
热门标签
热门文章
- 1unity3d中Link文件的含义_link preserve="all
- 2XSS漏洞及修复方案_xss漏洞修复
- 3计算机视觉算法中的双眼视觉(Binocular Vision)_left_image.jpg right_image.jpg
- 4C# FluentFTP v46.0.2 文档一_fluentftp精简版
- 5白话空间统计之:Moran's I(莫兰指数)
- 6第二弹,10000个龙年红包封面免费领取
- 7[Errno 111] Connection refused)_failed to establish a new connection: [errno 111]
- 8数字人技术发展和应用分析_数字人 csdn
- 9数据采集——爬虫篇(一):豆瓣电影TOP250详细信息采集
- 10c++单词接龙_单词接龙c++
当前位置: article > 正文
GAMES101学习笔记_games101笔记
作者:IT小白 | 2024-02-19 23:14:41
赞
踩
games101笔记
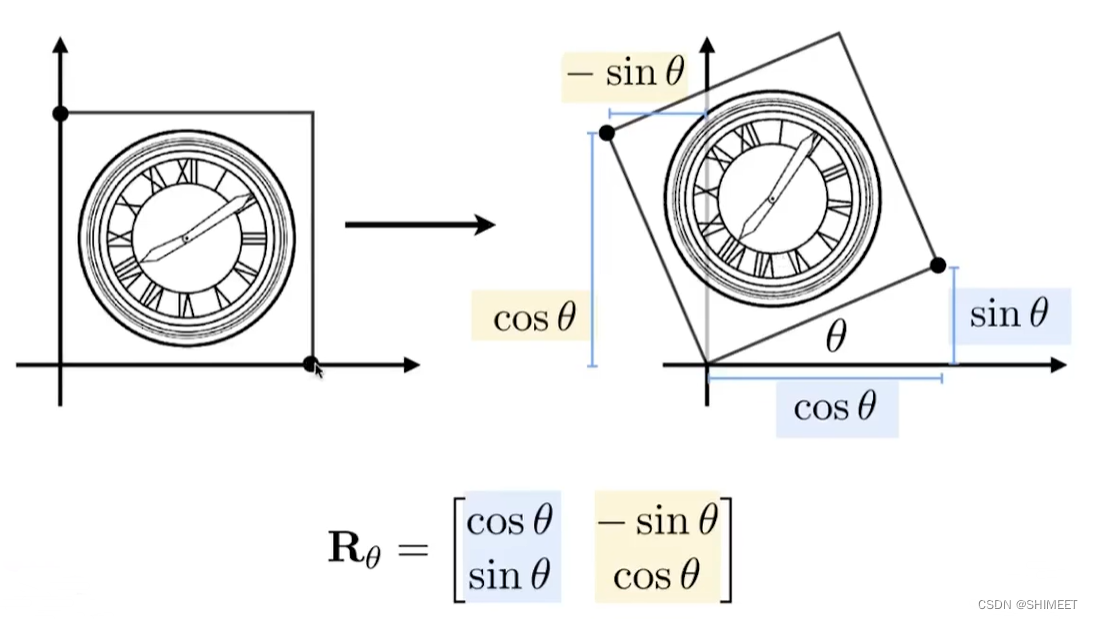
变换Transformation
2D Transformations

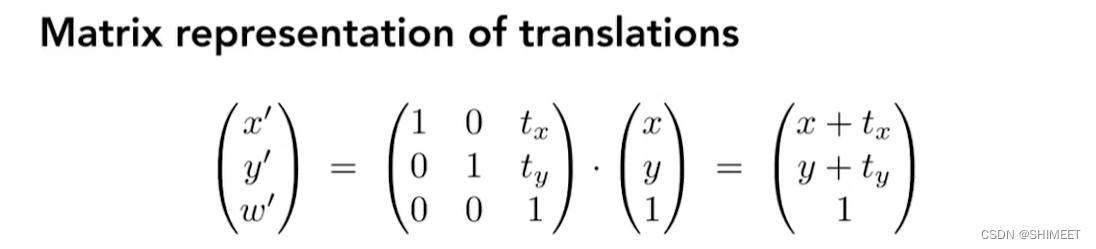
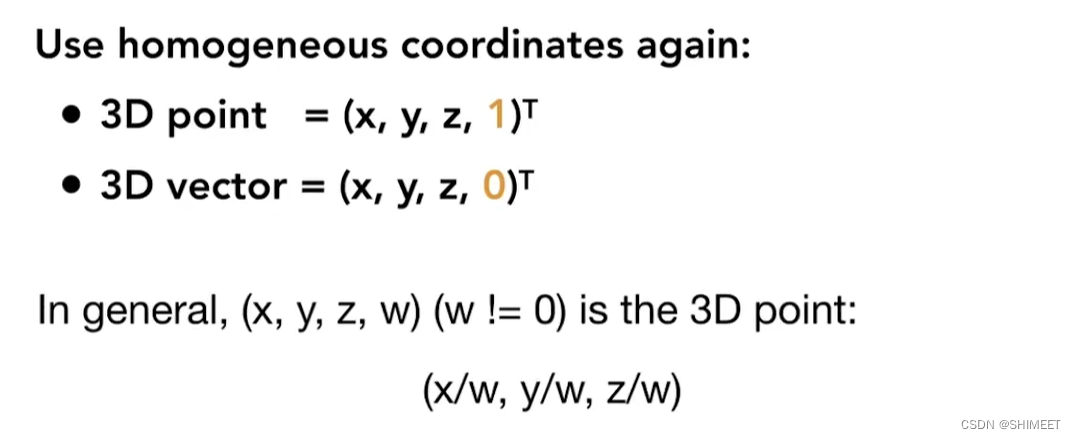
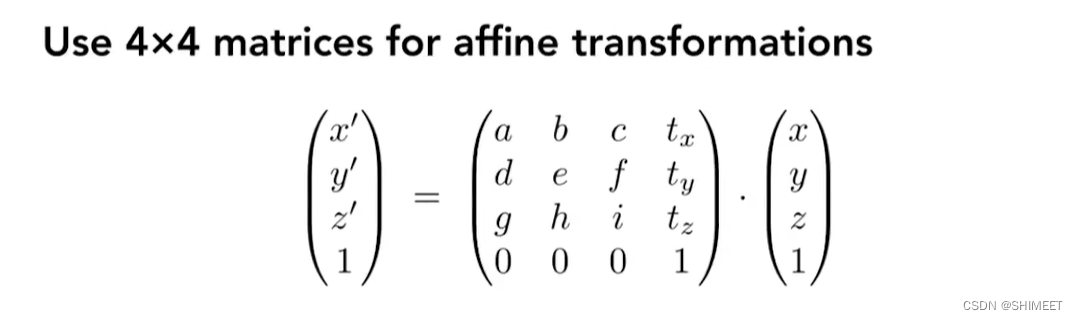
- 齐次坐标描述的矩阵
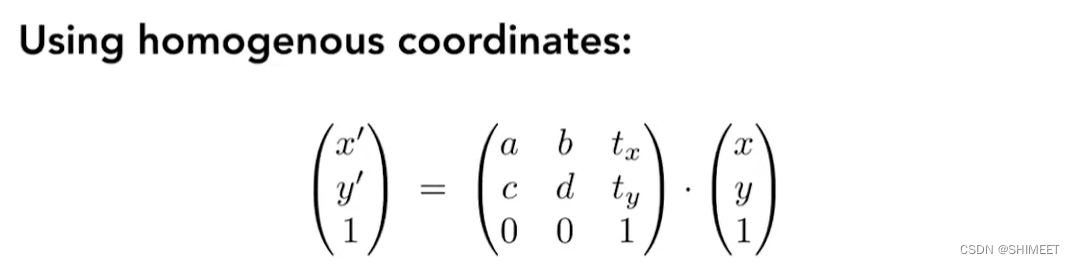
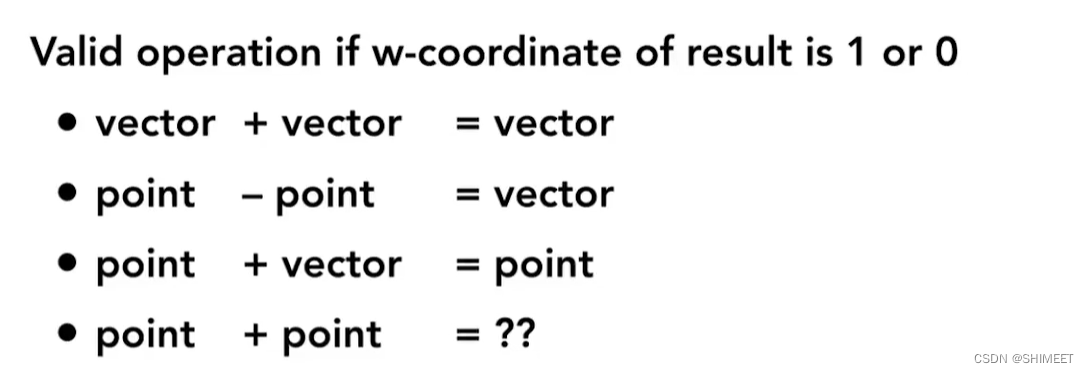
- 当w=0时,代表向量;当w≠0时,代表点(x/w, y/w, 1)

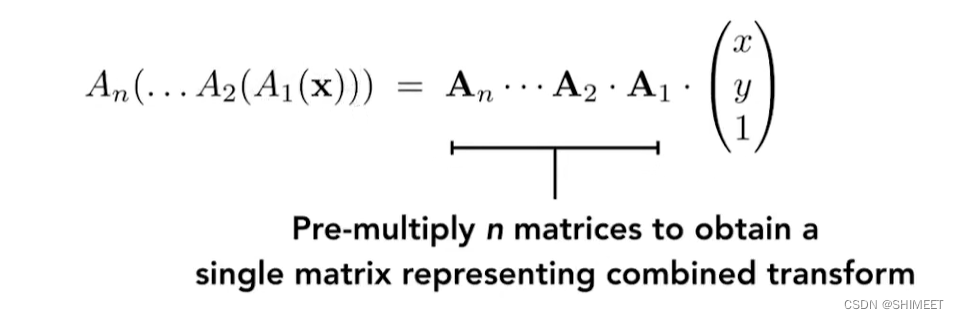
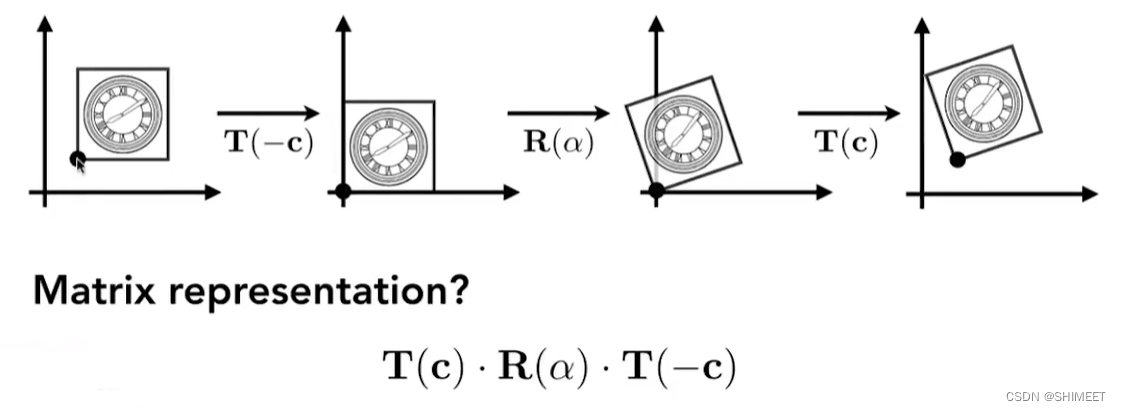
- 组合变换时,先缩放,再旋转,最后平移【矩阵乘法不满足交换律,但是满足结合律】
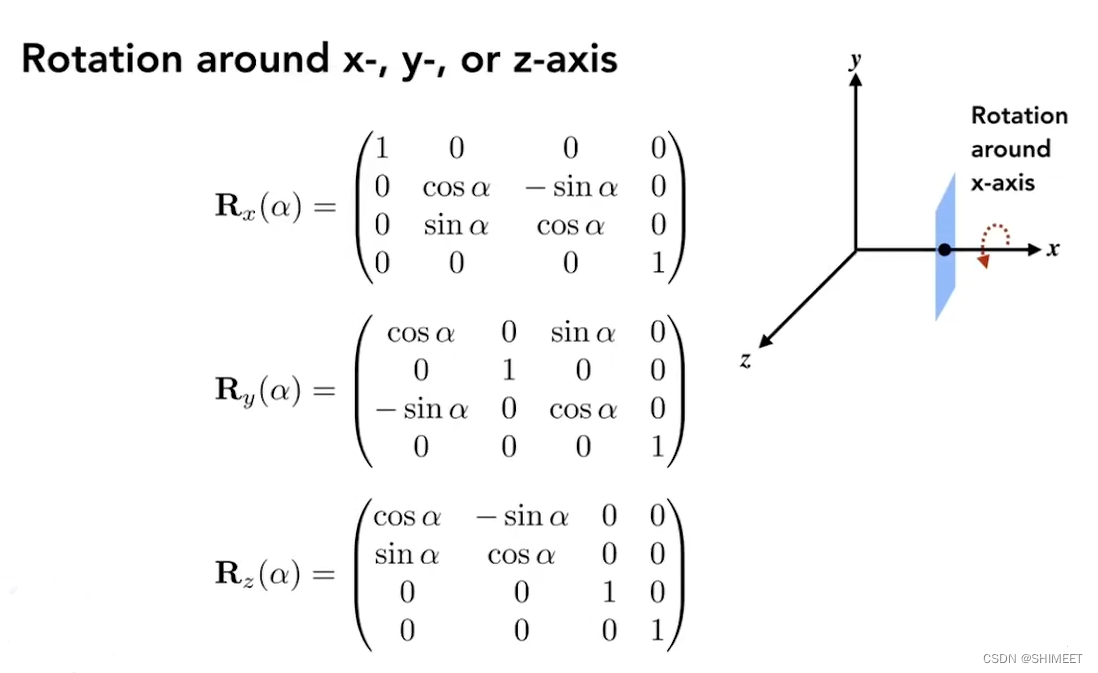
3D Transformations
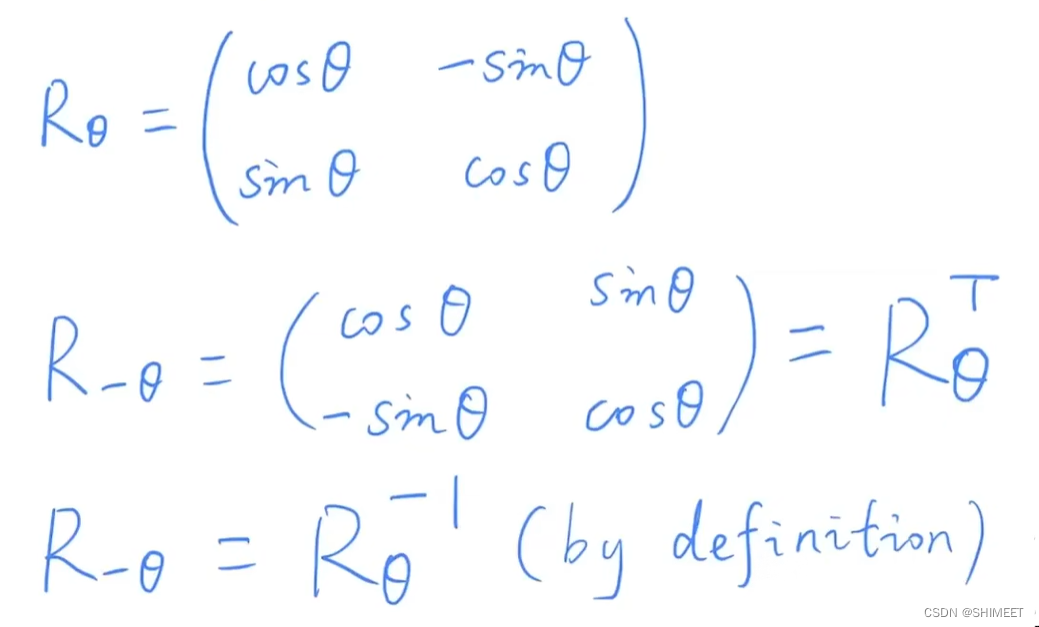
- 旋转矩阵是正交矩阵
- 旋转矩阵的逆=旋转矩阵的转置,即(Rθ)T=(Rθ)-1
Viewing(观测) Transformation
- View(视图)/Camera transformation
- Projection(投影) transformation
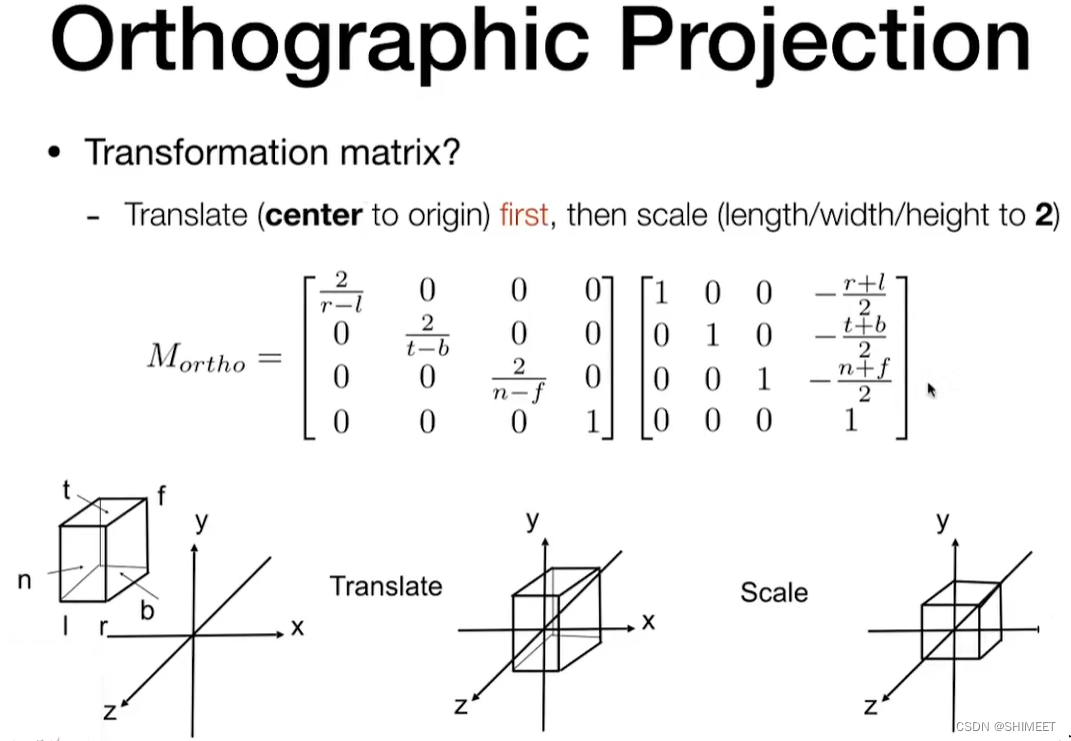
Orthographic(正交) projection
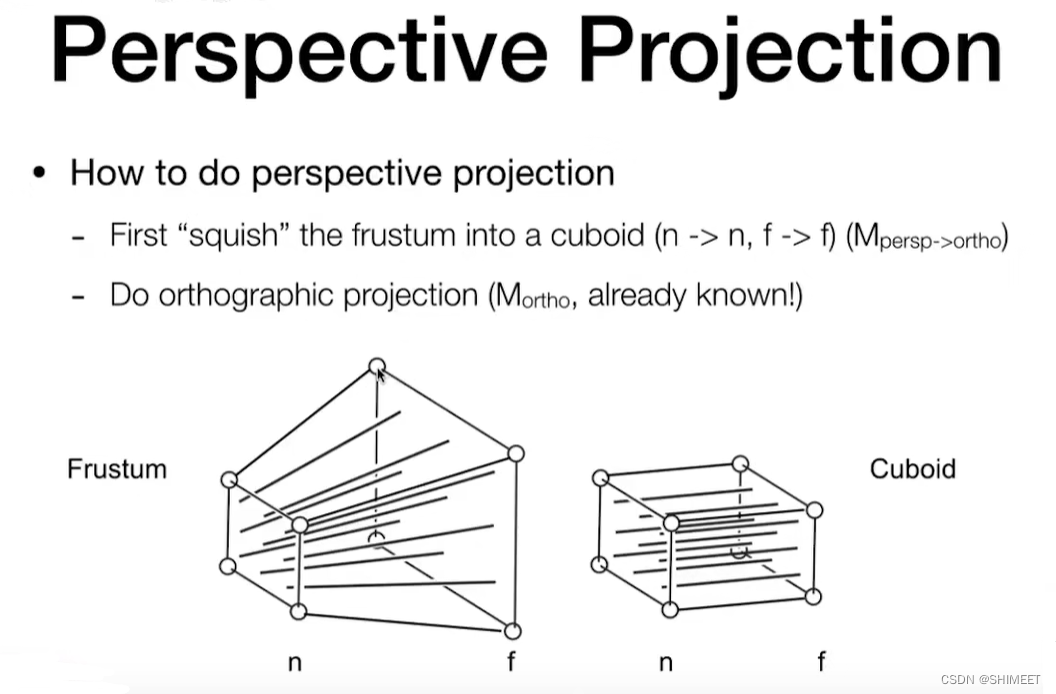
Perspective(透视) projection
y不同的原因:右手坐标系,【Y = Z x X】 ≠ 【Y = X x Z】
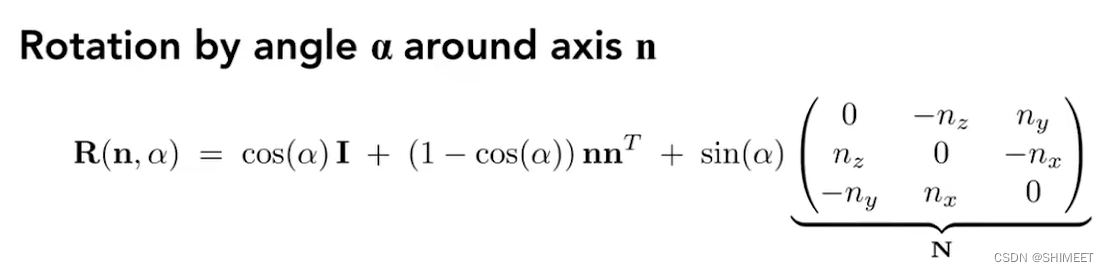
Rodrigues’ Rotation Formula 任意旋转矩阵,分解在3个轴

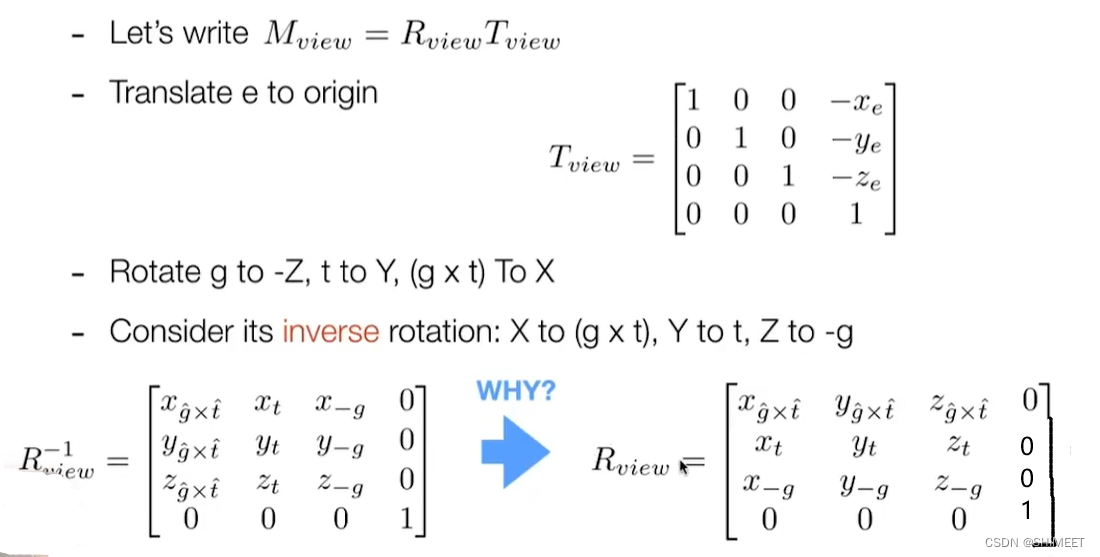
Viewing/Camera Transformation
相机位于原点,up轴为Y轴,朝向为-Z轴
Orthographic projection
Perspective projection
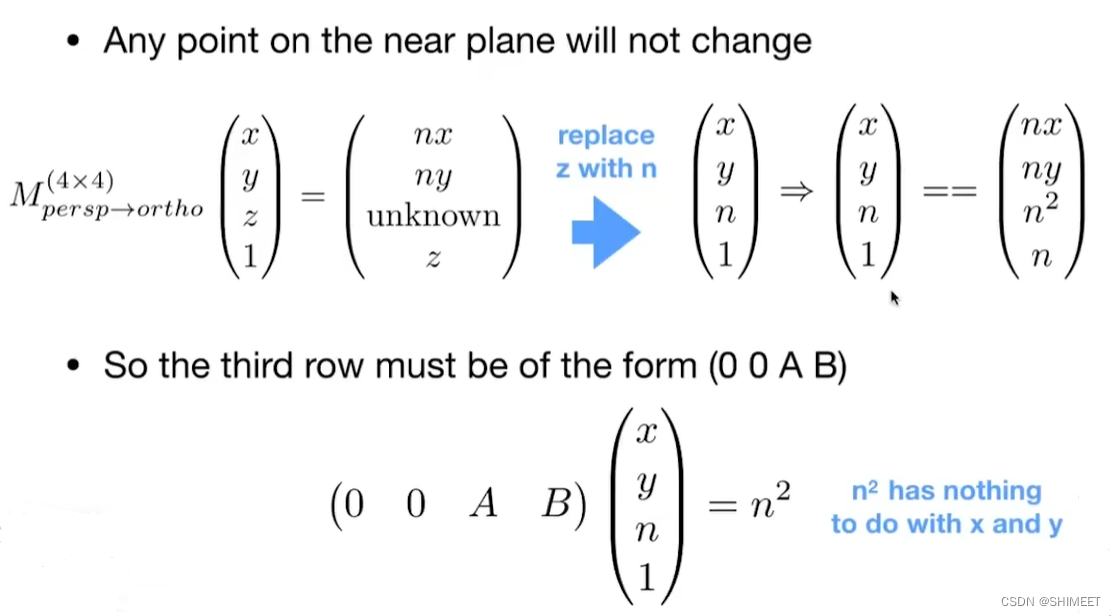
先"挤压"成正交投影,然后再执行正交投影
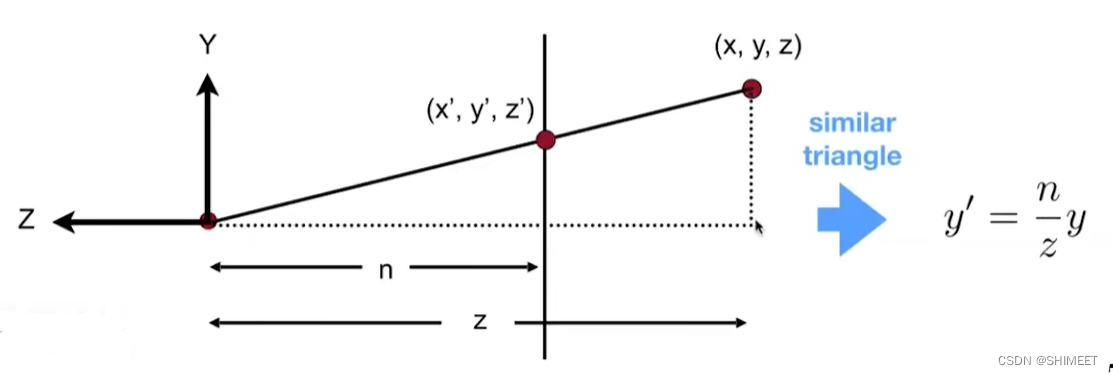
根据相似三角形得到
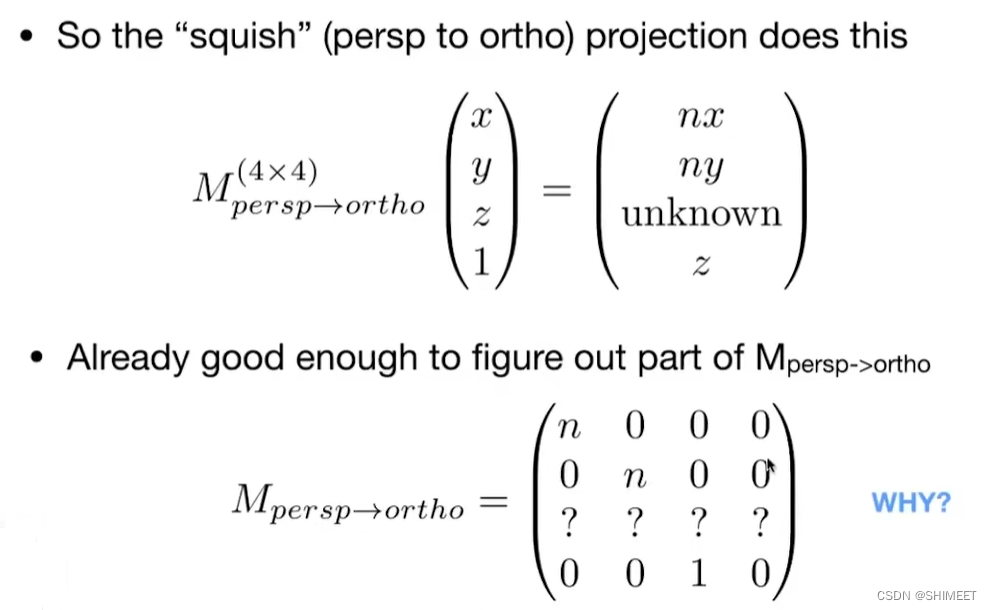
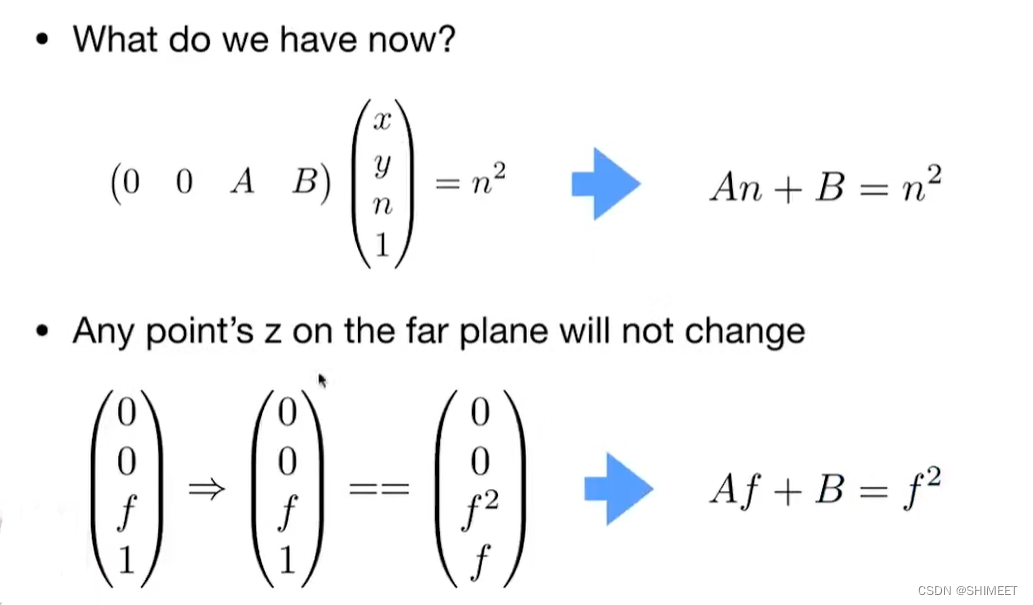
根据最近面上z不变得到
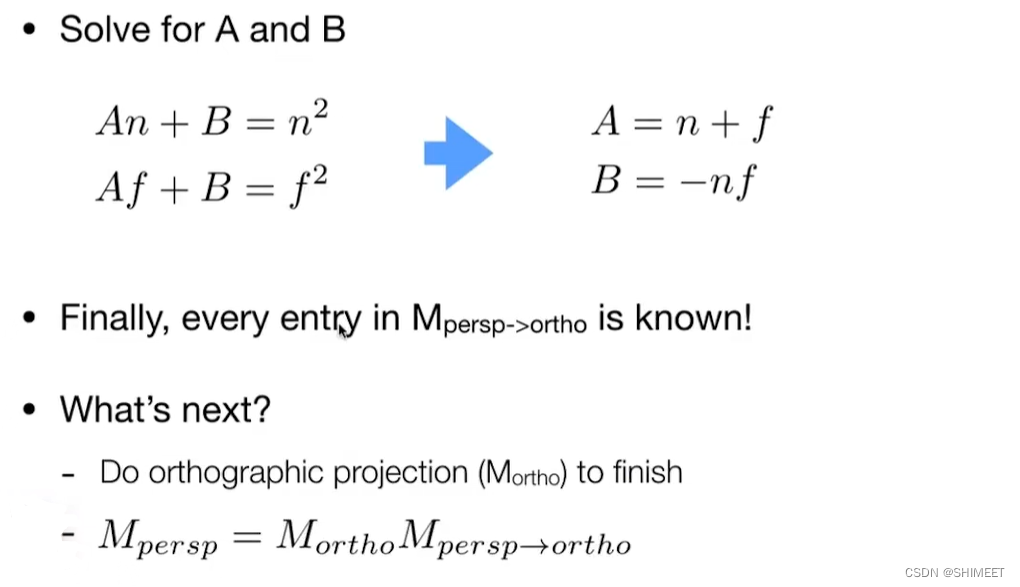
根据最远面上中心点位置不变得到
求解得到
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/117251
推荐阅读
相关标签

