
热门标签
热门文章
- 1idea修改git地址与svn地址_idea 更改svn路径
- 2为基层减负,云盒子助力社区单位内外部文件高效地收集!
- 3Elasticsearch7.6(windows版单机版)api使用及JD搜索高亮显示_windows elasticsearch 单机版
- 4Redis中集合set数据类型(增加(添加元素)、获取(获取所有元素)、删除(删除指定元素))_redis删除set中的某一个值
- 5使用DWR更新Table_dwrthb
- 6python获取usb扫描枪数据_Python - Re: 如何用Python接收扫描枪传来的信息数据
- 7iMazing3功能强大且易于使用的iPhone和iPad管理工具,可以作为iTunes的替代品进行数据备份和其他设备管理任务
- 8简单的Image Picker:使用Jetpack Compose无需权限申请_image-picker需要权限吗
- 9HTTP报文格式详解
- 10hbase shell操作总结
当前位置: article > 正文
龙格库塔求解车辆振动模型_多自由度振动系统的龙格库塔法
作者:IT小白 | 2024-05-07 18:15:39
赞
踩
多自由度振动系统的龙格库塔法
1、内容简介
略
2、内容说明
略
3、仿真分析
clear
clc
close all
t0=0; % 开始时间
t1=10;%结束时间
h=0.01;%步长
u = 1; %输入幅值
x0=[0;u;0;1;0;1;0;1]; %初始状态
T=t0:h:t1; %时间序列
X=zeros(length(x0),length(T)); %
F = u*sin(T); %激励源
Fdt = u*cos(T); %激励源速度
Fdtdt = -u*sin(T);%激励加速度
X(:,1)=x0;
m1 = 50;% 轮胎重量
m2 = 1000;% 车体重量
m3 = 80;% 人体重量
k1 = 1800;c1 = 200; %轮胎刚度阻尼
k2 = 14000;c2 = 5000; %悬挂刚度阻尼
k3 = 1000; c3 = 500; %座椅刚度和阻尼
for j=1:length(T)-1
X(:,j+1)=RK45(T(j),X(:,j),@(t,x)f(t,x),h); %调用龙格库塔函数
end
%输出信息
figure
plot(T,F);
title Z1位移
figure
plot(T,Fdt);
title Z1速度
figure
plot(T,Fdtdt);
title Z1加速度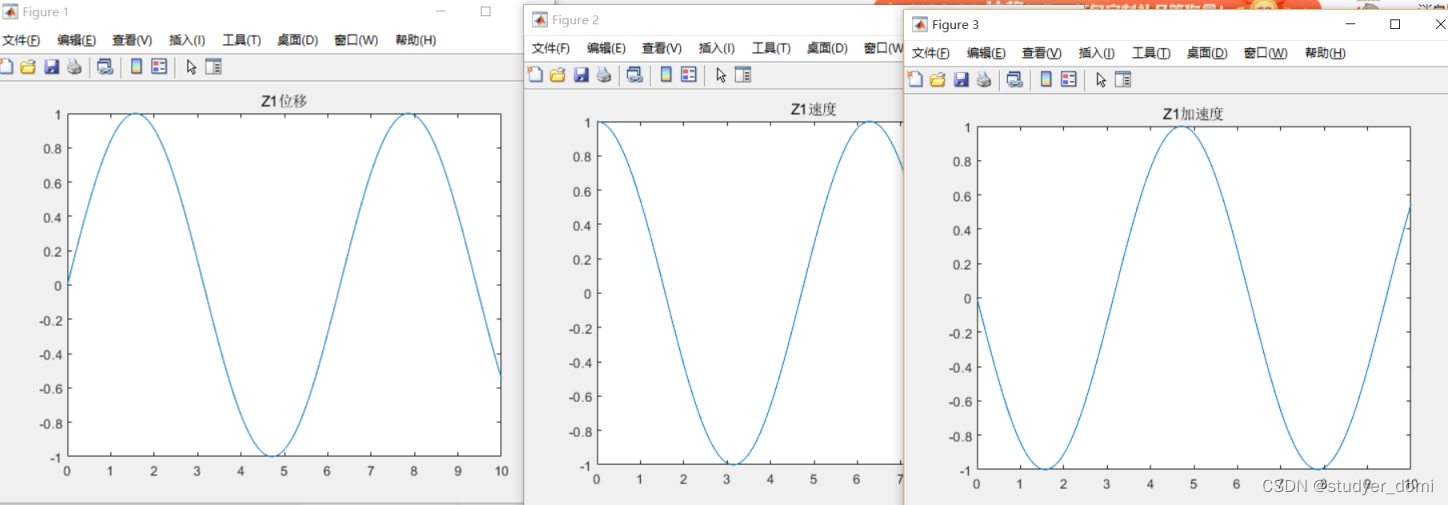
4、参考论文
略
企q鹅q号:1762016542
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

