
热门标签
热门文章
- 1llama2.c|纯C语言推理开源语言模型Baby LLaMA
- 2oracle12c到19c adg搭建(五)dg搭建后进行切换19c进行数据字典升级_oracle12升级到19
- 3使用 OpenAI Whisper v2 模型进行中英文混合语音识别
- 4MySQL 基于 GTID 主从复制_mysql搭建基于gtid的主从复制
- 5Android Studio配置jre和Gradle配置jdk_android please, use jdk instead of jre for gradle
- 6Git在日常项目中的实用技巧
- 7Java代码审计&FastJson反序列化&利用链跟踪&动态调试&autoType绕过_第94天:代码审计-java项目&反序列化&shiro&fastjson&原生态&框架&利用链
- 8ORACLE 面试_oracle面试
- 9【linux】日志和journalctl 管理查看日志_journalctl -xe
- 10使用YUM 安装 docker_yum docker
当前位置: article > 正文
YOLOv5 基于表型和姿态估计的番茄收获自主机器人_ahppebot
作者:Li_阴宅 | 2024-07-30 07:15:03
赞
踩
ahppebot
目录
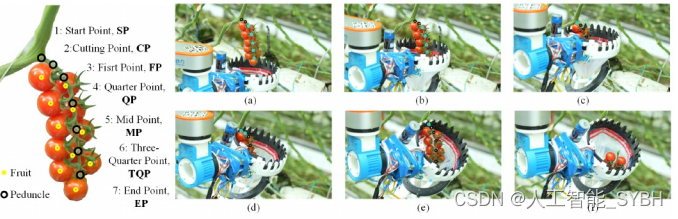
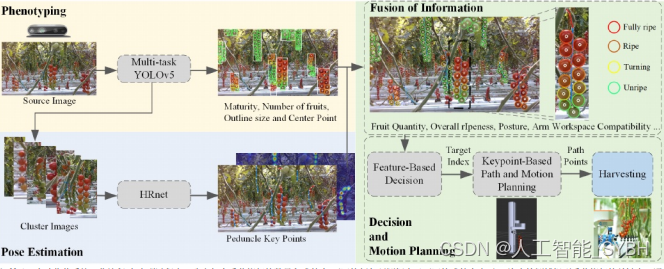
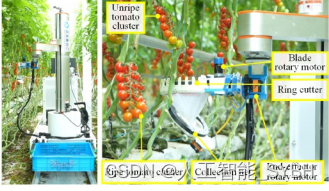
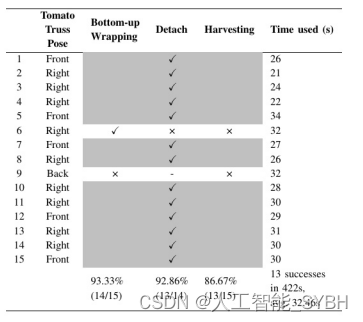
为了解决传统自动收获机器人固有的局限性,特别是 它们的次优成功率和作物受损的风险,我们设计了一种名为 AHPPEBot的新型机器人,它能够基于作物表型和姿态估计进 行自主收获。具体而言,在表型分析中,番茄桁架和单个果实 的检测、关联和成熟度估计是通过多任务YOLOv5模型和基于 检测的自适应DBScan聚类算法完成的。在姿态估计中,我们采 用深度学习模型来预测花梗上的7个语义关键点。这些关键点 有助于机器人的路径规划,最小化目标接触,并便于使用我们 专门的末端执行器进行收割。在商业温室中进行的自主番茄收 获实验中,我们提出的机器人实现了86.67%的收获成功率,平 均成功收获时间为32.46 s,展示了其连续和强大的收获能力。 这一结果强调了收获机器人在弥合农业劳动力差距方面
推荐阅读
相关标签

