定义车辆的历史轨迹。
该轨迹由一系列轨迹点组成。能够精准地给出车辆完整的历史行驶轨迹,可以以当前时刻运动状态为基准,也可以是一段时间之前的轨迹。
【ASN.1代码】
PathHistoryPointList ::= SEQUENCE (SIZE(1..23)) OF PathHistoryPoint
- 1
6.2.3.28 DF PathPointList
【定义】
用有序位置点列的方式,定义一个有向的作用范围。
例如,该数据帧应用于SI消息,配合半径信息,用来表示一个的车辆行进轨迹区段,该区段由有序位置点列组成,排列顺序与车辆行进方向一致。
【ASN.1代码】
PathPointList ::= SEQUENCE (SIZE(1..32)) OF PositionOffsetLLV
--Path point list for RTS message
- 1
- 2
6.2.3.29 DF_PathPrediction
【定义】
定义车辆的预测线路,主要是曲率半径。
【ASN.1代码】
PathPrediction ::=SEQUENCE{
radiusOfCurve RadiusOfCurvature,
--Units of 10cm
--straight path to use value of 32767
confidence Confidence,
--Units of 0.5 percent
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
6.2.3.30 DF Phase
【定义】
定义信号灯相位,一个相位包括一个相位ID以及一个相位状态列表。
【ASN.1代码】
Phase ::= SEQUENCE{ id PhaseID, --the group id is used to map to lists --of lanes (and their descriptions) which this MovementState data applies to --see comments in the Remarks for usage details phaseStates PhaseStateList --Consisting of sets of movement data with: --a)SignalPhaseState --b)TimeChangeDetails,and --c)AdvisorySpeeds (optional --Note one or more of the movement events may be for --a future time and that this allows conveying multiple --predictive phase and movement timing for various uses --for the current signal group }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
6.2.3.31 DF PhaseList
【定义】
定义一组信号灯包含的所有相位的列表。
【ASN.1代码】
PhaseList ::= SEQUENCE (SIZE(1..16)) OF Phase
--List of phases in one traffic signal
- 1
- 2
6.2.3.32 DF PhaseState
【定义】
定义信号灯的一个相位状态。
包含该状态对应的灯色,以及实时计时信息。
【ASN.1代码】
PhaseState ::= SEQUENCE
light LightState,
--Consisting of:
--Phase state (the basic 11 states)
--Directional,protected,or permissive state
timing TimeChangeDetails OPTIONAL,
--Timing Data in UTC time stamps for event
--includes start and min/max end times of phase
--confidence and estimated next occurrence
...
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.3.33 DF PhaseStateList
【定义】
定义一个信号灯的一个相位中的相位状态列表。
列表中每一个相位状态物理上对应了一种相位灯色,其属性包括了该状态的实时计时信息。
【ASN.1代码】
PhaseStateList ::= SEQUENCE (SIZE(1..16))OF PhaseState
- 1
6.2.3.34 DF PointList
【定义】
定义一个有向路段上的中间位置点列表,用来表达路段上截面或片段的特殊属性。列表中所有位置点需按上游至下游顺序排列。
【ASN.1代码】
PointList ::= SEQUENCE (SIZE (2..31)) OF RoadPoint
--At least 2 points of 1 lane
--entry line and exit line
--points need to be listed sequentially
--from upstream to downstream
- 1
- 2
- 3
- 4
- 5
6.2.3.35 DF Position-LL-24B
【定义】
24比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个12比特的经度、纬度偏差值组成。
【ASN.1代码】
Position-LL-24B ::= SEQUENCE{
--ranges of +-0.0002047 degrees
--ranges of +-22.634554 meters at the equator
lon OffsetLL-B12,
lat OffsetLL-B12
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.36 DF Position-LL-28B
【定义】
28比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个14比特的经度、纬度偏差值组成。
【AS.1代码】
Position-LL-28B ::= SEQUENCE{
--ranges of +-0.0008191 degrees
--ranges of +-90.571389 meters at the equator
lon OffsetLL-B14,
lat OffsetLL-B14
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.37 DF Position-LL-32B
【定义】
32比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个16比特的经度、纬度偏差值组成。
【ASN.1代码】
Position-LL-32B ::= SEQUENCE{
--ranges of +-0.0032767 degrees
--ranges of +-362.31873 meters at the equator
lon OffsetLL-B16,
lat OffsetLL-B16
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.38 DF Position-LL-36B
【定义】
36比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个18比特的经度、纬度偏差值组成。
【ASN.1代码】
Position-LL-36B ::= SEQUENCE{
--ranges of +-0.0131071 degrees
--ranges of +-01.449308 Kmeters at the equator
lon OffsetLL-B18,
lat OffsetLL-B18
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.39 DF Position-LL-44B
【定义】
44比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个22比特的经度、纬度偏差值组成。
【ASN.1代码】
Position-LL-44B ::= SEQUENCE{
--ranges of +-0.2097151 degrees
--ranges of +-23.189096 Kmeters at the equator
lon OffsetLL-B22,
lat OffsetLL-B22
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.40 DF Position-LL-48B
【定义】
48比特相对经纬度位置,表示当前位置点关于参考位置点的经纬度偏差。由两个24比特的经度、纬度偏差值组成。
【ASN.1代码】
Position-LL-48B ::= SEQUENCE{
--ranges of +-0.8388607 degrees
--ranges of +-92.756481 Kmeters at the equator
lon OffsetLL-B24,
lat OffsetLL-B24
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.41 DF Position-LLmD-64b
【定义】
64比特经纬度位置。实际上,该尺度采用了真实经纬度数据进行描述,非相对位置。
【ASN.1代码】
Position-LLmD-64b ::= SEQUENCE{
--a full 32b Lat/Lon range
lon Longitude,
lat Latitude
}
- 1
- 2
- 3
- 4
- 5
6.2.3.42 DF Position3D
【定义】
三维的坐标位置,经纬度和高程。
【ASN.1代码】
Position3D ::= SEQUENCE{
lat Latitude,
--in 1/10th micro degrees
long Longitude,
--in 1/10th micro degrees
elevation Elevation OPTIONAL
--in 10 cm units
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.3.43 DF_PositionalAccuracy
【定义】
基于椭圆模型定义一个定位系统自身的精度。
【ASN.1代码】
PositionalAccuracy ::= SEQUENCE{
--NMEA-183 values expressed in strict ASN form
semiMajor SemiMajorAxisAccuracy,
semiMinor SemiMinorAxisAccuracy,
orientation SemiMajorAxisOrientation
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.44 DF PositionConfidenceSet
【定义】
定义当前实时位置(经纬度和高程)的精度大小,包括水平位置精度和高程精度,由系统自身进行实时计算和更新。
【ASN.1代码】
PositionConfidenceSet ::= SEQUENCE{
pos PositionConfidence,--for both horizontal directions
elevation ElevationConfidence OPTIONAL
}
- 1
- 2
- 3
- 4
6.2.3.45 DF PositionOffsetLL
【定义】
经纬度偏差,来描述一个坐标点的相对位置。约定偏差值等于真实值减去参考值。
提供了7种尺度的描述方式。
【ASN.1代码】
PositionOffsetLL ::= CHOICE{ --Locations with LL content Span at the equator when using a zoom of one position-LL1 Position-LL-24B, --within +-22.634554 meters of the reference position position-LL2 Position-LL-28B, --within +-90.571389 meters of the reference position position-LL3 Position-LL-32B, --within +362.31873 meters of the reference position position-LL4 Position-LL-36B, --within +-01.449308 Kmeters of the reference position position-LL5 Position-LL-44B, --within +-23.189096 Kmeters of the reference position position-LL6 Position-LL-48B, --within +-92.756481 Kmeters of the reference position position-LatLon Position-LLmD-64b --node is a Lat/Lon absolute coordinates not a reference position }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
6.2.3.46 DF PositionOffsetLLV
【定义】
定义三维的相对位置(相对经纬度和相对高程)。约定偏差值等于真实值减去参考值。
【ASN.1代码】
PositionOffsetLLV ::= SEQUENCE{
offsetLL PositionoffsetLL,
--offset in lon/lat
offsetV Verticaloffset OPTIONAL
--offset in elevation
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.47 DF ReferenceLink
【定义】
定义关联路段,用路段的上下游节点D表示。
路段的上下游节点唯一确定一条路段。
可包含具体的关联车道。如不指定车道,则默认为该路段所有车道。
【ASN.1代码】
ReferenceLink ::= SEQUENCE{
--this Link is from Node of upstreamNodeld to Node of downstreamNodeId
upstreamNodeId NodeReferenceID,
downstreamNodeId NodeReferenceID,
referenceLanesReferenceLanes OPTIONAL
--Provide reference lanes if is necessary
--Refer to all lanes if this data is not given
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.3.48 DF ReferenceLinkList
【定义】
定义关联路段集合。
【ASN.1代码】
ReferenceLinkList ::= SEQUENCE (SIZE(1..16)) OF ReferenceLink
- 1
6.2.3.49 DF ReferencePath
【定义】
定义道路交通事件和标志的关联路径。
关联路径用有序的位置点列来描述交通事件的影响区域中心线,同时用半径来表示该影响区域边界离中心线的垂直距离,反映该区域的宽度以覆盖实际路段。
【ASN.1代码】
ReferencePath ::= SEQUENCE{
activePath PathPointList,
--RSI is active for vehicles within this path
--Points are listed from upstream to downstream
--along the vehicle drive direction.
--One path includes at least 1 points.
--A path with only 1 point means a round alert area
pathRadius Radius
--The biggest distance away from the alert path
--within which the warning is active.
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.3.50 DF ReferencePathList
【定义】
定义道路交通事件和标志的关联路径集合。用于RSI消息中。
【ASN.1代码】
ReferencePathList ::= SEQUENCE (SIZE(1..8)) OF ReferencePath
- 1
6.2.3.51 DF_RegulatorySpeedLimit
【定义】
定义限速属性。
包括限速类型以及所规定的限制速度。
【ASN.1代码】
RegulatorySpeedLimit ::= SEQUENCE{
type SpeedLimitType,
--The type of regulatory speed which follows
speed Speed
--The speed in units of 0.02 m/s
--See Section 11 for converting and translating
--speed expressed in mph into units of m/s
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.3.52 DF RSITimeDetails
【定义】
定义道路交通事件和道路交通标志信息的生效时间属性。
用UT℃世界标准时间定义,包括生效起始时刻、结束时刻以及结束时刻的置信度。精确到分钟。
【ASN.1代码】
RSITimeDetails ::= SEQUENCE{
startTime MinuteOfTheYear OPTIONAL,
endTime MinuteOfTheYear OPTIONAL,
--Exact or estimated end time
endTimeConfidence TimeConfidence OPTIONAL
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.53 DF RTEData
【定义】
定义道路交通事件信息。交通事件分类当前支持国标G邱/T29100-2012。该数据帧中,包含该交通事件的信息源、发生区域、时效、优先级以及影响区域等。还可以用文本的形式,对事件信息进行补充描述或说明。
车载单元在判定交通事件的影响区域时,根据提供的信息,可以用关联路径和关联路段两种方式进行计算。数据帧中的关联路径,用有序的位置点列来描述交通事件的影响区域中心线,同时用半径来表示该影响区域边界离中心线的垂直距离,反映该区域的宽度以覆盖实际路段。数据帧中的位置点均是根据外部参考位置坐标点的偏移坐标。关联路段,则关联到MAP消息中提供的相应路段和车道中。
【ASN.1代码】
RTEData ::= SEQUENCE{ rteId INTEGER (0..255), --local ID of this rte information set by RSU eventType EventType, --Type of event,according to China GB/T 29100-2012 eventSourceEventSource, eventPos PositionoffsetLLV OPTIONAL, --Position of this event,if exists eventRadius Radius OPTIONAL, --Radius of this event,if exists description Description OPTIONAL, --Additional description to this event timeDetails RSITimeDetails OPTIONAL, --Start time or end time when this event is active priority RSIPriority OPTIONAL, --the urgency of this RSI data,a relative --degree of merit compared with other RSI data referencePaths ReferencePathList OPTIONAL, --Related links of this traffic event eventConfidence Confidence OPTIONAL, --indicate the event confidence set by event source --the probability/confidence of the detected event --being truly extent at a certain place, --to help vehicle determine whether to trust the received information. ... }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
6.2.3.54 DF RTEList
【定义】
定义道路交通事件集合。
至少包含1个道路交通事件信息,最多包含8个。
【ASN.1代码】
RTEList ::= SEQUENCE (SIZE(1..8)) OF RTEData
--Road Traffic Event List
- 1
- 2
6.2.3.55 DF RTSData
【定义】
定义道路交通标志信息。交通标志信息当前支持国标G$5768.2-2009,包含其中所有标志内容。该数据帧中,可以用文本的形式,对相关的交通标志进行补充描述或说明。
车载单元在判定交通标志的生效区域时,根据提供的信息,可以用关联路径和关联路段两种方式进行计算。数据帧中的关联路径,用有序的位置点列来描述交通标志的生效区域中心线,同时用半径来表示该影响区域边界离中心线的垂直距离,反映该区域的宽度以覆盖实际路段。数据帧中的位置点均是根据外部参考位置坐标点的偏移坐标。关联路段,则关联到MAP消息中提供的相应路段和车道中。
【ASN.1代码】
RTSData ::= SEQUENCE{ rtsId INTEGER (0..255), --local ID of this rts information set by RSU signType SignType, --Type of sign,according to China GB 5768.2-2009 signPos PositionOffsetLLV OPTIONAL, --Position of the traffic sign,if exists description Description OPTIONAL, --Additional description to the sign timeDetails RSITimeDetails OPTIONAL, --start time or end time when this sign is active,if existed priority RSIPriority OPTIONAL, --the urgency of this RSI data,a relative --degree of merit compared with other RSI data referencePaths ReferencePathList OPTIONAL, --Related paths of this traffic sign referenceLinks ReferenceLinkList OPTIONAL, --Related links of this traffic sign ... }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
6.2.3.56 DF RTSList
【定义】
定义道路交通标志集合。
至少包含1个道路交通标志信息,最多包含16个。
【ASN.1代码】
RTSList ::= SEQUENCE (SIZE(1..16)) OF RTSData
- 1
6.2.3.57 DF RoadPoint
【定义】
表示完整道路上标记的一个位置点属性。
包括相对位置、位置点处路段截面的特殊属性集合、以及该位置点到下游相邻位置点之间局部路段的特殊属性集合。
当位置点为路段最下游的点,则其包含的下游截取路段属性为无效数据。
【ASN.1代码】
RoadPoint ::= SEQUENCE{
posOffset PositionOffsetLLV,
--Position offset to the reference position
}
- 1
- 2
- 3
- 4
6.2.3.58 DF_SignalState
【定义】
定义一个路口信号灯的属性和当前状态。包括其当前工作模式、当前时间戳以及实时的相位信息列表。
【ASN.1代码】
SignalState ::= SEQUENCE{ status IntersectionStatusObject, --general status of the controller(s) moy MinuteofTheYear OPTIONAL, --Minute of current UTC year --used only with messages to be archived timeStamp DSecond OPTIONAL, --the mSec point in the current UTC minute that --this message was constructed phases PhaseList --Each Movement is given in turn --and contains its signal phase state, --mapping to the lanes it applies to,and --point in time it will end,and it --may contain both active and future states }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
6.2.3.59 DF SpeedLimitList
【定义】
定义路段或车道的限速列表。
【ASN.1代码】
SpeedLimitList ::= SEQUENCE (SIZE(1..9)) OF RegulatorySpeedLimit
- 1
6.2.3.60 DFTimeChangeDetails
【定义】
定义一个信号灯相位的计时状态。
提供了两种可选的计时状态格式,一种是倒计时形式,另一种是UTC世界标准时间的形式。在实际使用时,由路侧设施根据实际情况选用。
【ASN.1代码】
TimeChangeDetails ::= CHOICE{
counting TimeCountingDown,
utcTiming UTCTiming,
}
- 1
- 2
- 3
- 4
6.2.3.61 DF TimeCountingDown
【定义】
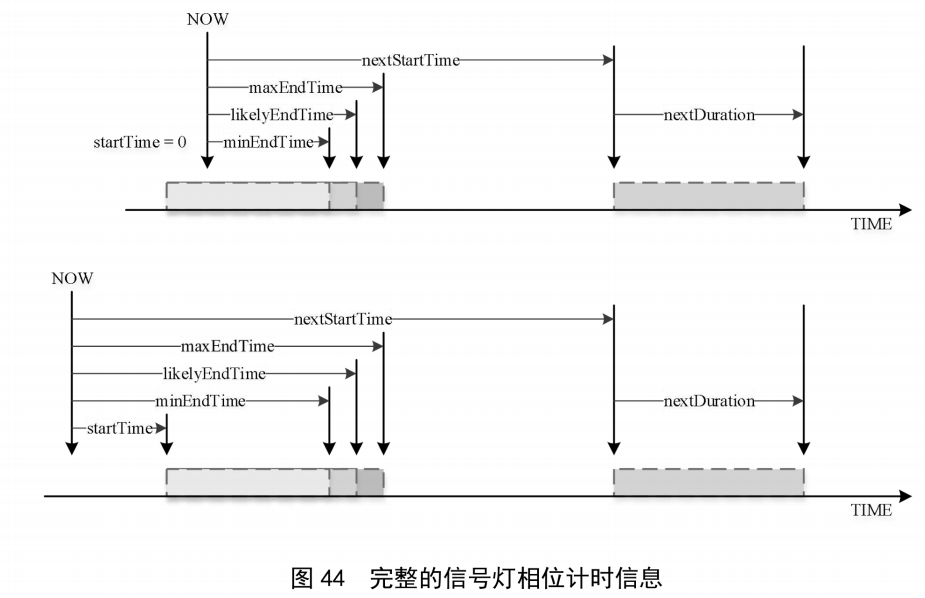
用倒计时形式,描述一个信号灯相位状态的完整计时状态。
——startTime:如果当前该相位状态已开始(未结束),则该数值为0;如果当前该相位状态未开始,则表示当前时刻距离该相位状态下一次开始的时间。
——minEndTime:表示当前时刻距离该相位状态下一次结束的最短时间(不管当前时刻该相位状态是否开始)。
——maxEndTime:表示当前时刻距离该相位状态下一次结束的最长时间(不管当前时刻该相位状态是否开始)。
——likelyEndTime:表示当前时刻距离该相位状态下一次结束的估计时间(不管当前时刻该相位状态是否开始)。如果该信号灯相位是定周期、固定时长,则该数值就表示当前时刻距离该相位状态下一次结束的准确时间。如果信号灯当前相位是非固定配时(感应配时、手动控制等),则该数值表示预测的结束时间,且预测时间必须在minEndTime和maxEndTime之间,可能由历史数据或一些事件触发等来进行预测。
——timeConfidence:上述likelyEndTime预测时间的置信度水平。
——nextStartTime:如果当前该相位状态已开始(未结束),则该数值表示当前时刻距离该相位状态下一次开始的估计时长:如果当前该相位状态未开始,则表示当前时刻距离该相位状态第二次开始的时间。通常用在一些经济驾驶模式(EC0 Drive)等相关的应用中。
——nextDuration:如果当前该相位状态已开始(未结束),则该数值表示该相位状态下一次开始后的持续时长:如果当前该相位状态未开始,则表示该相位状态第二次开始后的持续时长。与nextStartTime配合使用,通常用在一些经济驾驶模式(EC0 Drive)等相关的应用中。
图44显示了在当前时刻该相位状态开始或未开始两种情况下的各时间值。
【ASN.1代码】
TimeCountingDown ::=SEQUENCE{ startTime TimeMark, --When this phase state started, --if already started,the value is 0 minEndTime TimeMark OPTIONAL, --Expected shortest end time --the value is the min left time from now maxEndTime TimeMark OPTIONAL, --Expected longest end time --the value is the max left time from now likelyEndTime TimeMark, --Best predicted value based on other data --the value is the likely left time from now timeConfidence Confidence OPTIONAL, --Confidence of likelyTime nextStartTime TimeMark OPTIONAL, --A rough estimate of time from now when this phase state may next occur again --used to support various ECO driving power management needs. --If already started,this value is recommended to be delivered. nextDuration TimeMark OPTIONAL --A rough estimate of the time length of this phase state --when it may next occur again. --used to support various ECO driving power management needs. --If already started,this value is recommended to be delivered. }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
6.2.3.62 DF UTCTiming
【定义】
用UT世界标准时间形式,描述一个信号灯相位状态的完整计时状态。
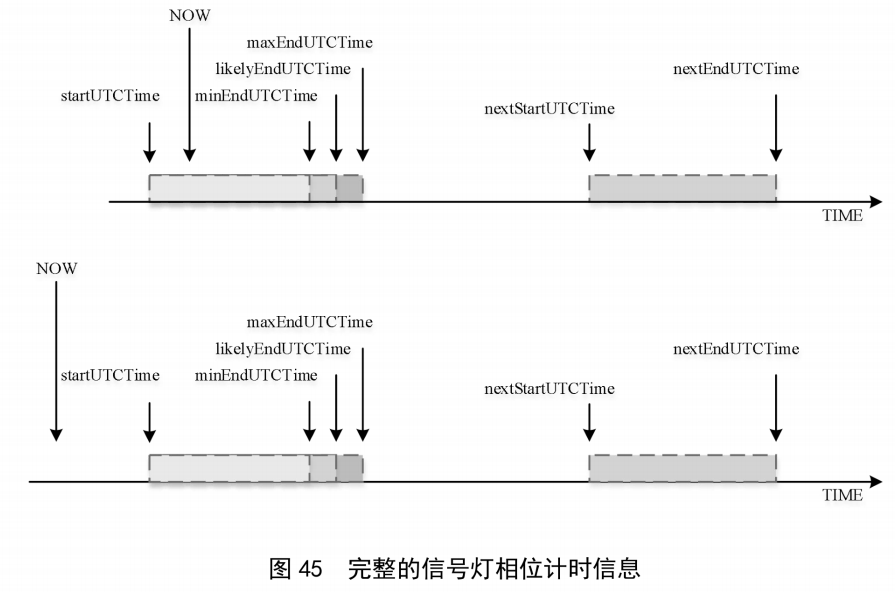
——startUTCTime:如果当前该相位状态已开始(未结束),则该数值为当前状态开始的时刻;如果当前该相位状态未开始,则表示当前该相位状态下一次开始的时刻。
——minEndUTCTime:表示该相位状态下一次以最短时间结束所对应的时刻(不管当前时刻该相位状态是否开始)。
——maxEndUTCTime:表示该相位状态下一次以最长时间结束所对应的时刻(不管当前时刻该相位状态是否开始)。
——likelyEndUTCTime:表示该相位状态估计下一次结束的时刻(不管当前时刻该相位状态是否开始)。如果该信号灯相位是定周期、固定时长,则该数值就表示该相位状态下一次结束的准确时刻。如果信号灯当前相位是非固定配时(感应配时、手动控制等),则该数值表示预测的结束时刻,且预测时刻必须在minEndUTCTime和maxEndUTCTime之间,可能由历史数据或一些事件触发等来进行预测。
——timeConfidence:上述likelyEndUTCTime预测时间的置信度水平。
——nextStartUTCTime:如果当前该相位状态已开始(未结束),则该数值表示该相位状态估计下一次开始的时刻;如果当前该相位状态未开始,则表示该相位状态估计第二次开始的时刻。通常用在一些经济驾驶模式(EC0 Drive)等相关的应用中。
——nextEndUTCTime:如果当前该相位状态已开始(未结束),则该数值表示该相位状态下一次开始后再结束的估计时刻;如果当前该相位状态未开始,则表示该相位状态第二次开始后再结束的估计时刻。与nextStartUTCTime配合使用,通常用在一些经济驾驶模式(EC0 Drive)等相关的应用中。
图45显示了在当前时刻该相位状态开始或未开始两种情况下的各时间值。
【ASN.1代码】
UTCTiming ::= SEQUENCE{ startUTCTime TimeMark, --If already started,the value represents --the time stamp when this phase state started. --If not,the value represents --the time stamp when this phase state starts. minEndUTCTime TimeMark OPTIONAL, --The time stamp when this state 1st ends in shortest time maxEndUTCTime TimeMark OPTIONAL, --The time stamp when this state 1st ends in longest time likelyEndUTCTime TimeMark, --The time stamp when this state 1st ends in best predicted time timeConfidence Confidence OPTIONAL, --Confidence of likelyEndUTCTime nextStartUTCTime TimeMark OPTIONAL, --A rough estimate of UTC time stamp when this phase state may next occur again --used to support various ECO driving power management needs. --If already started,this value is recommended to be delivered. nextEndUTCTime TimeMark OPTIONAL --A rough estimate of UTC time stamp when this phase state ends again used to support various ECO driving power management needs. --If already started,this value is recommended to be delivered. nextEndUTCTime TimeMark OPTIONAL --A rough estimate of UTC time stamp when this phase state ends again --used to support various ECO driving power management needs. --If already started,this value is recommended to be delivered. }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
6.2.3.63 DF VehicleClassification
【定义】
定义车辆的分类,从多个维度对车辆类型进行定义。
包含车辆基本类型,以及燃料动力类型。
【ASN.1代码】
VehicleClassification ::= SEQUENCE{
classification BasicVehicleClass,
fuelType FuelType OPTIONAL,
}
- 1
- 2
- 3
- 4
6.2.3.64 DF VehicleEmergencyExtensions
【定义】
定义紧急车辆或特种车辆的辅助信息集合。用于BSM消息中,向周围车辆告知本车在进行特殊作业的状态,需要周围车辆予以优先或避让。
包括车辆特殊行驶状态、警笛和指示灯的使用等。
各项信息均为可选项。
【ASN.1代码】
VehicleEmergencyExtensions ::= SEQUENCE{
responseType ResponseType OPTIONAL,
sirenUse SirenInUse OPTIONAL,
lightsUse LightbarInUse OPTIONAL,
}
- 1
- 2
- 3
- 4
- 5
6.2.3.65 DF VehicleSafetyExtensions
【定义】
定义车辆安全辅助信息集合。用于BSM消息中,作为基础安全数据的补充。
包括车辆特殊事件状态、车辆历史轨迹、路线预测、车身灯光状态等。
各项辅助信息均为可选项。
【ASN.1代码】
VehicleSafetyExtensions ::= SEQUENCE{
events VehicleEventFlags OPTIONAL,
pathHistory PathHistory OPTIONAL,
pathPrediction PathPrediction OPTIONAL,
lights ExteriorLights OPTIONAL,
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.3.66 DF Vehiclesize
【定义】
定义车辆尺寸大小。由车辆长宽高三个维度来定义尺寸,其中高度数值为可选项。
【ASN.1代码】
VehicleSize ::= SEQUENCE{
width VehicleWidth,
length VehicleLength,
height VehicleHeight OPTIONAL
}
- 1
- 2
- 3
- 4
- 5
6.2.3.67 DF VerticalOffset
【定义】
定义垂直方向位置偏差。提供了7种尺度范围的偏差表示方式。
【ASN.1代码】
Verticaloffset ::= CHOICE{
--Vertical Offset
--All below in steps of 10cm above or below the reference ellipsoid
offset1 VertOffset-B07,--with a range of +-6.3 meters vertical
offset2 Vertoffset-B08,--with a range of +-12.7 meters vertical
offset3 Vertoffset-B09,--with a range of +-25.5 meters vertical
offset4 VertOffset-B10,--with a range of +-51.1 meters vertical
offset5 Vertoffset-Bl1,--with a range of +-102.3 meters vertical
offset6 VertOffset-B12,--with a range of +-204.7 meters vertical
elevation Elevation --with a range of -409.5 to 6143.9 meters
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.4数据元素
数据元素是消息体或数据单元的组成部分。它由基本数据类型定义产生,具有实际物理意义。
6.2.4.1 DE Acceleration
【定义】
定义车辆加速度。
分辨率为0.01m/s2,数值2001为无效数值。
【ASN.1代码】
Acceleration ::=INTEGER (-2000..2001)
--Units of 0.01 m/s 2
--the value 2000 shall be used for values greater than 2000
--the value -2000 shall be used for values less than -2000
--a value of 2001 shall be used for Unavailable
- 1
- 2
- 3
- 4
- 5
6.2.4.2 DE Al lowedManeuvers
【定义】
定义一个(机动车)车道的允许转向行为。
【ASN.1代码】
AllowedManeuvers ::= BIT STRING{ --With bits as defined: --Allowed maneuvers at path end (stop line) --All maneuvers with bits not set are therefore prohibited --A value of zero shall be used for unknown,indicating no Maneuver maneuverStraightAllowed (0), --a Straight movement is allowed in this lane maneuverLeftAllowed (1), --a Left Turn movement is allowed in this lane maneuverRightAllowed (2), --a Right Turn movement is allowed in this lane maneuverUTurnAllowed (3), --a U turn movement is allowed in this lane maneuverLeftTurnOnRedAllowed (4), --a Stop,and then proceed when safe movement --is allowed in this lane maneuverRightTurnOnRedAllowed (5), --a Stop,and then proceed when safe movement --is allowed in this lane maneuverLaneChangeAllowed (6), --a movement which changes to an outer lane --on the egress side is allowed in this lane --(example:left into either outbound lane) maneuverNoStoppingAllowed (7), --the vehicle should not stop at the stop line --(example:a flashing green arrow) yieldAllwaysRequired (8), --the allowed movements above are not protected --(example:an permanent yellow condition) goWithHalt (9), --after making a full stop,may proceed caution (10), --proceed past stop line with caution reserved1 (11) --used to align to 12 Bit Field }(SIZE(12)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
6.2.4.3 DE AntiLockBrakeStatus
【定义】
定义刹车防抱死系统(ABS)状态。
【ASN.1代码】
AntiLockBrakeStatus ::= ENUMERATED{
unavailable (0),--Vehicle Not Equipped with ABS Brakes
--or ABS Brakes status is unavailable
off (1),--Vehicle's ABS are Off
on (2),--Vehicle's ABS are On but not Engaged
engaged (3)--Vehicle's ABS control is Engaged on any wheel
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.4.4 DE Auxi liaryBrakeStatus
【定义】
指示刹车辅助系统状态(通常为手刹)。
【ASN.1代码】
AuxiliaryBrakeStatus ::= ENUMERATED{
unavailable (0),--Vehicle Not Equipped with Aux Brakes
--or Aux Brakes status is unavailable
off (1),--Vehicle's Aux Brakes are Off
on (2),--Vehicle's Aux Brakes are On Engaged
reserved (3)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
6.2.4.5 DE BasicVehicleClass
【定义】
定义车辆基本类型。
【ASN.1代码】
BasicVehicleClass :: INTEGER (0..255) unknownVehicleClass BasicVehicleClass ::= 0 --Not Equipped,Not known or unavailable specialVehicleClass BasicVehicleClass ::= 1 --Special use -- Basic Passenger Motor Vehicle Types passenger-Vehicle-TypeUnknown BasicVehicleClass ::= 10--default type passenger-Vehicle-TypeOther BasicVehicleClass ::= 11 --various fuel types are handled in another element --Light Trucks,Pickup,Van,Panel lightTruck-Vehicle-TypeUnknown BasicVehicleClass ::= 20 --default type lightTruck-Vehicle-TypeOther BasicVehicleClass ::= 21 --Trucks,Various axle types,includes HPMS items truck-Vehicle-TypeUnknown BasicVehicleClass ::= 25 --default type truck-Vehicle-TypeOther BasicVehicleClass ::= 26 truck-axleCnt2 BasicVehicleClass ::= 27 --Two axle,six tire single units truck-axleCnt3 BasicVehicleClass ::= 28 --Three axle,single units truck-axleCnt4 BasicVehicleClass ::= 29 --Four or more axle,single unit truck-axleCnt4Trailer BasicVehicleClass ::= 30--Four or less axle,single trailer truck-axleCnt5Trailer BasicVehicleClass ::= 31--Five or less axle,single trailer truck-axleCnt6Trailer BasicVehicleClass ::= 32--Six or more axle,single trailer truck-axleCnt5MultiTrailer BasicVehicleClass ::= 33 --Five or less axle, multi-trailer truck-axleCnt6MultiTrailer BasicVehicleClass ::= 34--Six axle, multi-trailer truck-axleCnt7MultiTrailer BasicVehicleClass ::= 35 --Seven or more axle, multi-trailer -- Motorcycle Types motorcycle-TypeUnknown BasicVehicleClass ::= 40 --default type motorcycle-TypeOther BasicVehicleClass ::= 41 motorcycle-Cruiser-Standard BasicVehicleClass ::= 42 motorcycle-SportUnclad BasicVehicleClass ::= 43 motorcycle-SportTouring BasicVehicleClass ::= 44 motorcycle-SuperSport BasicVehicleClass ::= 45 motorcycle-Touring BasicVehicleClass ::= 46 motorcycle-Trike BasicVehicleClass ::= 47 motorcycle-wPassengers BasicVehicleClass ::= 48--type not stated --Transit Types transit-TypeUnknown BasicVehicleClass ::= 50 --default type transit-TypeOther BasicVehicleClass ::= 51 transit-BRT BasicVehicleClass ::= 52 transit-ExpressBus BasicVehicleClass ::= 53 transit-LocalBus BasicVehicleClass ::= 54 transit-SchoolBus BasicVehicleClass ::= 55 transit-FixedGuideway BasicVehicleClass ::= 56 transit-Paratransit BasicVehicleClass ::= 57 transit-Paratransit-Ambulance BasicVehicleClass ::= 58 --Emergency Vehicle Types emergency-TypeUnknown BasicVehicleClass ::= 60 --default type emergency-TypeOther BasicVehicleClass ::= 61--includes federal users emergency-Fire-Light-Vehicle BasicVehicleClass ::= 62 emergency-Fire-Heavy-Vehicle BasicVehicleClass ::= 63 emergency-Fire-Paramedic-Vehicle BasicVehicleClass ::= 64 emergency-Fire-Ambulance-Vehicle BasicVehicleClass ::= 65 emergency-Police-Light-Vehicle BasicVehicleClass ::= 66 emergency-Police-Heavy-Vehicle BasicVehicleClass ::= 67 emergency-Other-Responder BasicVehicleClass ::= 68 emergency-Other-Ambulance BasicVehicleClass ::= 69 --Other V2X Equipped Travelers otherTraveler-TypeUnknown BasicVehicleClass ::= 80 --default type otherTraveler-TypeOther BasicVehicleClass ::= 81 otherTraveler-Pedestrian BasicVehicleClass ::= 82 otherTraveler-Visually-Disabled BasicVehicleClass ::= 83 otherTraveler-Physically-Disabled BasicVehicleClass ::= 84 otherTraveler-Bicycle BasicVehicleClass ::= 85 otherTraveler-Vulnerable-Roadworker BasicVehicleClass ::= 86 --Other V2X Equipped Device Types infrastructure-TypeUnknown BasicVehicleClass ::= 90 --default type infrastructure-Fixed BasicVehicleClass ::= 91 infrastructure-Movable BasicVehicleClass ::= 92 equipped-CargoTrailer BasicVehicleClass ::= 93
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
6.2.4.6 DE BrakeAppliedStatus
【定义】
定义四轮分别的刹车状态。这里将车辆的轮胎分为左前、右前、左后、右后四组。当车辆进行刹车时,该数值分别指示了四组轮胎的刹车情况。
当车辆为单排轮胎(摩托车等)时,以左前和左后表示其前后轮,后侧轮胎对应数值置为0。当车辆某一组轮胎由多个组成时,其状态将等效到一个数值来表示。
【ASN.1代码】
BrakeAppliedStatus ::= BIT STRING{
unavailable (0),--When set,the brake applied status is unavailable
leftFront (1),--Left Front Active
leftRear (2),--Left Rear Active
rightFront (3),--Right Front Active
rightRear (4)--Right Rear Active
}(SIZE(5)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.4.7 DE BrakeBoostApplied
【定义】
通过刹车辅助系统的状态,指示车辆紧急刹车状态。
刹车辅助系统通过判断紧急情况是否需要急刹车,从而接管刹车系统,在驾驶员未来得及做出反应时进行刹车。辅助系统可能通过监测油门踏板的突然松开或前置检测器,来判断紧急刹车的需求。
【ASN.1代码】
BrakeBoostApplied ::= ENUMERATED{
unavailable (0),--Vehicle not equipped with brake boost
--or brake boost data is unavailable
off (1),--Vehicle's brake boost is off
on (2)--Vehicle's brake boost is on (applied)
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.8 DE BrakePedalStatus
【定义】
指示刹车踏板状态,是否处在被踩下状态。
【ASN.1代码】
BrakePedalStatus ::= ENUMERATED{
unavailable (0),--Vehicle brake pedal detector is unavailable
off (1),--Vehicle's brake pedal is not pressed
on (2)--Vehicle's brake pedal is pressed
}
- 1
- 2
- 3
- 4
- 5
6.2.4.9 DE CoarseHeading
【定义】
定义粗粒度的车辆航向角。
分辨率为1.5°。
【ASN.1代码】
CoarseHeading ::= INTEGER (0..240)
--Units of 1.5 degrees
--over a range of 0 358.5 degrees
--the value 240 shall be used for unavailable
- 1
- 2
- 3
- 4
6.2.4.10 DE Confidence
【定义】
定义置信度。
分辨率为0.005。
【ASN.1代码】
Confidence ::= INTEGER (0..200)
--Units of 0.5 percent
- 1
- 2
6.2.4.11DE_DDay
【定义】
定义1月中的日期。
有效范围是1~31。0表示未知日期。
【ASN.1代码】
DDay ::= INTEGER (0..31)
--units of days
- 1
- 2
6.2.4.12 DE DescriptiveName
【定义】
定义名称字符串类型。
【ASN.1代码】
DescriptiveName ::= IA5String (SIZE(1..63))
- 1
6.2.4.13 DE DHour
【定义】
定义1天中的小时时刻。
有效范围是0~23.24及以上表示未知或无效。
【ASN.1代码】
DHour ::= INTEGER (0..24)
--units of hours
- 1
- 2
6.2.4.14 DE Dminute
【定义】
定义1小时中的分钟时刻。
有效范围是0~59。数值60表示未知分钟时刻。
【ASN.1代码】
DMinute ::= INTEGER (0..60)
--units of minutes
- 1
- 2
6.2.4.15 DE DMonth
【定义】
定义1年中的月份。
有效范围是1~12。数值0表示未知月份。
【ASN.1代码】
DMonth ::= INTEGER(0..12)
--units of months
- 1
- 2
6.2.4.16 DE DSecond
【定义】
定义1分钟内的毫秒级时刻。
分辨率为1ms,有效范围是0~59999.60000及以上表示未知或无效数值。
【ASN.1代码】
DSecond ::= INTEGER (0..65535)
--units of milliseconds
- 1
- 2
6.2.4.17 DE DTimeOffset
【定义】
定义和UTC时间的分钟差,用来表示时区。比UTC快为正,否则为负。
【ASN.1代码】
DTimeOffset ::= INTEGER (-720..721)
--units of minutes from UTC time
- 1
- 2
6.2.4.18 DE DYear
【定义】
定义公历年份。
0表示未知年份。
【ASN.1代码】
DYear ::= INTEGER (0..4095)
--units of years
- 1
- 2
6.2.4.19 DE Elevation
【定义】
定义车辆海拔高程。
分辨率为0.1m。数值-4096表示无效数值。
【ASN.1代码】
Elevation ::= INTEGER (-4096..61439)
--In units of 10 cm steps above or below the reference ellipsoid
--Providing a range of -409.5 to 6143.9 meters
--The value -4096 shall be used when Unknown is to be sent
- 1
- 2
- 3
- 4
6.2.4.20 DE ElevationConfidence
【定义】
数值描述了95%置信水平的车辆高程精度。该精度理论上只考虑了当前高程传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
【ASN.1代码】
ElevationConfidence ::= ENUMERATED{ unavailable (0),--Not Equipped or unavailable e1ev-500-00(1),--(500m) e1ev-200-00(2),--(200m) e1ev-100-00(3),--(100m) e1ev-050-00(4),--(50m) e1ev-020-00(5),--(20m) e1ev-010-00(6),--(10m) e1ev-005-00(7),--(5m) e1ev-002-00(8),--(2m) e1ev-001-00(9),--(1m) e1ev-000-50(10),--(50cm) e1ev-000-20(11),--(20cm) e1ev-000-10(12),--(10cm) e1ev-000-05(13),--(5cm) e1ev-000-02(14),--(2cm) e1ev-000-01(15)--(1cm) }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
6.2.4.21 DE EventSource
【定义】
定义道路交通事件的信息来源。
【ASN.1代码】
EventSource ::= ENUMERATED{
unknown (0),--0 Unknown
police(1),--1 traffic police
government(2),--2 govenment
meteorological (3),--3 meteorological department
internet(4),
--4 internet services
detection(5),--5 local detection
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
6.2.4.22 DE EventType
【定义】
定义道路交通事件的类型,参考附录A。
其中,道路交通事件包括恶劣天气、异常路况和异常车况。GB/T29100-2012中定义的事件分类代码作为该值的千位和百位,交通事件分类顺序码作为该值的十位和个位。
【ASN.1代码】
EventType ::= INTEGER (0..65535)
--Traffic event type according to AppendixA and China GB/T 29100-2012
- 1
- 2
6.2.4.23 DE ExteriorLights
【定义】
定义车身的灯光状态。
【ASN.1代码】
ExteriorLights ::= BIT STRING{
--All lights off is indicated by no bits set
lowBeamHeadlightsOn (0),
highBeamHeadlightsOn (1),
leftTurnSignalOn (2),
rightTurnSignalOn (3),
hazardSignalOn (4),
automaticLightControlOn (5),
daytimeRunningLightsOn (6),
fogLightOn (7),
parkingLightsOn (8)
}(SIZE(9,..)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6.2.4.24 DE_FueIType
【定义】
定义车辆的燃料动力类型。
【ASN.1代码】
FuelType ::= INTEGER (0..15){
unknownFuel FuelType ::= 0 --Gasoline Powered
gasoline FuelType ::= 1
ethanol FuelType ::= 2 --Including blends
diesel FuelType ::= 3--All types
electric FuelType ::= 4
hybrid FuelType ::= 5--All types
hydrogen FuelType ::= 6
natGasLiquid FuelType ::= 7 --Liquefied
natGasComp FuelType ::= 8--Compressed
propane FuelType ::= 9
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6.2.4.25 DE GNSSstatus
【定义】
定义GNSS系统工作状态。包括设备工作状态、锁星情况和修正信息等。GNSS系统可以是北斗、GPS等相关系统和设备。
【ASN.1代码】
GNSSstatus ::= BIT STRING{
unavailable (0),--Not Equipped or unavailable
isHealthy (1),
isMonitored (2),
baseStationType (3),--Set to zero if a moving base station,
--or if a rover device (an OBU),
set to one if it is a fixed base station
aPDOPofUnder5 (4),--A dilution of precision greater than 5
inViewOfUnder5 (5),--Less than 5 satellites in view
localCorrectionsPresent (6),--pseudo range corrections used
networkCorrectionsPresent (7)--RTK type corrections used
}(SIZE(8))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6.2.4.26 DE Heading
【定义】
车辆或交通参与者的航向角。为运动方向与正北方向的顺时针夹角。
分辨率为0.0125°。
【ASN.1代码】
Heading ::= INTEGER (0..28800)
--Units of 0.0125 degrees
--A range of 0 to 359.9875 degrees
- 1
- 2
- 3
6.2.4.27 DE HeadingConfidence
【定义】
数值描述了95%置信水平的航向精度。该精度理论上只考虑了当前航向传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
【ASN.1代码】
HeadingConfidence ::= ENUMERATED{
unavailable (0),--Not Equipped or unavailable
prec10deg (1),--10 degrees
prec05deg (2),--5 degrees
prec0ldeg (3),--1 degrees
prec0-1deg (4),--0.1 degrees
prec0-05deg (5),--0.05 degrees
prec0-01deg(6),--0.01 degrees
prec0-0125deg (7)--0.0125 degrees
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
6.2.4.28 DE IntersectionStatusObject
【定义】
路口信号机的工作状态指示。用于SPAT消息中。
【ASN.1代码】
IntersectionStatusObject ::= BIT STRING{ manualControlIsEnabled (0), --Timing reported is per programmed values,etc.but person --at cabinet can manually request that certain intervals are --terminated early (e.g.green). stopTimeIsActivated (1), --And all counting/timing has stopped. failureFlash (2), --Above to be used for any detected hardware failures, --e.g.conflict monitor as well as for police flash preemptIsActive (3), signalPriorityIsActive (4), --Additional states fixedTimeOperation (5), --Schedule of signals is based on time only --(i.e.the state can be calculated) trafficDependentOperation (6), --Operation is based on different levels of traffic parameters --(requests,duration of gaps or more complex parameters) standbyOperation (7), --Controller:partially switched off or partially amber flashing failureMode (8), --Controller has a problem or failure in operation off (9), --Controller is switched off --Related to MAP and SPAT bindings recentMAPmessageUpdate (10), --Map revision with content changes recentChangeInMAPassignedLanesIDsUsed (11), --Change in MAP's assigned lanes used (lane changes) --Changes in the active lane list description noValidMAPisAvailableAtThisTime (12), --MAP (and various lanes indexes)not available noValidSPATisAvailableAtThisTime (13) --SPAT system is not working at this time --Bits 14,15 reserved at this time and shall be zero }(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
6.2.4.29 DE LaneAttributes-Barrier
【定义】
车道隔离的属性定义。主要指示车道隔离的物理形式。
【ASN.1代码】
LaneAttributes-Barrier ::= BIT STRING{ --With bits as defined: median-RevocableLane (0), --this lane may be activated or not based --on the current SPAT message contents --if not asserted,the lane is ALWAYS present median (1), whiteLineHashing (2), stripedLines (3), doubleStripedLines (4), trafficCones (5), constructionBarrier (6), trafficChannels (7), lowCurbs (8), highCurbs (9)-- Bits 10 15 reserved and set to zero }(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
6.2.4.30 DE LaneAttributes-Bike
【定义】
自行车道的属性定义。
【ASN.1代码】
LaneAttributes-Bike ::= BIT STRING{ --With bits as defined: bikeRevocableLane (0), --this lane may be activated or not based --on the current SPAT message contents --if not asserted,the lane is ALWAYS present pedestrianUseAllowed (1), --The path allows pedestrian traffic, --if not set,this mode is prohibited isBikeFlyOverLane (2), --path of lane is not at grade fixedCycleTime (3), --the phases use preset times --i.e.there is not a'push to)cross button biDirectionalCycleTimes (4), --ped walk phases use different SignalGroupID --for each direction.The first SignalGroupID --in the first Connection represents inbound' --flow (the direction of travel towards the first --node point)while second SignalGroupID in the --next Connection entry represents the outbound' --flow.And use of RestrictionClassID entries --in the Connect follow this same pattern in pairs. isolatedByBarrier (5), unsignalizedSegmentsPresent (6) --The lane path consists of one of more segments --which are not part of a signal group ID --Bits 7 15 reserved and set to zero }(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
6.2.4.31 DE LaneAttributes-Crosswalk
【定义】
人行横道的属性定义。指示车道的一系列通过属性和人行辅助设施。
【ASN.1代码】
LaneAttributes-Crosswalk ::= BIT STRING{ --With bits as defined: --MUTCD provides no suitable "types"to use here crosswalkRevocableLane (0), --this lane may be activated or not based --on the current SPAT message contents --if not asserted,the lane is ALWAYS present bicyleUseAllowed (1), --The path allows bicycle traffic, --if not set,this mode is prohibited isXwalkFlyOverLane (2), --path of lane is not at grade fixedCycleTime (3), --ped walk phases -- use preset times --i.e.there is not a'push to cross'button biDirectionalCycleTimes (4), --ped walk phases use different SignalGroupID --for each direction.The first SignalGroupID --in the first Connection represents inbound' --flow (the direction of travel towards the first --node point)while second SignalGroupID in the --next Connection entry represents the 'outbound' --flow.And use of RestrictionClassID entries --in the Connect follow this same pattern in pairs. hasPushToWalkButton (5), --Has a demand input audioSupport (6), --audio crossing cues present rfSignalRequestPresent (7), --Supports RF push to walk technologies unsignalizedSegmentsPresent (8) --The lane path consists of one of more segments --which are not part of a signal group ID --Bits 915 reserved and set to zero }(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
6.2.4.32 DE LaneAttributes-Parking
【定义】
停车车道的属性定义。指示车道允许停车的种类和停靠方式。
【ASN.1代码】
LaneAttributes-Parking ::= BIT STRING{ --With bits as defined: --Parking use details,note that detailed restrictions such as --allowed hours are sent by way of ITIS codes in the TIM message parkingRevocableLane (0), --this lane may be activated or not based --on the current SPAT message contents --if not asserted,the lane is ALWAYS present parallelParkingInUse (1), headInParkingInUse (2), doNotParkZone (3), --used to denote fire hydrants as well as --short disruptions in a parking zone parkingForBusUse (4), parkingForTaxiUse (5), noPublicParkingUse (6) --private parking,as in front of --private property --Bits 715 reserved and set to zero }(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
6.2.4.33 DE LaneAttributes-Sidewalk
【定义】
人行道的属性定义。
【ASN.1代码】
LaneAttributes-Sidewalk ::= BIT STRING {
--With bits as defined:
sidewalk-RevocableLane (0),
--this lane may be activated or not based
--on the current SPAT message contents
--if not asserted,the lane is ALWAYS present
bicyleUseAllowed (1),
--The path allows bicycle traffic,
--if not set,this mode is prohibited
isSidewalkFlyOverLane (2),
--path of lane is not at grade
walkBikes (3)
--bike traffic must dismount and walk
--Bits 4 15 reserved and set to zero
}(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
6.2.4.34 DE LaneAttributes-Striping
【定义】
标线车道的属性定义。指示了车道上网纹或者标志标线所传达的道路信息,如禁行、路线标识等,辅助驾驶员通过一些复杂的路口或路段,提高驾驶安全性。
【ASN.1代码】
LaneAttributes-Striping ::= BIT STRING{ --With bits as defined: stripeToConnectingLanesRevocableLane (0), --this lane may be activated or not activated based --on the current SPAT message contents --if not asserted,the lane is ALWAYS present stripeDrawOnLeft (1), stripeDrawOnRight (2), --which side of lane to mark stripeToConnectingLanesLeft (3), stripeToConnectingLanesRight (4), stripeToConnectingLanesAhead (5) --the stripe type should be --presented to the user visually --to reflect stripes in the --intersection for the type of movement indicated --Bits 6~15 reserved and set to zero }(SIZE(16))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
6.2.4.35 DE LaneAttributes-TrackedVehicle
【定义】
轨道车辆车道的属性定义。用来描述一条轨道车辆车道的特殊属性和其允许行驶的车辆种类。
【ASN.1代码】
LaneAttributes-TrackedVehicle ::= BIT STRING{
--With bits as defined:
spec-RevocableLane (0),
-this lane may be activated or not based
--on the current SPAT message contents
--if not asserted,the lane is ALWAYS present
spec-commuterRailRoadTrack (1),
spec-lightRailRoadTrack (2),
spec-heavyRailRoadTrack (3),
spec-otherRailType (4)--Bits 5 15 reserved and set to zero
}(SIZE(16)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.4.36 DE LaneAttributes-Vehicle
【定义】
车辆行驶车道的属性定义。用来描述一条车用车道的特殊属性和其允许行驶的汽车种类。
【ASN.1代码】
LaneAttributes-Vehicle ::= BIT STRING{
--With bits as defined:
isVehicleRevocableLane (0),
--this lane may be activated or not based
--on the current SPAT message contents
--if not asserted,the lane is ALWAYS present
isVehicleFlyOverLane (1),
--path of lane is not at grade
hovLaneUseOnly (2),
restrictedToBusUse (3),
restrictedToTaxiUse (4),
restrictedFromPublicUse (5),
hasIRbeaconCoverage (6),
permissionOnRequest (7)--e.g.to inform about a lane for e-cars
}(SIZE(8,..))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
6.2.4.37 DE Lane lD
【定义】
定义车道ID。车道定义在每一条有向路段上,同一条有向路段上的每个车道,都拥有一个单独的ID。
车道号,以该车道行驶方向为参考,自左向右从1开始编号。
ID为0表示无效ID。
【ASN.1代码】
LaneID ::= INTEGER (0..255)
--the value 0 shall be used when the lane ID is
--not available or not known
--the value 255 is reserved for future use
- 1
- 2
- 3
- 4
6.2.4.38 DE LaneShar ing
【定义】
定义车道被共享的情况。在已有的车道属性定义基础上,该数据表示此车道还会有其他的交通参与者者出现,并可能拥有相同的路权。
数据中每一位置1”表示对应的车道共享属性生效。
【ASN.1代码】
LaneSharing ::= BIT STRING{ --With bits as defined: overlappingLaneDescriptionProvided (0), --Assert when another lane object is present to describe the --path of the overlapping shared lane --this construct is not used for lane objects which simply cross multipleLanesTreatedAsOneLane (1), --Assert if the lane object path and width details represents --multiple lanes within it that are not further described --Various modes and type of traffic that may share this lane: otherNonMotorizedTrafficTypes (2),--horse drawn etc. individualMotorizedVehicleTraffic (3), busVehicleTraffic (4), taxiVehicleTraffic (5), pedestriansTraffic (6), cyclistVehicleTraffic (7), trackedVehicleTraffic (8), pedestrianTraffic (9) }(SIZE(10)) --All zeros would indicate not shared'and'not overlapping'
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
6.2.4.39 DE LaneWidth
【定义】
定义车道宽度。
分辨率为1cm。
【ASN.1代码】
LaneWidth ::= INTEGER (0..32767)
--units of 1 cm
- 1
- 2
6.2.4.40 DE Latitude
【定义】
定义纬度数值,北纬为正,南纬为负。
分辨率1e-7°。
【ASN.1代码】
Latitude ::= INTEGER (-900000000..900000001)
--Units of 1/10 micro degree
--Providing a range of plus-minus 90 degrees
- 1
- 2
- 3
6.2.4.41 DE Lightbar InUse
【定义】
定义紧急车辆或特殊车辆的警示灯或外置专用显示设备的工作状态。
【ASN.1代码】
LightbarInUse ::= ENUMERATED{
unavailable (0),--Not Equipped or unavailable
notInUse (1),--none active
inUse (2),
yellowCautionLights (3),
schooldBusLights (4),
arrowSignsActive (5),
slowMovingVehicle (6),
freqStops (7)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
6.2.4.42 DE LightState
【定义】
定义信号灯相位的灯色状态。支持G$14886规定的红、绿、黄三种信号灯灯色,以及亮灯、闪烁和熄灭三种状态。
对于绿灯状态,在应用实现时应参考实际路口的情况,选择采用通行允许相位(permissive–green)或通行保护相位(protected-green)。
【ASN.1代码】
LightState ::= ENUMERATED{ unavailable (0), --This state is used for unknown or error dark (1), --The signal is dark (unlit) --Reds flashing-red (2), --Reserved for special scenarios red (3), --Driver Action: --Stop vehicle at stop line. --Do not proceed. --Greens flashing-green (4), --Reserved for special scenarios permissive-green (5), --Driver Action: --Proceed with caution, --must yield to all conflicting traffic --Conflicting traffic may be present --in the intersection conflict area protected-green (6), --Driver Action: --Proceed,tossing caution to the wind, --in indicated (allowed)direction. --Yellows /Ambers --The vehicle is not allowed to cross the stop bar if it is possible --to stop without danger. yellow (7), --Driver Action: --Prepare to stop. --Proceed if unable to stop, --in indicated direction (to connected lane) --Clear Intersection. flashing-yellow (8), --Driver Action: --Proceed with caution, --Conflicting traffic may be present --in the intersection conflict area ... }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
6.2.4.43 DE Longitude
【定义】
定义经度数值。东经为正,西经为负。
分辨率为1e-7°。
【ASN.1代码】
Longitude ::= INTEGER (-1799999999..1800000001)
--Units of 1/10 micro degree
--Providing a range of plus-minus 180 degrees
- 1
- 2
- 3
6.2.4.44 DE MinuteOfTheYear
【定义】
数值用来表示当前年份,己经过去的总分钟数(UTC时间)。
其分辨率为1分钟。该数值配合DSecond数值,则可以表示以毫秒记的全年已过去的总时间。
【ASN.1代码】
MinuteOfTheYear ::= INTEGER (0..527040)
--the value 527040 shall be used for invalid
- 1
- 2
6.2.4.45 DE MsgCount
【定义】
发送方为自己发送的同类消息,依次进行编号。编号数值为0~127,循环使用。
该数据字段用于接收方对来自同一发送方的同一类消息,进行连续收包的监控和丢包的统计。
【ASN.1代码】
MsgCount ::= INTEGER (0..127)
- 1
6.2.4.46 DE NodelD
【定义】
定义节点D。路网最基本的构成即节点和节点之间连接的路段。节点可以是路口,也可以是一条路的端点。一个节点的ID在同一个区域内是唯一的。
数值0~255预留为测试使用。
【ASN.1代码】
NodeID ::= INTEGER (0..65535)
--The values zero through 255 are allocated for testing purposes
--Note that the value assigned to a node will be
--unique within a given regional ID only
- 1
- 2
- 3
- 4
6.2.4.47 DE OffsetLL-B12
【定义】
12比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
【ASN.1代码】
OffsetLL-B12 ::= INTEGER (-2048..2047)
--A range of +0.0002047 degrees
--Units of 0.1 microdegrees
- 1
- 2
- 3
6.2.4.48 DE OffsetLL-B14
【定义】
14比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
【ASN.1代码】
OffsetLL-B14 ::= INTEGER (-8192..8191)
--A range of +0.0008191 degrees
--Units of 0.1 microdegrees
- 1
- 2
- 3
6.2.4.49 DE OffsetLL-B16
【定义】
16比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
【ASN.1代码】
OffsetLL-B16 ::= INTEGER (-32768..32767)
--A range of +-0.0032767 degrees
--Units of 0.1 microdegrees
- 1
- 2
- 3
6.2.4.50 DE OffsetLL-B18
【定义】
18比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
【ASN.1代码】
OffsetLL-B18 ::= INTEGER(-131072..131071)
--A range of +0.0131071 degrees
--Units of 0.1 microdegrees
- 1
- 2
- 3
6.2.4.51 DE OffsetLL-B22
【定义】
22比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
【ASN.1代码】
OffsetLL-B22 ::= INTEGER(-2097152..2097151)
--A range of +-0.2097151 degrees
--Units of 0.1 microdegrees
- 1
- 2
- 3
6.2.4.52 DE OffsetLL-B24
【定义】
24比特数值,表示当前位置点关于参考位置点的经纬度偏差。值得注意的是,根据纬度的不同,相同的经纬度偏差值对应的实际球面距离可能不同。
关于参考点,向东或向北偏移,数值为正,反之为负。分辨率为1e-7°。
【ASN.1代码】
OffsetLL-B24 ::= INTEGER(-8388608..8388607)
--A range of +-0.8388607 degrees
--Units of 0.1 microdegrees
- 1
- 2
- 3
6.2.4.53 DE ParticipantType
【定义】
路侧单元检测到的交通参与者类型。
【ASN.1代码】
ParticipantType ::= ENUMERATED{
unknown (0),--Unknown
motor (1),--motor
non-motor (2),--non-motor
pedestrian (3),--pedestrian
rsu (4),--rsu
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
6.2.4.54 DE PhaselD
【定义】
定义信号灯相位ID。
数值0表示无效ID。
【ASN.1代码】
PhaseID INTEGER (0..255)
--The value 0 shall be used when the ID is not available or not known
- 1
- 2
6.2.4.55 DE PositionConfidence
【定义】
数值描述了95%置信水平的车辆位置精度。该精度理论上只考虑了当前位置传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
【ASN.1代码】
PositionConfidence ::= ENUMERATED{ unavailable (0),--Not Equipped or unavailable a500m (1),--500m or about 5 * 10 ^ 3 decimal degrees a200m (2),--200m or about 2 * 10 ^ 3 decimal degrees a100m (3),--100m or about 1 * 10 ^ 3 decimal degrees a50m (4),--50m or about 5 * 10 ^ -4 decimal degrees a20m (5),--20m or about 2 * 10 ^ -4 decimal degrees a10m (6),--10m or about 1 * 10 ^ 4 decimal degrees a5m (7),--5m or about 5 * 10 ^ -5 decimal degrees a2m (8),--2m or about 2 * 10 ^ -5 decimal degrees alm (9),--1m or about 1 * 10 ^ -5 decimal degrees a50cm (10),--0.50m or about 5 * 10 ^ -6 decimal degrees a20cm (11),--0.20m or about 2 * 10 ^ -6 decimal degrees al0cm (12),--0.10m or about 1 * 10 ^ -6 decimal degrees a5cm (13),--0.05m or about 5 * 10 ^ -7 decimal degrees a2cm (14),--0.02m or about 2 * 10 ^ -7 decimal degrees alcm (15)--0.01m or about 1 * 10 ^ -7 decimal degrees }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
6.2.4.56 DE Radius
【定义】
表示绝对值半径大小。
分辨率为10cm。
【ASN.1代码】
Radius ::= INTEGER (0..65535)
--Define radius
--Unit is 0.1m
- 1
- 2
- 3
6.2.4.57 DE RadiusOfCurvation
【定义】
表示车辆预测自身前方行驶轨迹的曲率半径。数值可能来源于地图数据、曲率传感器、视觉传感器、定位系统等。
分辨率为10cm。轨迹曲线向右偏转(圆心在车辆行驶方向右侧)数值为正,向左为负。数值32767表示直线行驶。
【ASN.1代码】
RadiusOfCurvature ::= INTEGER (-32767..32767)
--Units of 10cm
--A straight path to use value of 32767
- 1
- 2
- 3
6.2.4.58 DE ReferenceLanes
【定义】
定义路段中指定的关联车道。
将指定车道号对应的比特位置1表示该车道为有效的关联车道。最多支持15条车道。车道号,以该车道行驶方向为参考,自左向右从1开始编号。
【ASN.1代码】
ReferenceLanes ::= BIT STRING{ --With bits as defined: reserved (0), 1ane1(1), lane2(2), 1ane3(3), 1ane4(4), 1ane5(5), lane6(6), 1ane7(7), lane8(8), lane9(9), 1ane10(10), 1ane11(11), 1ane12(12), 1ane13(13), 1ane14(14), 1ane15(15) }(SIZE(16)) --Set bit to 1 if the related lane is effective --Support maximum 15 lanes
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
6.2.4.59 DE ResponseType
【定义】
定义紧急车辆或特殊车辆当前的行驶状态或驾驶行为。
【ASN.1代码】
ResponseType ::= ENUMERATED{
notInUseOrNotEquipped (0),
emergency (1),--active service call at emergency level
nonEmergency (2),--also used when returning from service call
pursuit (3),--sender driving may be erratic
stationary (4),--sender is not moving,stopped along roadside
slowMoving (5),--such as a litter trucks,etc.
stopAndGoMovement (6),--such as school bus or garbage truck
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
6.2.4.60 DE RSIPriority
【定义】
表示RSI消息中不同类型交通事件或交通标志的优先级。数值长度占8位,其中低五位为0,为无效位,高三位为有效数据位。数值有效范围是B00000000到B11100000,分别表示8档由低到高的优先级。
【ASN.1代码】
RSIPriority ::= OCTET STRING (SIZE(1))
--The lower five bits are reserved and shall be set to zero
--Value from B00000000 to B11100000 represents the lowest to the highest level
- 1
- 2
- 3
6.2.4.61 DE RoadRegulator ID
【定义】
定义地图中各个划分区域的D号。
数值0仅用于测试。
【ASN.1代码】
RoadRegulatorID ::= INTEGER (0..65535)
--The value zero shall be used for testing only
- 1
- 2
6.2.4.62 DE SemiMajorAxi sAccuracy
【定义】
定义用椭圆模型表示的GNSS系统精度中半长轴的大小。
数值分辨率为0.05m。
【ASN.1代码】
SemiMa jorAxisAccuracy ::= INTEGER (0.255)
--semi-major axis accuracy at one standard dev
--range 0-12.7 meter,units of 0.05m
--254 any value equal or greater than 12.70 meter
--255 unavailable semi-major axis value
- 1
- 2
- 3
- 4
- 5
6.2.4.63 DE SemiMajorAxisOrientation
【定义】
定义用椭圆模型表示的GSS系统精度中,正北方向顺时针到最近半长轴的夹角大小。
数值分辨率为0.0054932479度。
【ASN.1代码】
SemiMajorAxisOrientation ::= INTEGER (0..65535)
--orientation of semi-major axis
--relative to true north (0 359.9945078786 degrees)
--Units of360/65535deg=0.0054932479
--a value of 0 shall be 0 degrees
--a value of 1 shall be 0.0054932479 degrees
--a value of 65534 shall be 359.9945078786 deg
--a value of 65535 shall be used for orientation unavailable
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
6.2.4.64 DE SemiMinorAxisAccuracy
【定义】
定义用椭圆模型表示的GNSS系统精度中半短轴的大小。
数值分辨率为0.05m。
【ASN.1代码】
SemiMinorAxisAccuracy ::= INTEGER (0..255)
--semi-minor axis accuracy at one standard dev
--range 0-12.7 meter,units of 0.05m
--254 any value equal or greater than 12.70 meter
--255 unavailable semi-minor axis value
- 1
- 2
- 3
- 4
- 5
6.2.4.65 DE SignType
【定义】
定义道路交通标志的类型。
数值0表示未知类型,或文本描述信息。大于0数值表示交通标志标牌信息,其编号参照国标GB5768.2-2009中“交通标志中文名称索引”表序号。
【ASN.1代码】
SignType ::= INTEGER (0..65535)
--Value 0 means unknown type or using text description
--Traffic sign types refer to China GB 5768.2-2009
- 1
- 2
- 3
6.2.4.66 DE SirenlnUse
【定义】
定义紧急车辆或特殊车辆的警笛或任何专用发声装置的状态。
【ASN.1代码】
SirenInUse ::= ENUMERATED{
unavailable (0),--Not Equipped or unavailable
notInUse (1),
inUse (2),
reserved (3)--for future use
}
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.67 DE_SourceType
【定义】
定义交通参与者数据的来源。包括以下类型:
——unknown:未知数据源类型;
——selfinfo:RSU自身信息:
——v2x:来源于参与者自身的v2x广播消息;
——video:来源于视频传感器:
——microwaveRadar:来源于微波雷达传感器;
——loop:来源于地磁线圈传感器;
——lidar:来源于激光雷达传感器;
——integrated:2类或以上感知数据的融合结果。
【ASN.1代码】
SourceType ::= ENUMERATED{
unknown(0),
selfinfo(1),
v2x(2),
video (3),
microwaveRadar (4),
1oop(5),
lidar (6),
integrated (7),
...
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.4.68 DE Speed
【定义】
车辆或其他交通参与者的速度大小。
分辨率为0.02m/s。数值8191表示无效数值。
【ASN.1代码】
Speed ::= INTEGER (0..8191)
--Units of 0.02 m/s
--The value 8191 indicates that
--speed is unavailable
- 1
- 2
- 3
- 4
6.2.4.69 DE SpeedConfidence
【定义】
数值描述了95%置信水平的速度精度。该精度理论上只考虑了当前速度传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
【ASN.1代码】
SpeedConfidence ::= ENUMERATED{
unavailable (0),--Not Equipped or unavailable
prec100ms (1),--100 meters/sec
prec10ms (2),--10 meters/sec
prec5ms (3),--5 meters/sec
preclms (4),--1 meters/sec
prec0-1ms (5),--0.1 meters/sec
prec0-05ms (6),--0.05 meters/sec
prec0-01ms (7)--0.01 meters/sec
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
6.2.4.70 DE_SpeedLimitType
【定义】
定义限速类型,指示给出的限速大小对应的参考类型。
【ASN.1代码】
SpeedLimitType ::= ENUMERATED{ unknown,--Speed limit type not available maxSpeedInSchoolZone,--Only sent when the limit is active maxSpeedInSchoolZoneWhenChildrenArePresent,--Sent at any time maxSpeedInConstructionZone,--Used for work zones,incident zones,etc. --where a reduced speed is present vehicleMinSpeed, vehicleMaxSpeed,--Regulatory speed limit for general traffic vehicleNightMaxSpeed, truckMinSpeed, truckMaxSpeed, truckNightMaxSpeed, vehiclesWithTrailersMinSpeed, vehiclesWithTrailersMaxSpeed, vehiclesWithTrailersNightMaxSpeed, ... }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
6.2.4.71 DE StabilityControlStatus
【定义】
定义车辆动态稳定控制系统状态。
——Unavailable:系统未装备或不可用。
——0ff:系统处于关闭状态。
——0n:系统处于开启状态,但未触发。
——Engaged:系统被触发,处于作用状态。
【ASN.1代码】
StabilityControlStatus ::= ENUMERATED{
unavailable (0),--Not Equipped with SC
--or SC status is unavailable
off (1),--Off
on (2),--On or active (but not engaged)
engaged (3)--stability control is Engaged
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
6.2.4.72 DE Steer ingWhee lAngle
【定义】
定义车辆方向盘转角。向右为正,向左为负。
分辨率为1.5°。数值127为无效数值。
【ASN.1代码】
SteeringWheelAngle ::= INTEGER (-126..127)
--Units of 1.5 degrees,a range of -189 to +189 degrees
--+001=+1.5deg
---126 =-189 deg and beyond
--+126 =+189 deg and beyond
--+127 to be used for unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.73 DE Steer ingWheelAngleConfidence
【定义】
数值描述了95%置信水平的车辆方向盘转角精度。
【ASN.1代码】
SteeringWheelAngleConfidence ::= ENUMERATED{
unavailable (0),--Not Equipped with Wheel angle
--or Wheel angle status is unavailable
prec2deg (1),--2 degrees
precldeg (2),--1 degree
prec0-02deg (3)--0.02 degrees
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
6.2.4.74 DE TimeConfidence
【定义】
数值描述了95%置信水平的时间精度。该精度理论上只考虑了当前计时系统本身传感器的误差。但是,当系统能够自动检测错误并修正,相应的精度数值也应该提高。
【ASN.1代码】
TimeConfidence ::= ENUMERATED{ unavailable (0),--Not Equipped or unavailable time-100-000 (1),--Better than 100 Seconds time-050-000 (2),--Better than 50 Seconds time-020-000 (3),--Better than 20 Seconds time-010-000 (4),--Better than 10 Seconds time-002-000 (5),--Better than 2 Seconds time-001-000 (6),--Better than 1 Second time-000-500(7),--Better than 0.5 Seconds time-000-200(8),--Better than 0.2 Seconds time-000-100(9),-- Better than 0.1 Seconds time-000-050 (10),--Better than 0.05 Seconds time-000-020 (11),--Better than 0.02 Seconds time-000-010 (12),--Better than 0.01 Seconds time-000-005 (13),--Better than 0.005 Seconds time-000-002 (14),--Better than 0.002 Seconds time-000-001 (15),--Better than 0.001 Seconds --Better than one millisecond time-000-000-5 (16),--Better than 0.000,5 Seconds time-000-000-2 (17),--Better than 0.000,2 Seconds time-000-000-1 (18),--Better than 0.000,1 Seconds time-000-000-05 (19),--Better than 0.000,05 Seconds time-000-000-02 (20),--Better than 0.000,02 Seconds time-000-000-01 (21),--Better than 0.000,01 Seconds time-000-000-005 (22),--Better than 0.000,005 Seconds time-000-000-002 (23),--Better than 0.000,002 Seconds time-000-000-001 (24),--Better than 0.000,001 Seconds --Better than one micro second time-000-000-000-5(25),--Better than0.000,000,5 Seconds time-000-000-000-2(26),--Better than0.000,000,2 Seconds time-000-000-000-1 (27),--Better than 0.000,000,1 Seconds time-000-000-000-05(28),--Better than0.000,000,05 Seconds time-000-000-000-02(29),--Better than0.000,000,02 Seconds time-000-000-000-01(30),--Better than0.000,000,01 Seconds time-000-000-000-005(31),--Better than0.000,000,005 Seconds time-000-000-000-002(32),--Better than0.000,000,002 Seconds time-000-000-000-001(33),--Better than0.000,000,001 Seconds --Better than one nano second time-000-000-000-000-5(34),--Better than0.000,000,000,5 Seconds time-000-000-000-000-2(35),--Better than0.000,000,000,2 Seconds time-000-000-000-000-1(36),--Better than0.000,000,000,1 Seconds time-000-000-000-000-05(37),--Better than0.000,000,000,05 Seconds time-000-000-000-000-02(38),--Better than0.000,000,000,02 Seconds time-000-000-000-000-01(39)--Better than0.000,000,000,01 Seconds }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
6.2.4.75 DE TimeMark
【定义】
以0.1秒为单位,定义一小时中的时间。可以表示当前小时中的时刻,也可以表示长度不超过1小时的时间段。
分辨率为0.1秒。有效范围是0~35999。数值36000表示大于1小时的时间长度。数值36001表示无效数值。
【ASN.1代码】
TimeMark ::= INTEGER (0..36001)
--Tenths of a second in the current or next hour
--In units of 1/10th second from UTC time
--A range of 0 36000 covers one hour
--The values 35991..35999 are used when a leap second occurs
--The value 36000 is used to indicate time >3600 seconds
--36001 is to be used when value undefined or unknown
--Note that this is NOT expressed in GNSS time
--or in local time
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.4.76 DE TimeOffset
【定义】
以10毫秒为单位,定义当前描述时刻(较早)相对于参考时间点(较晚)的偏差。用于车辆历史轨迹点的表达。
分辨率为10毫秒。
值65535表示无效数据。
【ASN.1代码】
TimeOffset ::= INTEGER (1..65535)
--Units of 10 mSec,
--with a range of 0.01 seconds to 10 minutes and 55.34 seconds
--a value of 65534 to be used for 655.34 seconds or greater
--a value of 65535 to be unavailable
- 1
- 2
- 3
- 4
- 5
6.2.4.77 DE_TractionControlStatus
【定义】
牵引力控制系统实时状态。
——Unavailable:系统未装备或不可用。
——0ff:系统处于关闭状态。
——0n:系统处于开启状态,但未触发。
——Engaged:系统被触发,处于作用状态。
【ASN.1代码】
TractionControlStatus ::= ENUMERATED{
unavailable (0),--Not Equipped with traction control
--or traction control status is unavailable
off (1),--traction control is Off
on (2),--traction control is On (but not Engaged)
engaged (3)--traction control is Engaged
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
6.2.4.78 DE TransmissionState
【定义】
车辆档位状态。
——Neutral:空档。
——Park:停止档。
——ForwardGears:前进档。
——ReverseGears:倒档。
【ASN.1代码】
TransmissionState ::= ENUMERATED{
neutral (0),--Neutral
park (1),--Park
forwardGears (2),--Forward gears
reverseGears (3),--Reverse gears
reserved1 (4),
reserved2 (5),
reserved3 (6),
unavailable (7)--not-equipped or unavailable value,
--Any related speed is relative to the vehicle reference frame used
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
6.2.4.79 DE VehicleEventFlags
【定义】
定义了一系列车辆的特殊状态。如果数据某一位被置1,那么表示车辆处于该位对应的状态。当至少有一种对应状态被激活或者从激活状态恢复,该标志数值才应该被设置和交互。
当车辆收到一个包含车辆特殊状态的数据后,需要根据数据的内容,来选择特定的操作。
车辆特殊状态定义如下。
——Hazard Lights:车辆警示灯亮起。
——Stop Line Violation:车辆在到达路口前预测自己可能会来不及刹车而越过停止线。
——ABS:ABS系统被触发并超过100毫秒。
——Traction Control:电子系统控制牵引力被触发并超过l00毫秒。
——Stability Control:车身稳定控制被触发并超过100毫秒。
——Hazardous Materials:危险品运输车。
——Hard Braking::车辆急刹车,并且减速度大于0.4G。
——Lights Changed:过去2秒内,车灯状态改变。
——Wipers Changed:过去2秒内,车辆雨刷(前窗或后窗)状态改变。
——F1 at tire:车辆发现至少1个轮胎爆胎了。
——Disabled Vehicle:车辆故障,无法行驶。
——Air Bag Deployment:至少1个安全气囊弹出。
【ASN.1代码】
VehicleEventFlags ::= BIT STRING{
eventHazardLights (0),
eventStopLineViolation (1),--Intersection Violation
eventABSactivated (2),
eventTractionControlLoss (3),
eventStabilityControlactivated (4),
eventHazardousMaterials (5),
eventReserved1 (6),
eventHardBraking (7),
eventLightsChanged (8),
eventWipersChanged (9),
eventFlatTire (10),
eventDisabledVehicle (11),--The DisabledVehicle DF may also be sent
eventAirBagDeployment (12)
}(SIZE(13,..))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
6.2.4.80 DE VehicleHeight
【定义】
车辆车身高度。
分辨率为5cm。
数值0表示无效数据。
【ASN.1代码】
VehicleHeight ::= INTEGER (0..127)
--Units of 5 cm,range to 6.35 meters
- 1
- 2
6.2.4.81 DE VehicleLength
【定义】
车辆车身长度。
分辨率为1cm。
数值0表示无效数据。
【ASN.1代码】
VehicleLength ::= INTEGER (0..4095)
--Units of 1 cm with a range of >40meters
- 1
- 2
6.2.4.82 DE VehicleWidth
【定义】
车辆车身宽度。
分辨率为1cm。
数值0表示无效数据。
【ASN.1代码】
VehicleWidth ::= INTEGER (0..1023)
--Units are 1 cm with a range of >10 meters
- 1
- 2
6.2.4.83 DE VerticalAcceleration
【定义】
定义Z轴方向的加速度大小,Z轴方向竖直向下,沿着Z轴方向为正。
分辨率为0.02G,G为重力加速度值9.80665m/s2。
【ASN.1代码】
VerticalAcceleration ::= INTEGER(-127..127)
--Units of 0.02 G steps over -2.52 to +2.54 G
--The value +127 shall be used for ranges >=2.54 G
--The value -126 shall be used for ranges <2.52 G
--The value -127 shall be used for unavailable
- 1
- 2
- 3
- 4
- 5
6.2.4.84 DE Vertoffset-B07
【定义】
7比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10cm。
-64数值表示未知大小。
【ASN.1代码】
Vertoffset-B07 ::= INTEGER (-64..63)
--Units of 10 cm
--with a range of +-6.3 meters vertical
--value 63 to be used for 63 or greater
--value -63 to be used for -63 or greater
--value -64 to be unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.85 DE Vertoffset-B08
【定义】
8比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10cm。
-128数值表示未知大小。
【ASN.1代码】
Vertoffset-B08 ::= INTEGER (-128..127)
-- Units of 10 cm
-- with a range of +-12.7 meters vertical
-- value 127 to be used for 127 or greater
-- value -127 to be used for -127 or greater
-- value -128 to be unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.86 DE Vertoffset-B09
【定义】
9比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10cm。
-256数值表示未知大小。
【ASN.1代码】
Vertoffset-B09 ::= INTEGER (-256..255)
--Units of 10 cm
--with a range of +-25.5 meters vertical
--value 255 to be used for 255 or greater
--value -255 to be used for -255 or greater
--value -256 to be unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.87 DE Vertoffset-B10
【定义】
10比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10cm。
-512数值表示未知大小。
【ASN.1代码】
Vertoffset-B10 ::= INTEGER (-512..511)
--Units of 10 cm
--with a range of +-51.1 meters vertical
--value 511 to be used for 511 or greater
--value -511 to be used for -511 or greater
--value -512 to be unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.88 DE Vertoffset-B11
【定义】
11比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10cm。
-1024数值表示未知大小。
【ASN.1代码】
Vertoffset-B11 ::= INTEGER (-1024..1023)
--Units of 10 cm
--with a range of +-102.3 meters vertical
--value 1023 to be used for 1023 or greater
--value -1023 to be used for -1023 or greater
--value -1024 to be unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.89 DE Vertoffset-B12
【定义】
12比特的数据,定义垂直方向(Z轴)关于参考位置点的偏差。顺着Z轴方向为正。
数据分辨率为10cm。
-2048数值表示未知大小。
【ASN.1代码】
Vertoffset-B12 ::= INTEGER (-2048..2047)
--Units of 10 cm
--with a range of +-204.7 meters vertical
--value 2047 to be used for 2047 or greater
--value -2047 to be used for -2047 or greater
--value -2048 to be unavailable
- 1
- 2
- 3
- 4
- 5
- 6
6.2.4.90 DE YawRate
【定义】
车辆横摆角速度。指汽车绕垂直轴的偏转,该偏转的大小代表汽车的稳定程度。如果偏转角速度达到一个阈值,说明汽车发生测滑或者甩尾等危险工况。
顺时针旋转为正,逆时针为负。
数据分辨率为0.01°/s。
【ASN.1代码】
YawRate ::= INTEGER (-32767..32767)
--Units of 0.01 degrees per second (signed)
- 1
- 2
7 应用层数据交互标准及接口规范
7.1 应用层数据接口
应用层数据接口主要包括与系统应用对接的应用程序编程接口(API)和与不同通信设备对接的服务提供者接口(SPI)。其中应用程序编程接口(API)可以让不同的应用开发者独立开发能实现互联互通的应用,而无需担心使用的通信方式或者通信设备,也无需担心通信功能是通过调用本机驱动来实现,或者通过通信调用远程的通信模块来实现。服务提供者接口(SPI)可以实现车用通信系统与不同通信方式或者通信设备的兼容,并满足通信技术不断更新的需求。如图46所示。
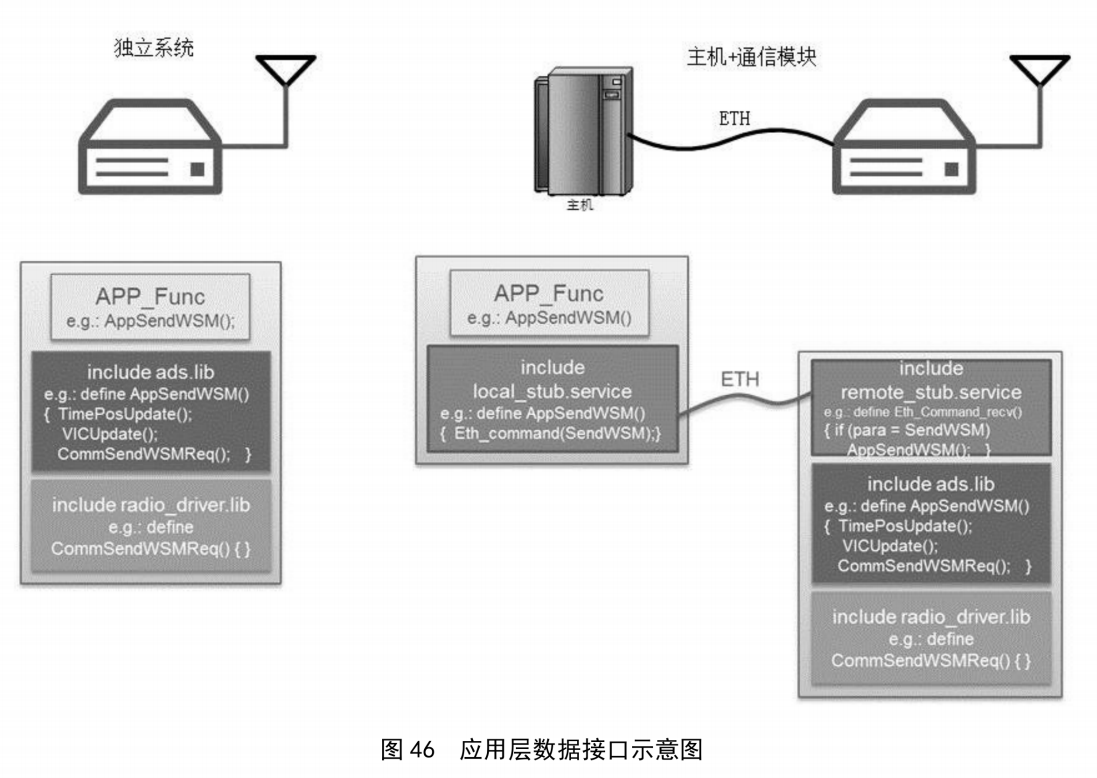
7.2API接口
7.2.1AP1接口一览表
API接口一览见表21。

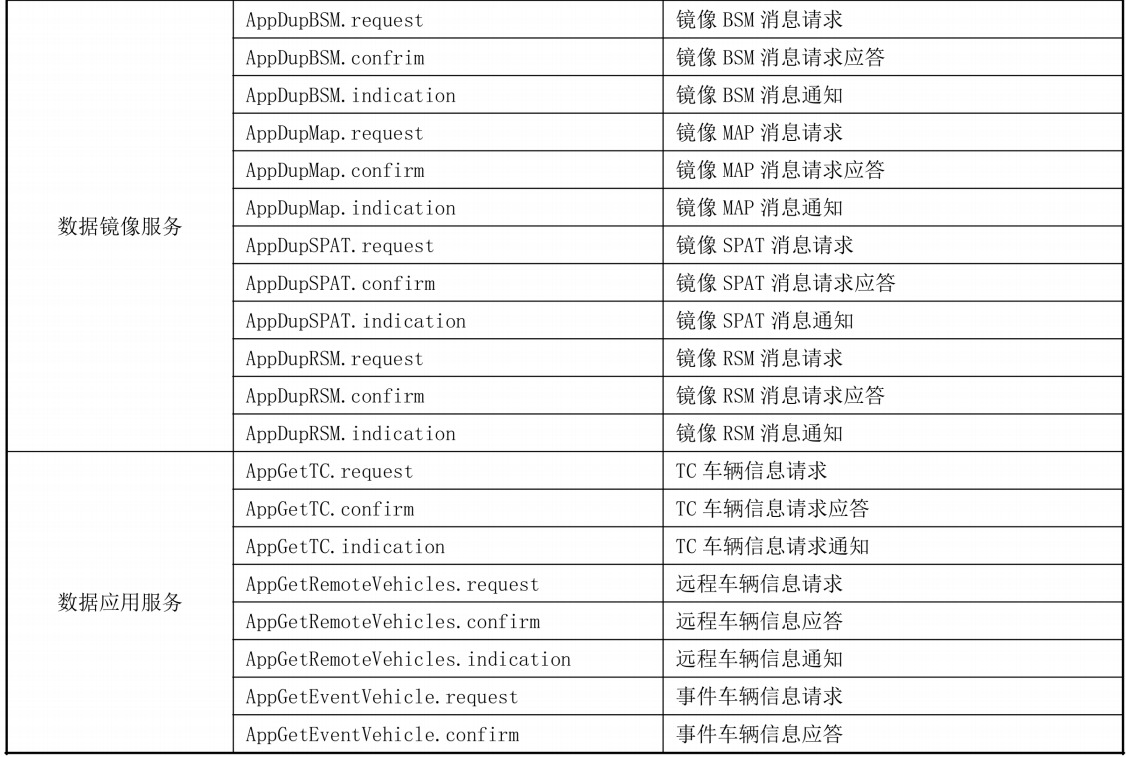
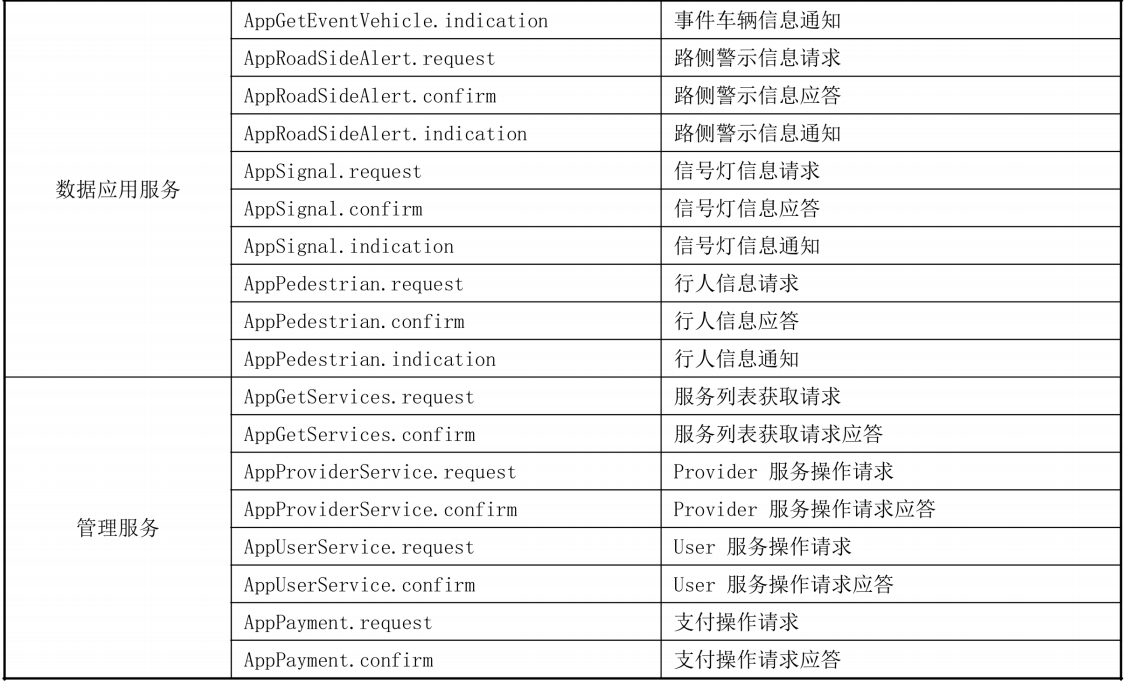
7.2.2API接口功能描述
7.2.2.1 AppGetHostInfo.request
应用层通过该原语获取本设备的数据请求,包括:
一一车辆。车辆的ID、车速、GNSS等基本属性:
一一基础设备。基础设施的功能,D等基本属性。
7.2.2.2 AppGetHostInfo.confirm
功能描述如下:
——接受请求:返回相关信息:
——拒绝请求:返回拒绝理由。
7.2.2.3 AppGetHostStatus.request
应用层通过该原语获取本设备的状态,包括:
——车辆,车身CAN通信、定位系统等状态信息;
——基础设施的状态。
7.2.2.4 AppGetHostStatus.confirm
功能描述如下:
——接受请求:返回相关信息
——拒绝请求:返回拒绝理由。
7.2.2.5 AppSetCommCfg.request
应用层通过该原语对底层通信参数进行配置,包括通信的模式、通道等参数。
7.2.2.6 AppSetCommCfg.confirm
功能描述如下:
——接受请求:返回相关信息;
——拒绝请求:返回拒绝理由。
7.2.2.7 AppGetCommStatus.request
应用层通过该原语获取底层通信状态属性及状态信息请求,包括通信类型、参数、性能属性等。
7.2.2.8 AppGetCommStatus.confirm
功能描述如下:
——接受请求:返回相关信息;
——拒绝请求:返回拒绝理由。
7.2.2.9 AppDSMInit.request
应用层通过该原语进行DSM消息初始化请求,设置通道,发送、接收参数等。
7.2.2.10 AppDSMInit.confrim
功能描述如下:
——接受请求:允许DSM数据发送与接收,并成功配置参数;
——拒绝请求:返回拒绝理由。
7.2.2.11 AppDSMTerminate.request
应用层通过该原语请求DSM消息终止服务。
7.2.2.12 AppDSMTerminate.request
功能描述如下:
——接受请求:终止DSM数据发送与接收;
——拒绝请求:返回拒绝理由。
7.2.2.13 AppSendDSMMsg.request
应用层通过该原语进行DSM消息发送请求。
7.2.2.14 AppSendDSMMsg.confirm
功能描述如下:
——接受请求:发送成功
——拒绝请求:发送失败,失败理由。
7.2.2.15 AppDupBSM.request
应用层通过该原语请求直接访问BSM消息,可以配置查询方式或者中断方式。
7.2.2.16 AppDupBSM.confrim
功能描述如下:
——接受请求:返回镜像BSM消息到上层应用;
——拒绝请求:返回拒绝理由。
7.2.2.17 AppDupBSM.indication
BSM消息通知到上层应用,BSM消息内容参照应用层标准。
7.2.2.18 AppDupMap.request
应用层通过该原语请求直接访问MAP消息,可以配置查询方式或者中断方式。
7.2.2.19 AppDupMAP.confr im
功能描述如下:
——接受请求:返回镜像MAP消息到上层应用;
——拒绝请求:返回拒绝理由。
7.2.2.20 AppDupMAP.indication
MAP消息通知到上层应用,MAP消息内容参照应用层标准。
7.2.2.21 AppDupSPAT.request
应用层通过该原语请求直接访问SPAT消息,可以配置查询方式或者中断方式。
7.2.2.22 AppDupSPAT.confr im
功能描述如下:
——接受请求:返回镜像SPAT消息到上层应用;
——拒绝请求:返回拒绝理由。
7.2.2.23 AppDupSPAT.indi cation
SPAT消息通知到上层应用,SPAT消息内容参照应用层标准。
7.2.2.24 AppDupRSM.request
应用层通过该原语请求直接访问RSM消息,可以配置查询方式或者中断方式。
7.2.2.25 AppDupRSM.confrim
功能描述如下:
——接受请求:返回镜像RSM消息到上层应用:
——拒绝请求:返回拒绝理由。
7.2.2.26 AppDupRSM.indication
RSM消息通知到上层应用,RSM消息内容参照应用层标准。
7.2.2.27 AppGetTC.request
应用层通过该原语请求访问TC服务中的车辆信息,可以配置查询方式或者中断方式获取TC中的车辆
信息,可以指定一个或者多个TC区域。
7.2.2.28 AppGetTC.confirm
功能描述如下:
——接受请求:返回相应TC区域的车辆信息;
——拒绝请求:返回拒绝理由。
7.2.2.29 AppGetTC.indication
指定TC有更新车辆时,返回信息到应用层。
7.2.2.30 AppGetRemoteVehicles.request
应用层通过该原语以指定车辆ID的方式请求指定一个或者一组车辆的BSM信息。
7.2.2.31 AppGetRemoteVehicles.confirm
功能描述如下:
——接受请求:返回指定车辆详细信息确认;
——拒绝请求:返回拒绝理由。
7.2.2.32 AppGetRemoteVehicles.indication
指定车辆信息BSM有更新时通知到上层应用。
7.2.2.33 AppGetEventVehicle.request
应用层通过该原语请求访问周边的事件车辆,可以配置查询方式或者中断方式访问一种或者多种事件或状态,事件车辆包括紧急刹车、异常车辆、失控车辆等特殊事件激活或者救护车、警车等特殊状态激活的车辆。
7.2.2.34 AppGetEventVehicle.confirm
功能描述如下:
——接受请求:返回应用层事件车辆信息;
——拒绝请求:返回拒绝理由。
7.2.2.35 AppGetEventVehicle.indication
当接收到远端车辆具有指定事件或者状态时,返回相关信息于上层应用。
7.2.2.36 AppRoadSideAlert.request
应用层通过该原语请求访问周边指定的路侧警示信息,可以配置查询方式或者中断方式。
7.2.2.37 AppRoadSideAlert.confirm
功能描述如下:
——接受请求:返回上层应用路侧单元警告消息;
一一拒绝请求:返回拒绝理由。
7.2.2.38 AppRoadSideAlert.indication
路侧单元警示消息有更新时通知上层应用。
7.2.2.39 AppSignal.request
应用层通过该原语请求访问周边指定的信号灯信息,可以配置查询方式或者中断方式。
7.2.2.40 AppSignal.confirm
功能描述如下:
——接受请求:返回信号灯状态信息:
——拒绝请求:返回决绝理由。
7.2.2.41 AppSignal.indication
信号灯信息有更新时通知应用层。
7.2.2.42 AppPedestrian.request
应用层通过该原语请求访问周边的行人信息,可以配置查询方式或者中断方式。
7.2.2.43 AppPedestrian.confirm
功能描述如下:
——接受请求:返回行人相关信息;
——拒绝请求:返回拒绝理由。
7.2.2.44 AppPedestr ian.indication
行人信息有更新时通知应用层。
7.2.2.45 AppGetServices.request
该原语表明上层请求获取当前设备所有服务列表详细信息。接收后,ADS产生AppGetServices…confirm,表明请求是否被接受。
7.2.2.46 AppGetServices.confirm
该原语确定接收到上层对应的请求,用于回应AppGetService.request。如果接受请求,返回请求的相关详细信息;如果拒绝请求,则返回拒绝理由。
7.2.2.47 AppProviderService.request
该原语表明上层对Provider服务的操作请求。接受后ADS产生AppProviderService…confirm,表明请求是否被接收。
7.2.2.48 AppProviderService.confirm
该原语确定接收到上层对应的请求,用于回应AppProviderService.request。如果接受请求,则执行对应的操作,并返回操作结果;如果拒绝请求,则返回拒绝理由。
7.2.2.49 AppUserService.request
该原语表明上层对User服务的操作请求。接受后ADS产生AppUserService.confirm,表明请求是否被接收。
7.2.2.50 AppUserService.confirm
该原语确定接收到上层对应的请求,用于回应AppUserService.request。如果接受请求,则执行对应的操作,并返回操作结果;如果拒绝请求,则返回拒绝理由。
7.2.2.51 AppPayment.request
该原语表明上层对支付操作的请求,接受后产生AppPayment…confirm,表明请求是否被接收。
7.2.2.52 AppPayment.conf irm
该原语确定接收到上层对应的请求,用于回应AppPayment.request。如果接受请求,则执行对应的操作;如果拒绝请求,则返回拒绝理由。
7.3SP1接口
7.3.1SP1接口一览表
SPI接口一览见表22。
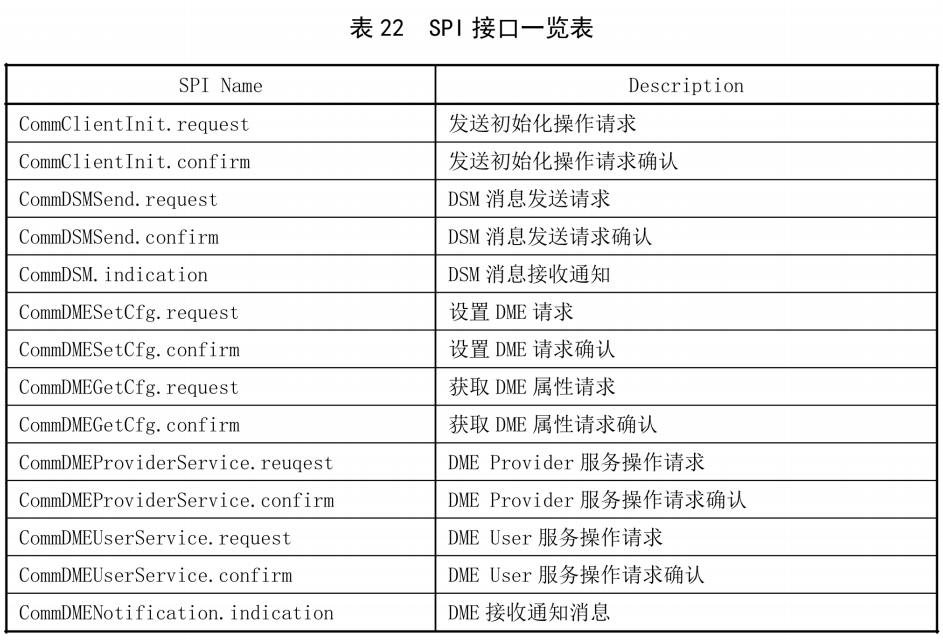
7.3.2SP1接口功能描述
7.3.2.1 CommClientInit.request
该原语表明上层请求进行对应消息类型的发送初始化操作,接收后,产生CommClientInit.confirm,表明是否被接受。
7.3.2.2 CommClientInit.confirm
该原语表明接收上层对应的请求,用于回应CommClientInit.request。如果接受请求,则返回初始化之后的相关信息;如果拒绝请求,则返回拒绝理由。
7.3.2.3 CommDSMSend.request
该原语表明上层请求进行DSM消息发送请求,接收后,产生CommSDMSend.confirm,表明是否被接受。
7.3.2.4 CommDSMSend.confirm
该原语表明接收上层对应的请求,用于回应CommDSMSend.request,并返回对应请求结果。
7.3.2.5 CommDSM.indication
该原语用于底层向上层提交DSM消息。
7.3.2.6 CommDMESetCfg.request
该原语表明上层请求设置DME请求,接收后,产生CommDMESetCfg.confirm。
7.3.2.7 CommDMESetCfg.confirm
该原语表明接收上层对应的请求,用于回应CommDMESetCfg.request,如果接受,并返回对应请求结果;如果决绝,则返回决绝理由。
7.3.2.8 CommDMEGetCfg.request
该原语表明上层请求获取DME请求,接收后,产生CommDMEGetCfg.confirm,表明操作结果。
7.3.2.9 CommDMEGetCfg.confirm
该原语表明接收上层对应的请求,用于回应CommDMEGetCfg.request,如果接受,并返回对应请求结果;如果拒绝,则返回拒绝理由。
7.3.2.10 CommDMEProviderService.reuqest
该原语表明上层对DME Provider服务的操作请求。接收后,产生CommDMEProviderService.confirm,表明操作结果。
7.3.2.11 CommDMEProviderService.confirm
该原语表明接收上层对应的请求,用于回应CommDMEProviderService.request。如果接受,则执行对应操作,并返回操作结果;如果拒绝,则返回拒绝理由。
7.3.2.12 CommDMEUserService.request
该原语表明上层对DME User服务的操作请求。接收后,产生CommDMEUserService.confirm,表明操作结果。
7.3.2.13 CommDMEUserService.confirm
该原语表明接收上层对应的请求,用于回应CommDMEUserService…request。如果接受,则执行对应操作,并返回操作结果;如果拒绝,则返回拒绝理由。
7.3.2.14 CommDMENot ification.indication
该原语用于底层向上层提交DME通知。
附录A(资料性)一期应用评选方法
本文件一期应用的选择,采用工作组内部征集和投票的方式。首先在工作组内部征集典型V2X应用,再由工作组各成员对征集的应用进行投票,最后根据各个应用得票数确定一期应用。
共有20家工作组成员单位参与了一期应用的征集和评选,这20家单位的行业领域分布如下:
——汽车制造商(OEM):5
——研究机构:5
——高校:2
——通信企业:3
——ITS设备及解决方案供应商:2
——数据服务商:2
——金融机构:1
首先,在工作组内进行应用征集,共统计出40个典型V2X应用,涵盖安全、效率、信息服务三大类,其中安全类19个,效率类12个,信息服务类9个。然后由20家成员单位从技术成熟度、应用价值及近期可实现性三个维度,对40个V2X应用进行投票,每个成员限投15个。最后根据得票数,并综合考虑应用的典型性,确定17个一期应用,其中安全类12个,效率类4个,信息服务类1个。具体应用征集和投票结果见表A.1。
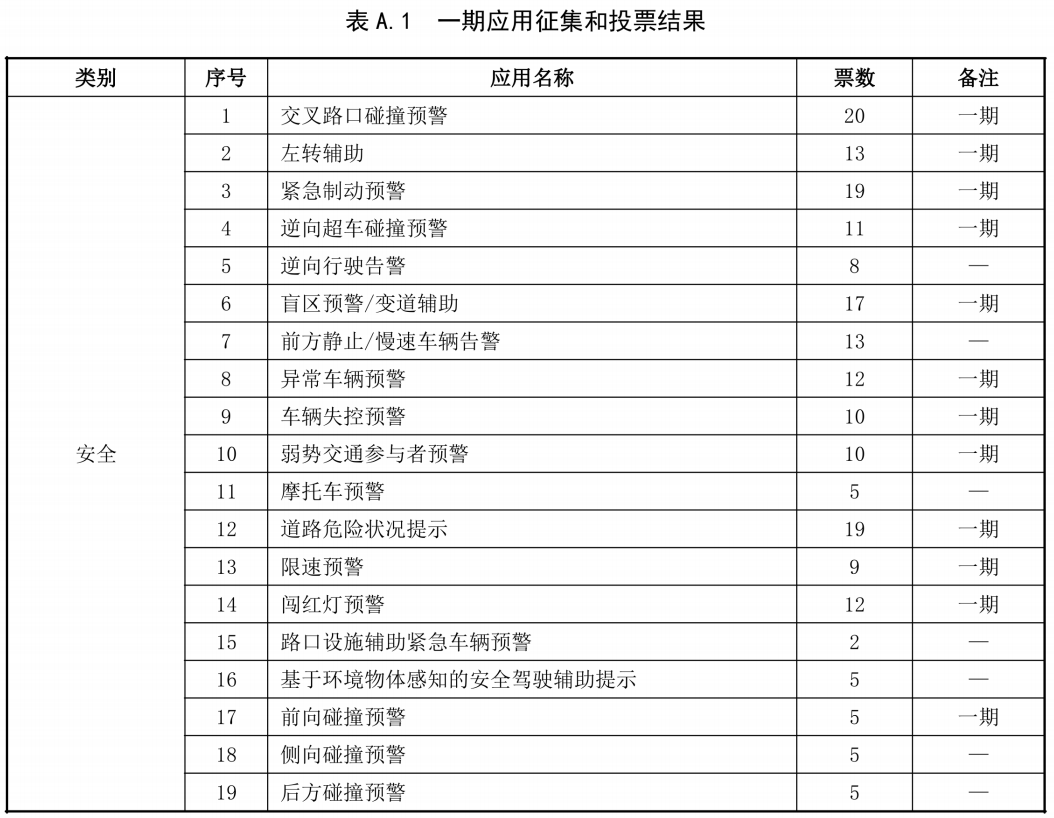
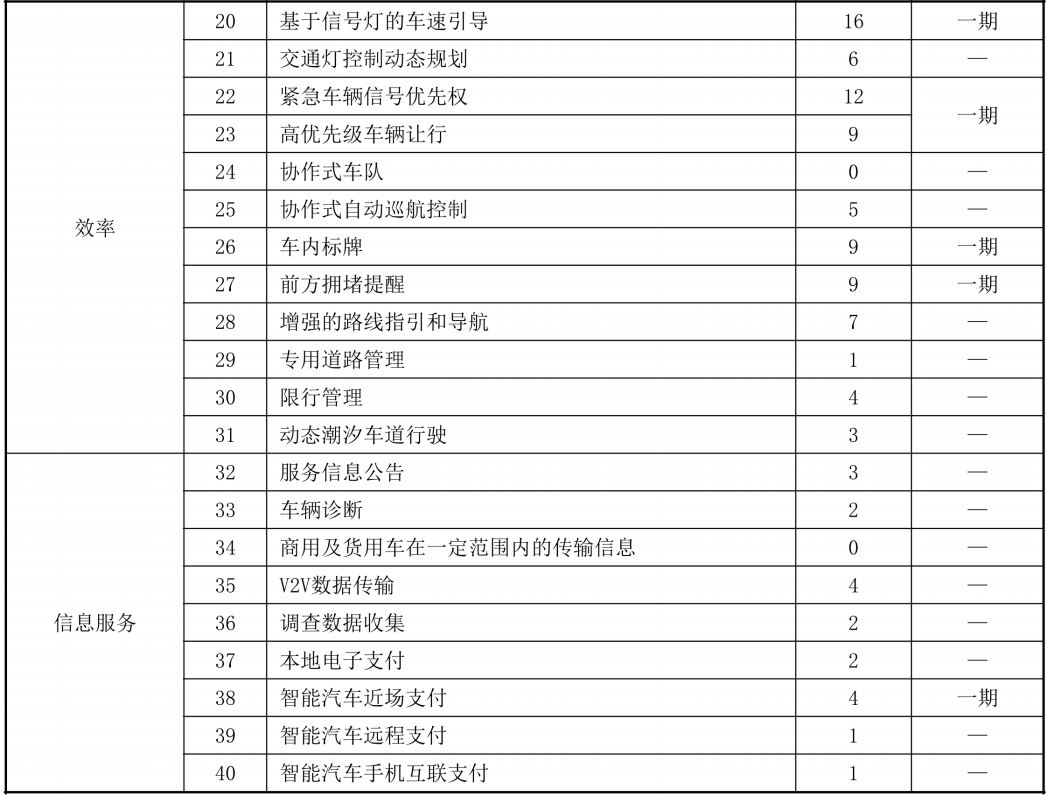
附录B(资料性)一期应用按通信需求分类表
根据应用对通信频率和时延的不同需求将17个一期应用分为两大类:一是高时延(>100ms)、低频率(<10Hz)的应用,可通过4G蜂窝通信技术实现;二是低时延(≤100ms)、高频率(≥10Hz)的应用,需要LTE-V2X、DSRC或5G通信技术的支持才能实现。见表B.1。

附录C(规范性)前向碰撞预警(FCW)基本性能指标依据
C.1FCW交互流程
FCW交互流程如表C.1。
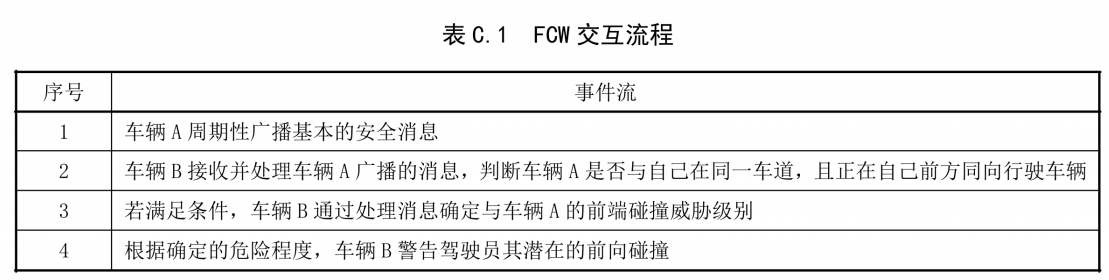
C.2指标依据说明
基本性能指标依据如下:
——数据更新频率、系统延迟参照J2735、J2945及NHTSA VSC-A性能指标说明:
——通信距离≥300m;
采用车辆间最小安全距离模型,说明车辆制动过程如图C.1所示。
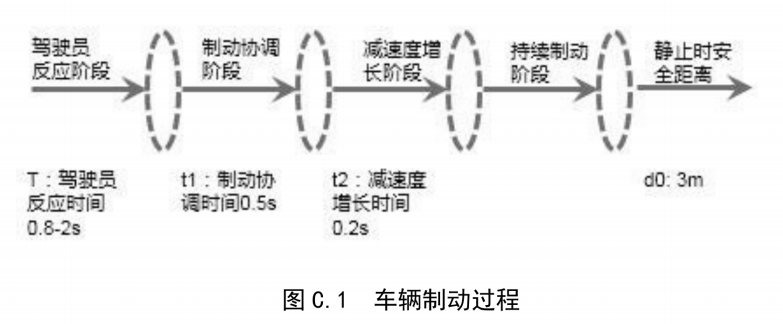
根据汽车制动动力学,最小安全距离模型如下:

假设两车间的速度差为100km/h,驾驶员反应时间为2s,车辆制动安全的加速度大小为取值为3.6m/s2;则最小安全距离为182m。这是在考虑两车速度相差比较大及驾驶员反应比较慢的情况下,因此通信距离300m足够满足碰撞预警的要求定位精度≤1.5m。
前向碰撞预警需筛选出位于“前方同车道”区域的远车(V),涉及同一车道的判断。中国车道宽度为(2.753.5)m,取车道宽为3.5m。
假设自车(HV)在车道的中间行使,以车头位置的横纵坐标为基准:横向左右1.75m以内,HV之前的,称为前向(Ahead);横向左右1.75m,HV之后的,称为后向(Behind)。
基于上述需求,GSS定位精度需要满足1.5m的要求。

