
- 1python: turtle绘制有趣的小图像合集_发挥想象,突破思维局限,不断创新,制作turtle的优秀作品
- 2机器人教育在STEM课程中的设计研究_stem方法研究在机械方面的研究
- 3b+树时间复杂度_数据结构与算法——最小生成树
- 4【免费】教你如何通过《计算机操作系统师资培训(鸿蒙生态方向)》考核
- 5Openstack制作image镜像_openstack 创建image
- 6IDEA中运行SpringBoot+JSP项目,JSP页面无法访问问题_springboot启动后找不到index.jsp
- 7基于javaweb+mysql的springboot轻语音乐网平台(java+springboot+ssm+mysql+maven+html)_ssm,mysql在线音乐
- 8进阶数据库系列(二十):PostgreSQL 数据库备份与恢复
- 9鸿蒙win应用,效仿华为鸿蒙系统!微软放大招:新版Win10系统兼容安卓应用
- 10java.lang.IllegalStateException异常:简单的分析和简单解决方案
如何看待端到端自动驾驶?会是规划控制的未来吗?近10种规控算法与代码详解!...
赞
踩
自动驾驶一般分为感知、预测、规划和控制四大基础模块,各个模块各司其职、分工明确,今天汽车人就和大家聊聊规划控制。一般来说规划控制的目的有两个:
一是对车辆运动进行全局规划(从地点A到地点B运行路线)、行为决策(判断变道还是超车等)、局部规划(规划局部行驶轨迹,规避障碍物等);
二是精准控制车辆按规划轨迹行驶。
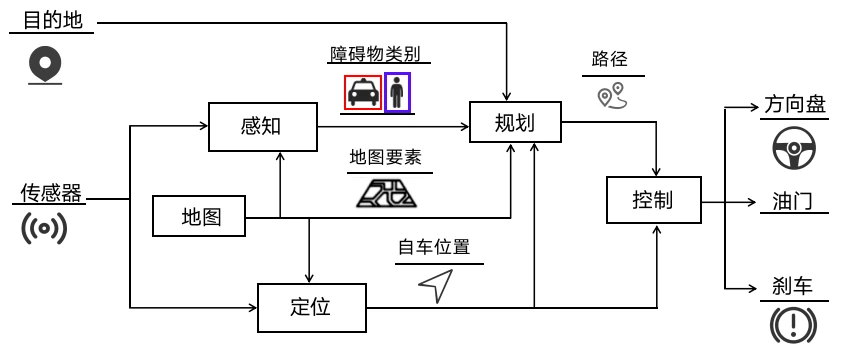
规划控制作为整个自动驾驶/机器人算法流程中最下游的模块,直接决定着自动驾驶的安全性及舒适度。一个好的规控直接影响司机和乘客的乘车体验:转弯是否顺畅、跟车时前车刹车本车如何处理、复杂路口汇车时能否及时汇入规划车道等等。
这些复杂控制的背后正是规控模块发挥着作用,很多刚入门的小伙伴一头雾水,规控到底是个啥?都有哪些子领域?每个领域又都包含哪些算法?这些算法如何实现?都有哪些优缺点?适用哪些场景?整体来说,车辆从路径规划开始,行进过程中根据感知和定位的信息做出相应决策(跟车、变道、加速等等)。接着根据上游决策的结果,运动规划模块实时输出对应的轨迹信息以及速度、加速度和方向盘转角信息,进而由控制模块执行相应控制。

而且随着国家大力支持新能源汽车行业的发展,各大企业也加大相关岗位人才招聘,刚看了某招聘网站,相关岗位平均月薪已达到4w以上,年薪60w。高级岗位年薪百万的也比比皆是!

早鸟不等人!扫码领取优惠加入学习!

学习难度大
整体来说,规划控制相比于感知对理论知识的要求较高。目前企业界的主流规控算法包括PID, LQR, MPC等控制算法,以及A*,Hybrid A*,Lattice Planner,EM Planner等等规划算法。这段时间,有很多小伙伴咨询规划控制的相关问题,其实我们对规划控制也很感兴趣,市面上已有的规划控制相关学习资料质量参差不齐,许多同学在资料搜集和入门学习的时候踩了较多坑:
规划控制算法类别很多,网上找不到系统学习的资料,刚入门的同学不知道从何下手,论文也看的一知半解...
不理解各类规划控制算法的优缺点是什么,不知道在不同的场景下要选择哪类算法
不知道业界现在缺少什么技术栈的人才,自学过程中容易把握不好方向
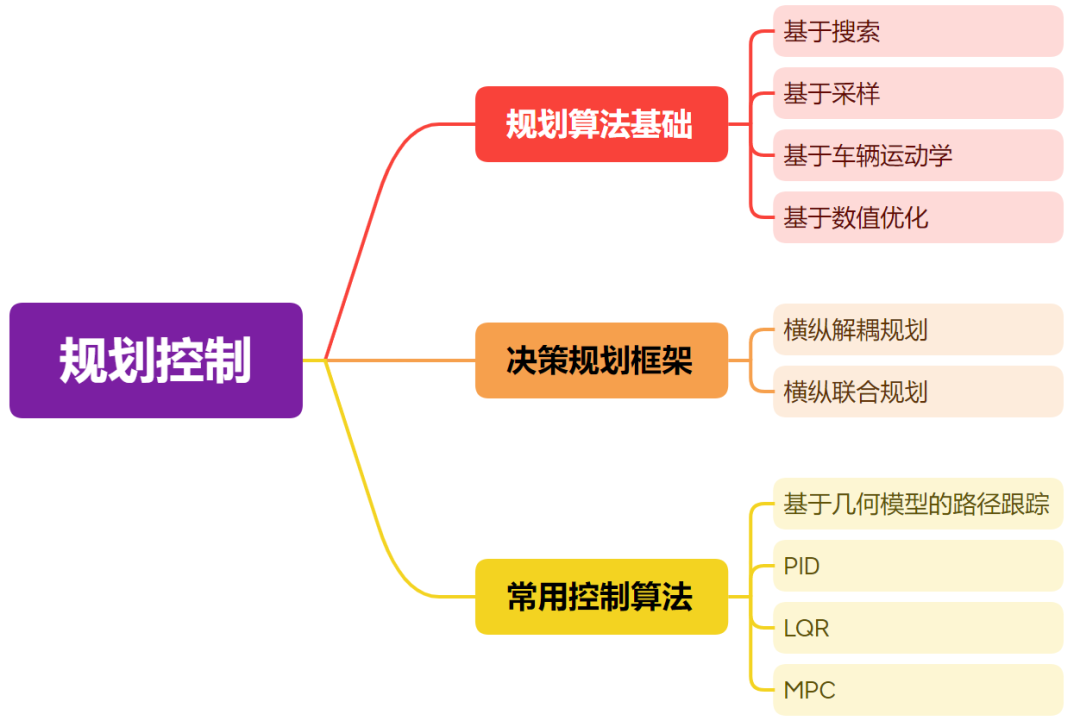
在分析大家在学习过程中的痛点之后,自动驾驶之心联合业内某大厂规控工程师共同打磨了《规划控制理论与实战课程》线上课程。如果你正想要入门规划控制,深入理解算法原理,或者需要提升这方面的技术能力,不知如何优化,同时又缺少项目实战经验,那么一定要学习下这门课,课程内容详细介绍了规划算法基础知识、横纵解耦/联合的决策规划框架及常用的控制算法(PID、LQR、MPC等等)。
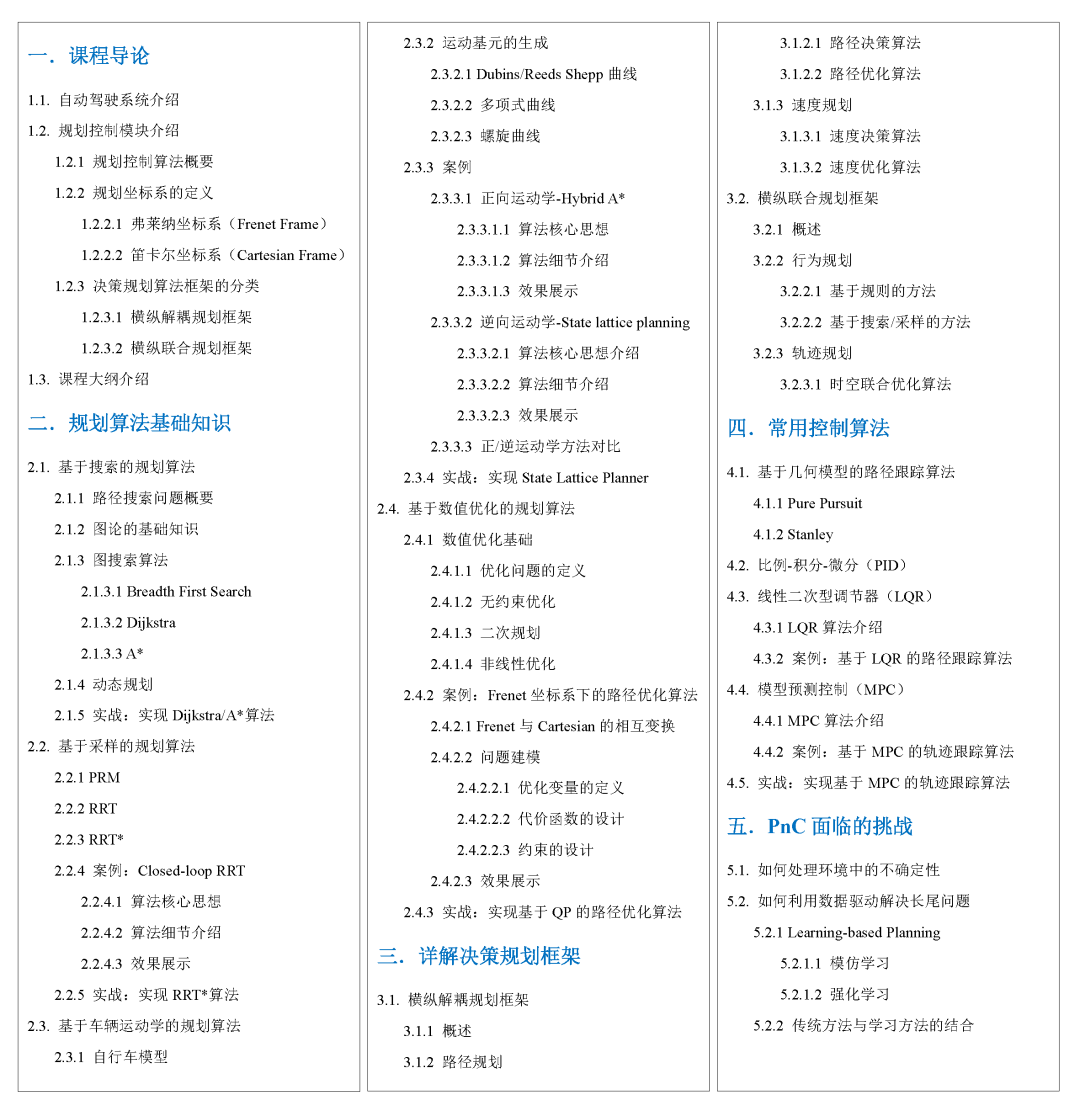
课程从最基础的规划控制模块概要、定义开始,进而到规划算法基础知识的讲解,涉及基于搜索/采样/车辆运动学/数值优化的相关规划算法,再到决策规划框架的讲解(横纵解耦、横纵联合)、最后讲解了常用的几种控制算法(PID、LQR、MPC)并探讨了PnC面临的挑战,实战涉及Dijkstra、A*、RRT*、State Lattice Planner、QP路径优化和基于MPC的轨迹跟踪算法。
大家先看一下本期课程的大纲,满满的干货,真正做到帮助0基础的同学高效学习,快速掌握每一个知识点
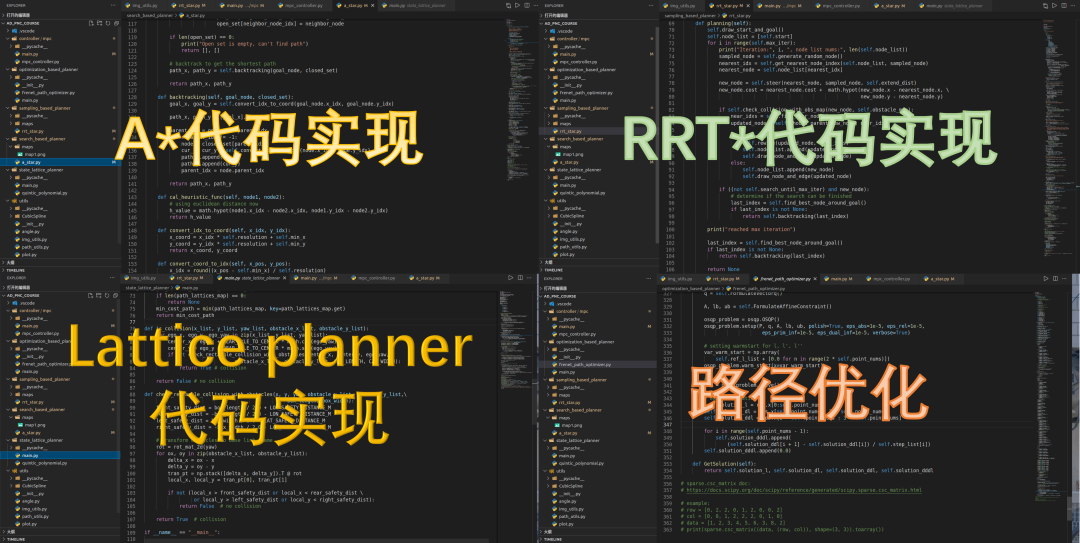
项目实战和理论结合,实战课程的课后配套实战代码,随学随练、快速掌握。
共5大实战项目
课程包括完善的【老师教学】+【助教答疑】服务,确保每一位小伙伴都能愉快的学习知识。
实战一:实现A*、Dijkstra,校招面试必备;
实战二:实现RRT*算法;
实战三:实现State Lattice Planner;
实战四:实现基于QP的路径优化算法;
实战五:实现基于MPC的轨迹跟踪算法!
课件代码一应俱全
细致的讲解,不光有理论,代码及实践也一定要讲透彻!
通过全套的视频讲解,帮你在脑海中搭建模型的基本框架,让你彻底搞懂每一个知识点,从而提高你写代码的速度。

讲师介绍
宁远,自动驾驶之心前沿技术研究团队成员,深耕自动驾驶算法领域多年,现任业内头部自动驾驶公司团队资深算法工程师,在自动驾驶规划控制算法研究和工程落地方面有着丰富的经验。
课程收获
对规划算法理论基础知识有深入的理解,在代码实现上有较大提升;
对决策规划框架有深入的理解,掌握常见的横纵解耦和横纵联合规划框架;
掌握常用的控制算法(PID、LQR、MPC);
学完本课程能够达到1年左右的自动驾驶规控工程师水平;
能够结识许多行业从业人员与学习合作伙伴!
适合人群
车辆工程、自动化、汽车电子、计算机科学、软件工程、运动控制等相关专业研究方向的本科/硕士/博士;
自动驾驶规划与控制相关算法工程人员;
想要转入自动驾驶规控算法的小伙伴;
本课程需要具备的基础
具有一定的编程基础:C/C++或者Python;
一定的高等数学、线性代数和矩阵论基础;
开课时间与学习方式
2023年7月18日正式开始学习之路,历经两个月,离线视频授课。主讲老师在微信学习群内答疑,对课程中的算法、代码、环境配置等问题一一解惑!
课程咨询
早鸟不等人!扫码领取优惠加入学习!

扫码添加助理咨询课程!
(微信:AIDriver004)


