
- 1前端开发---jQuery 效果_jq项目本地跑
- 22024年Python最全python面试题,2024年最新字节跳动面试流程查询_6个数据源的情况下,最多需要建立几个wrapper值
- 3Oracle merge into 详解(有则更新,无则插入)_源表数据写入目标表,源表有数据写,没有数据不写
- 4java 业务流程控制 activiti_java工作流引擎开发activiti
- 5Unity到底有无collider可视化,方便调试子弹,ACT,做Demo等
- 6【GitHub项目推荐--9个AI增强开发效率的VSCode扩展插件】【转载】_vscode github 插件
- 7sort 排序_sort(a, a + (n + n - m));
- 8expdp导出指定表_Oracle impdp/expdp基础
- 9win10环境下基于OpenVINO部署yolov5模型_yolov5 xml bin
- 10全站最全NLP中英文停用词表(包含标点符号,可直接复制)
YOLOV8-NCNN_yolov8 ncnn
赞
踩
最近对yolov8接触的蛮多。趁此,今天用ncnn对u版的yolov8n进行部署。
1. 模型准备
模型可自行在官方u版yolov8仓下载。我用的是yolov8n模型。
2. 熟悉后处理,pt2onnx

看父类
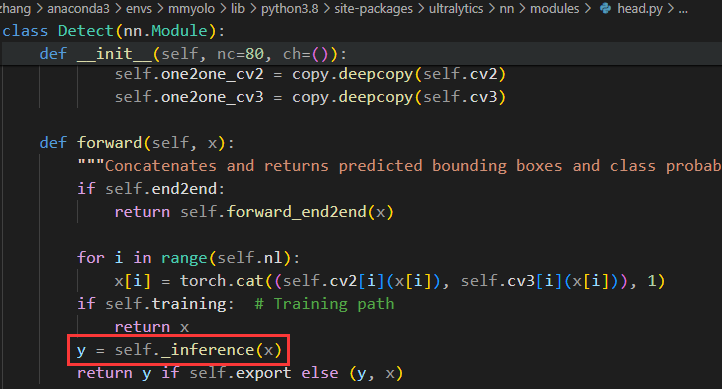
找推理
当前部署的是检测模型,找到相关检测部分的代码,看检测头前向过程。
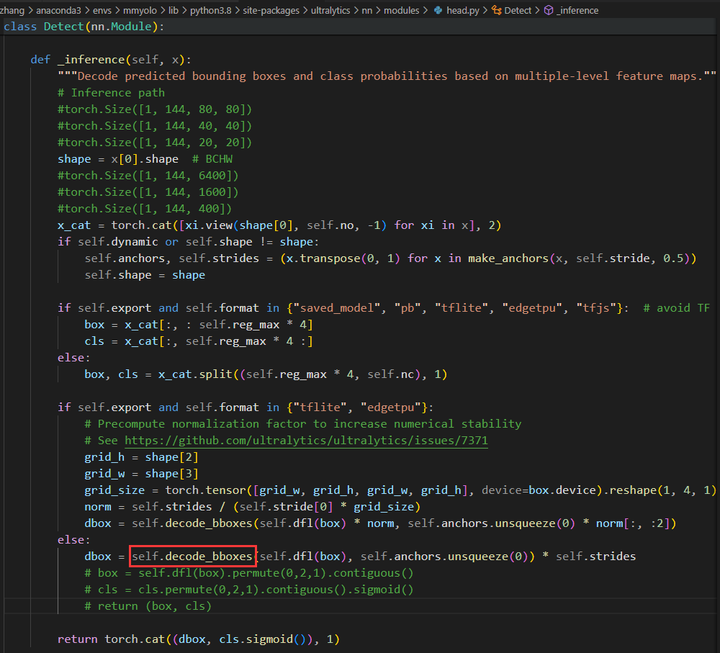
推理部分

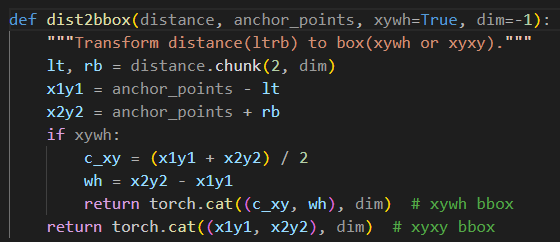
decode
decode
不了解模型输出,可以先自己打印出来看,熟悉每个一个维度所表示的对象。拿传入的x举例,[1,144,80,80]分别表示: 1 : batch, 144 : nc (80) + reg (16*4), 80 : num_grid_w, 80 : num_grid_h. 可以看到,最终输出的dbox是经过decode的,直接把decode的代码在c++重写一下即可(一般情况是ncnn转换不支持的算子自己才在c++重写)。这里的chunk算子我没有尝试用ncnn转换,或许可以,大家可以自己试一试。支持也可以自己写,可以加深对这一部分的理解,或许也可以提速?

导出代码重写
最后导出onnx模型的时候,重写一下这一部分的代码就可以了。我这儿是将box和cls输出分开输出,三个特征层的输出已经concat,导出的onnx如下:
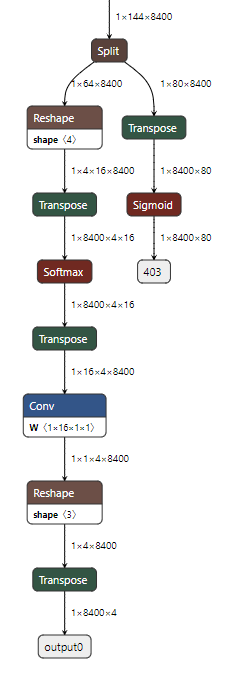
onnx可视化
3. 代码重写
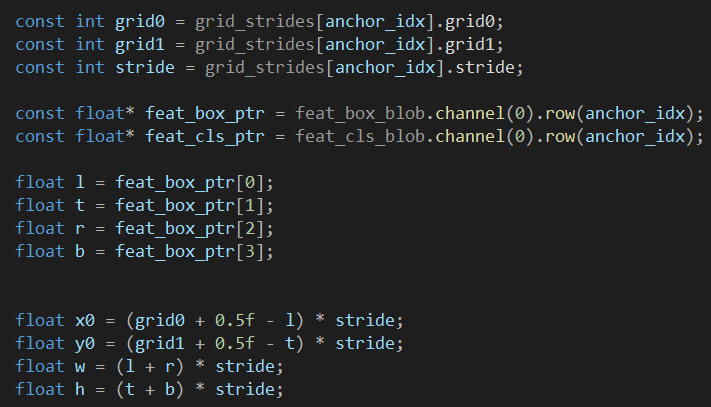
cpp
python
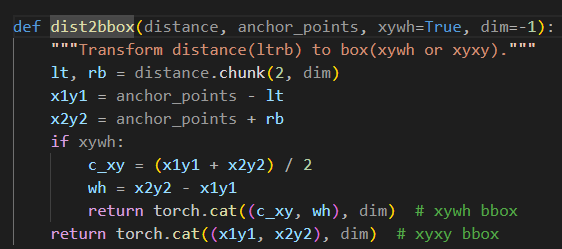
anchor-free,预测的中心点和四个边界的距离,最后用每个特征层的stride映射回去就可以了。
4. 遇到的问题
先放一张错误的检测结果
错例
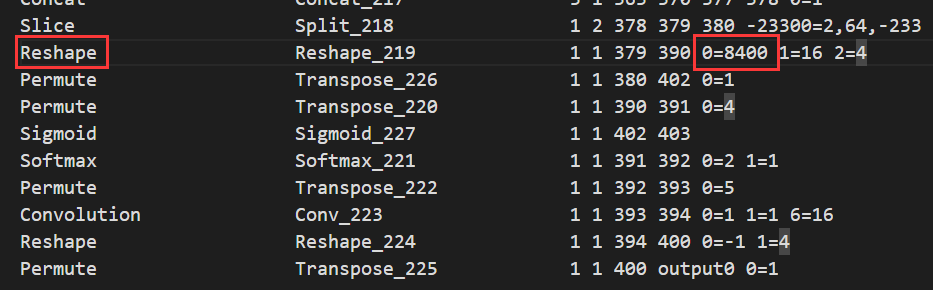
最后排查,是param里有两个reshape的参数0没有改成-1,如下
问题
导出的时候,图片大小是640×640,最后输出的三层的网格数量为8400,现在我们推理的图片的大小在resize的时候,不一定是640×640,输出的数量是不一样的,需要改成0=-1,自适应输出。这儿我们的倒数第二个reshape参数不对,应该是影响到划分网格的坐标了,两张图大小不匹配,导致最后框的大小有问题。如若是最后一个reshape有问题,就会导致满屏的输出。或许我的分析有问题,欢迎大家交流。
5. 总结
用ncnn部署模型,主要还是前处理和后处理。后处理的代码灵活多变,每个人的导出方式不一样,写的代码也不一样。下一步准备对transformer的模型进行部署尝试,顺带熟悉一下transformer结构。
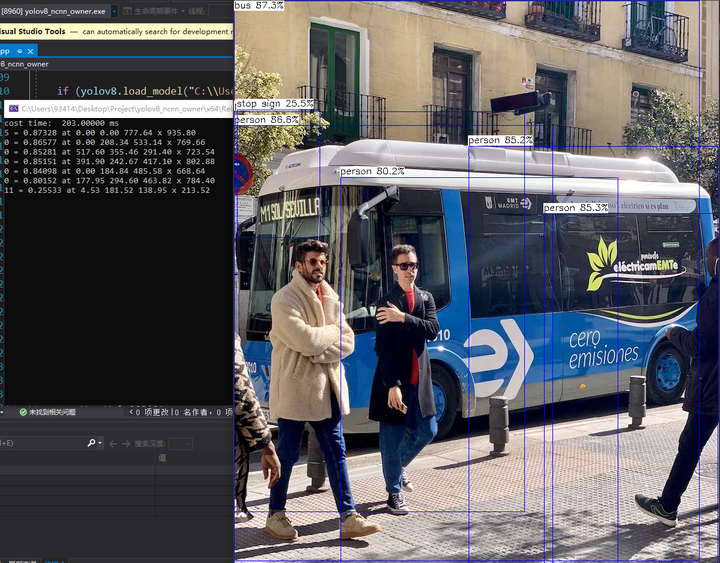
最后方上检测结果和代码:
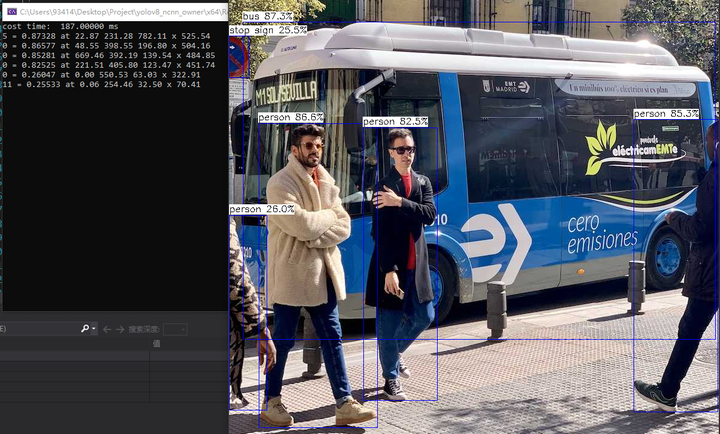
检测结果
YOLOV8-NCNN![]() https://github.com/marvellee1/YOLOV8-NCNN
https://github.com/marvellee1/YOLOV8-NCNN
欢迎交流~

