
- 1mysql 查询重复数据_mysql查询重复数据
- 2Redis高级面试题汇总
- 3设计模式-迭代器模式
- 4如何快速进阶自动化测试?听听这3位BAT大厂测试工程师的切身感想...._大厂如何做自动化测试
- 5mysql的面试题及答案,一位大龄程序员所经历的面试的历炼和思考,java面试大全笔记
- 6nginx配置备忘录_upstream mgr{}
- 7Eureka注册中心快速入门_eureka http接口
- 8如何设置vscode编辑器代码格式化(settings.json)_vscode代码格式化setting配置
- 9微信小程序封装wx.request接口(两种方式)_wx.request({
- 10VMware虚拟机安装(非常详细)从零基础入门到精通,看完这一篇就够了_vmware虚拟机安装教程(1)
fast-livo运行及报错解决办法_query livox lidar fw type failed
赞
踩
运行:
source ~/code/diver/ws_livox/devel/setup.bash
source ./devel/setup.bash
运行数据集:
roslaunch fast_livo mapping_avia.launch
roslaunch fast_livo mapping_avia_ntu.launch
rosbag play YOUR_DOWNLOADED.bag
修改参数:cam_d0到cam_d3是相机畸变参数

报错:
1、对'Sophus::SE3::xxx'未定义的引用
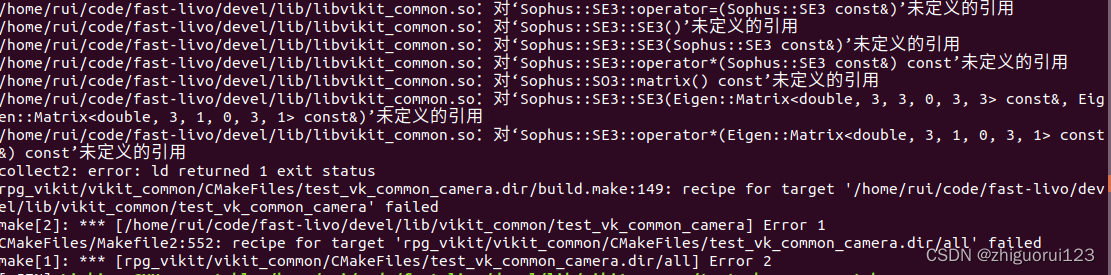
解决办法:在rpg_vikit/vikit_common的CmakeLists.txt里添加SET(Sophus_LIBRARIES libSophus.so)
2、error:缺少point6D.h这个文件
解决办法:将livox驱动的/setup.bash路径设置到全局环境中,即
终端输入
sudo gedit ~/.bashrc在文章最后面加上livox_ros_driver_ws的setup.bash的位置(我把它放code里了),即
livox_ros_driver_ws的setup.bash3、fatal error: fast_livo/States.h: 没有那个文件或目录
解决办法:注释掉
4、error: invalid conversion from ‘const char*’ to ‘int’ [-fpermissive]
omp_set_num_threads(MP_PROC_NUM);
解决办法:好像是将它换成数字(我好像是写的2)就行了
5、roslaunch出错:republish-4] process has died
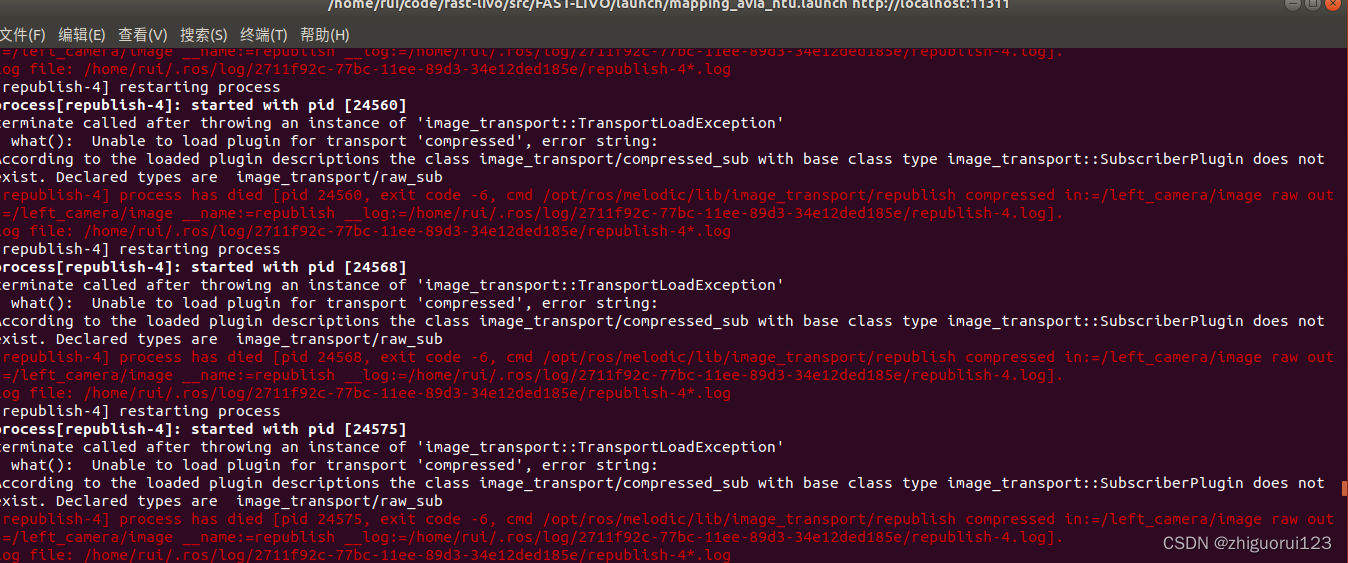
解决办法:sudo apt install ros-melodic-image-transport-plugins
6、roslaunch fast_livo mapping_avia.launch时报错:
laserMapping-1] process has died

解决办法:同5

