
- 1JS删除对象中的某一属性(delete)_删除对象中的某一项
- 2毕业设计:基于深度学习的图像去噪算法 人工智能_cnn去噪
- 3图书管理系统数据库设计_图书管理系统数据库表结构设计表
- 4SwiftUI 6.0(iOS 18)新容器视图修改器漫谈_swift 6 ios18
- 5SqlServer设置快照隔离_sqlserver设置快照隔离慢
- 6怎样在php中退出登录,php如何实现退出登录功能
- 7SQL update多表关联更新_sql update as 多表关联修改
- 8Zed+AD9361项目独立移植到windows中
- 9Gitte的使用(Windows/Linux)_widows 使用gitte
- 10kotlin 和 java 的区别_kotlin和java的区别
使用MATLAB和SIMULINK实现n阶机械臂单、多智能体控制:强化学习方法与三维仿真_matlab 机械臂强化学习
赞
踩
MATLAB代码:n阶机械臂单、多智能体控制
关键词:n阶机械臂单 多智能体 单智能体
参考文档:
1.《Proximal Policy Optimization Algorithms》
2.《Asynchronous Methods for Deep Reinforcement Learning》
3.《High-Dimensional Continuous Control Using Generalized Advantage Estimation》
仿真平台:MATLAB、SIMULINK
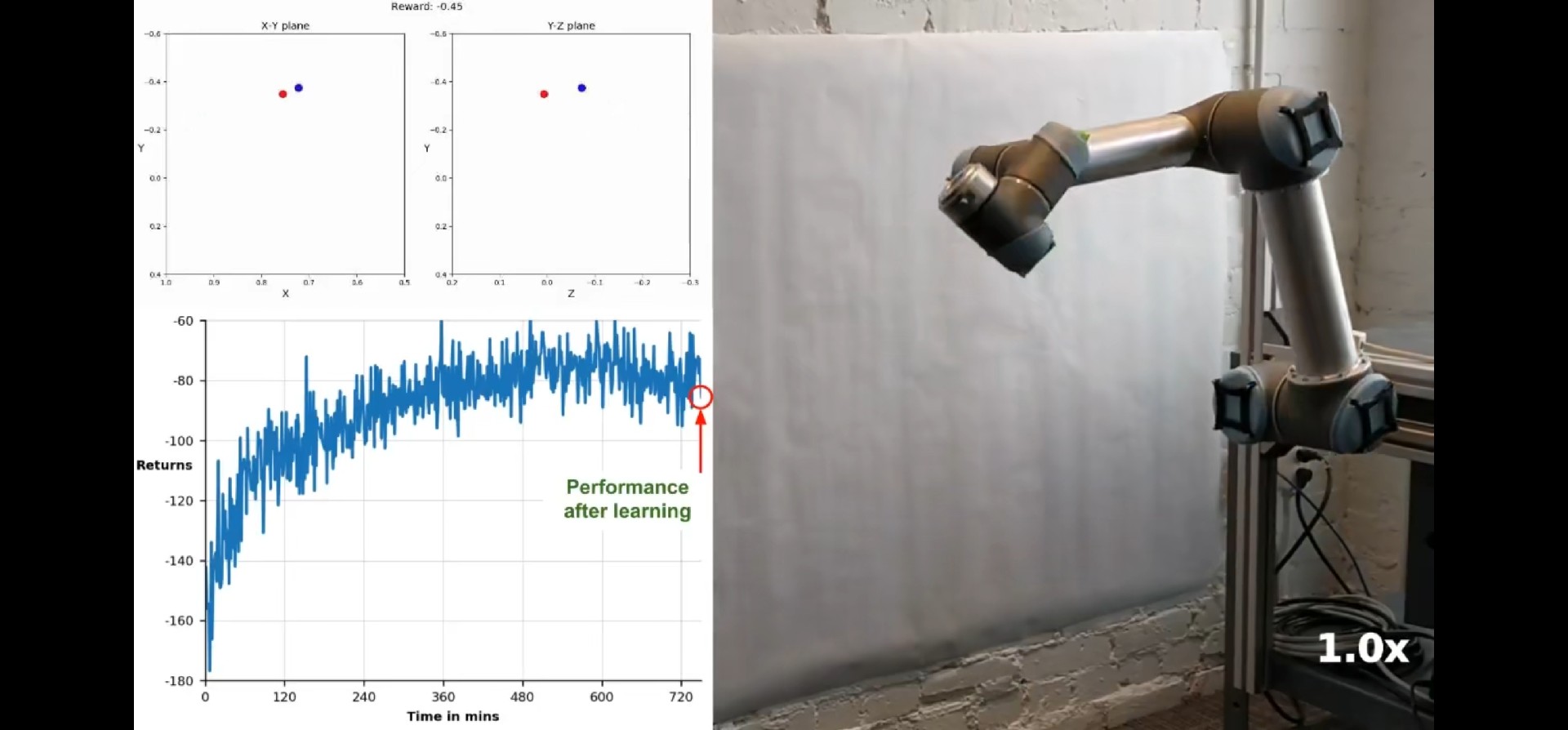
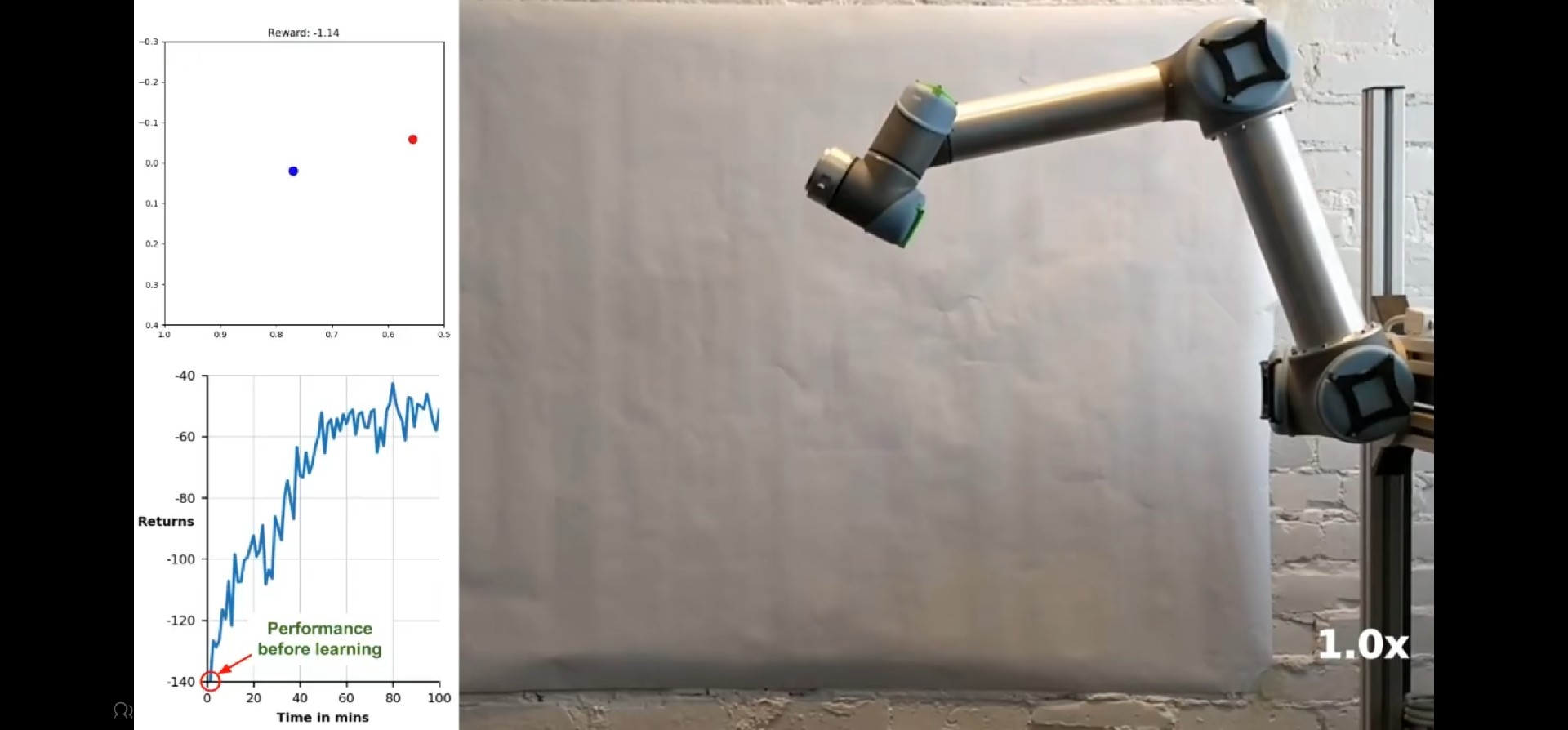
主要内容:采用MATLAB模拟机械臂并使用强化学习控制机械臂到达目标点。
现成代码是二维的,需要三维需定制。
ID:131800694292874318
电气代码小铺
标题:MATLAB模拟n阶机械臂单、多智能体控制与定制化
摘要:
本文主要介绍了如何使用MATLAB模拟n阶机械臂,并通过强化学习算法控制机械臂达到目标点的方法。当前市场上的现成代码主要针对二维机械臂,本文将着重讨论如何将其定制化为适用于三维机械臂的模拟过程。
-
引言
随着人工智能和机器学习的快速发展,强化学习成为了控制机械臂的重要方法之一。本文基于MATLAB环境,利用其强大的仿真平台与编程功能,介绍了n阶机械臂单、多智能体控制的方法,并提供了针对三维机械臂的定制化解决方案。 -
研究背景
近年来,深度强化学习算法在机械臂控制中取得了显著的成果。《Proximal Policy Optimization Algorithms》、《Asynchronous Methods for Deep Reinforcement Learning》和《High-Dimensional Continuous Control Using Generalized Advantage Estimation》等文献提供了强化学习算法的重要理论基础。 -
仿真平台与工具
本文采用MATLAB与SIMULINK作为仿真平台与工具,其强大的仿真功能和便捷的编程环境赋予了我们模拟机械臂和进行强化学习控制的能力。 -
机械臂模拟与控制方法
4.1 单智能体控制
本文首先介绍了单智能体控制的方案。通过定义适当的状态空间、动作空间、奖励函数和学习算法,我们能够实现机械臂单智能体控制的目标。
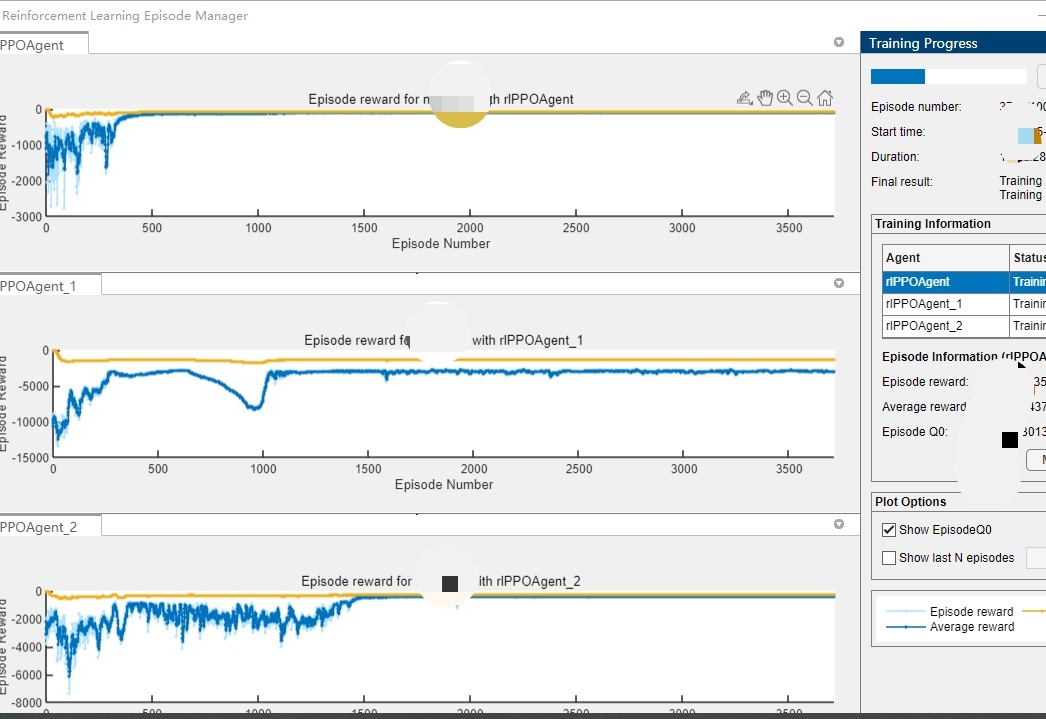
4.2 多智能体控制
在实际应用中,往往需要同时控制多个机械臂。针对多智能体控制问题,本文利用分布式学习算法,实现了多个机械臂的协同控制与目标达成。
-
三维机械臂的定制化
由于现成代码主要针对二维机械臂,本文进一步讨论了如何将其定制化为适用于三维机械臂的模拟过程。通过对代码进行修改与扩展,我们能够将模拟环境与机械臂的运动空间拓展至三维。 -
实验与结果
本文通过实验验证了所提方法的有效性。我们模拟了n阶机械臂在不同场景下的控制过程,并对比了单智能体控制与多智能体控制的性能差异。实验结果表明,所提出的方法能够有效地控制机械臂到达目标点。 -
结论与展望
本文通过MATLAB模拟n阶机械臂,并利用强化学习算法控制机械臂达到目标点的方法进行了研究。通过对现成代码的定制化,我们能够拓展其适用范围至三维机械臂。未来,我们将进一步完善算法,并尝试将其应用于更复杂的机械臂控制问题中。
关键词:n阶机械臂单、多智能体控制、定制化、仿真平台、MATLAB、SIMULINK
【相关代码 程序地址】: http://nodep.cn/694292874318.html

