- 1【STM32】配置中断-实例&思路_按键中断的设置流程
- 2Linux - 进程的概念、状态、僵尸进程、孤儿进程及进程优先级
- 3Python实现对MsSqlServer数据库定时自动备份、压缩、上传到minio_python如何自动备份数据库bak文件
- 4DGCNN (Dynamic Graph CNN for Learning on Point Clouds,动态图卷积网络)
- 5SpringBoot之拦截器的配置_拦截器只拦截 restcontroller
- 6机器学习训练算法十二(模型训练算法-Python实验)_python 算法练习
- 7昇思基础课程打卡(SPONGE课前学习)1.快速入门
- 8如何外网访问登录员工管理系统平台_hr 网络安全 应用
- 9【并发编程篇】读锁readLock()和写锁writeLock()
- 10OpenHarmony开发记录-Websocket封装_openharmony websocket
[轨迹规划实操] 横向优化算法+纵向DP算法的python复现(1)_轨迹规划 横向规划
赞
踩
前言
本文采用基于优化的横向规划方法,具体流程如下:
- 根据障碍物信息,确定横向轨迹的边界条件;
- 根据车辆运动学设置约束条件;
- 定义目标函数;
- 用 ipopt 求解优化问题。
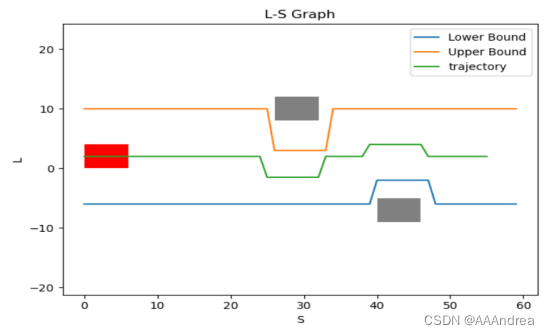
本文采用动态规划(DP)进行纵向规划,具体流程如下:
- 处理障碍物信息;
- 计算出障碍物在ST图上占据的空间;
- 计算自车的纵向边界信息,生成图节点;
- 分别计算层节点的cost值;
- 从末层cost最小值的节点开始根据"parent"值进行回溯;
- 通过回溯得到的每一个时刻的s(路程),计算出v(速度)和a(加速度)。
一、横向优化算法
1. 横向轨迹的边界计算(基于SL图)
代码模块 LateralTrajectoryCalculator.calcu_choosed_bound()
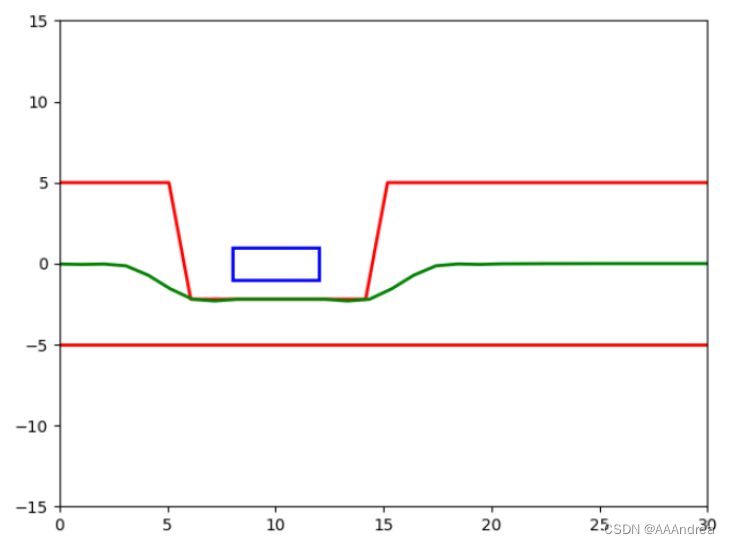
简单地说,边界的生成主要与道路边界和障碍物有关:(见图1中的红线部分)
需要满足以下条件:
① 上下边界不超过道路边界
② 如果出现障碍物在参考线上面部分,则上边界修改为障碍物边界;
同理,如果障碍物出现在参考线下面部分,则下边界修改为障碍物边界;
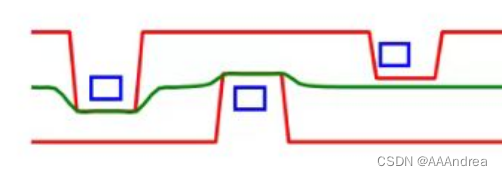
上述定义方式只适合在极少障碍物的情况下,如果出现连续障碍物或者障碍物出现在参考线上,这种简单的设置方式就不是非常合理了。
因此本文在设置障碍物边界之前,定义一种障碍物边界决策方案。
通过生成采样点,计算采样点的势能值,根据势能值小的采样点的分布(以参考线为中心线)判断绕行障碍物的方向,从而缩小横向约束边界。
# 生成采样点 Sample = GenSampling(self.currentlanewidth,self.leftlanewidth,self.rightlanewidth, self.leftlanenum, self.rightlanenum, self.num_samples, self.backdistance, self.frontdistance, self.reference_list) # 随机采样 #sampled_points = GenSampling.random_sampling(self) # 均匀采样 # sampled_points = Sample.uniform_sampling() #极简采样 sampled_points = Sample.quick_sampling() print("Sample Finished") print("Time taken for sampling: {:.4f} seconds".format(time.time() - start_time)) start_time = time.time() # 记录开始时间 # 计算势能值 Potential = CalPotential(self.ds, self.oblist, self.obstacle_length, self.obstacle_width,self.currentlanewidth,self.leftlanewidth,self.rightlanewidth, self.leftlanenum, self.rightlanenum,self.vehicle_width, sampled_points, self.vehicle_length,self.vehicle_speed,self.obstacle_speed,self.reference_list,self.obstacle_heading,self.vehicle_heading) points_potential = Potential.sum_potential() print(points_potential) print("Calculate Potential Finished") # 每一个s值 保留potential最小的5个点 根据点的分布情况 确定行驶区域 choose_points,x_keep = Potential.process_coordinates_and_potential(sampled_points,points_potential) print(choose_points)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
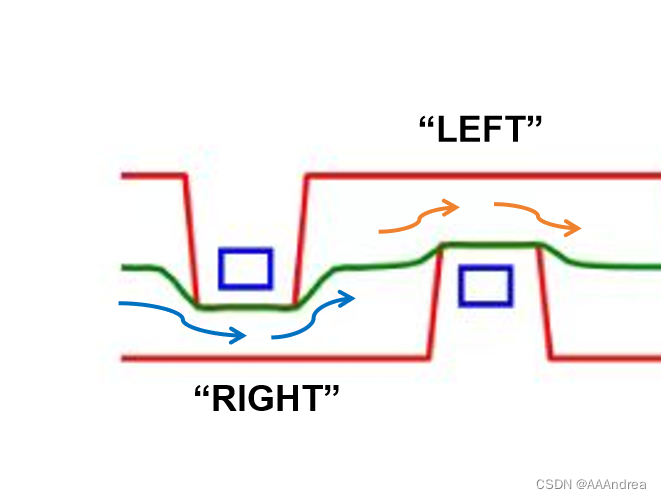
在进行完障碍物边界决策后,每一个障碍物都会对应一个’TAG’.
如果出现 TAG==‘left’ ,就意味着对于这一个障碍物,自车采取从左边进行绕行,也就是意味着要修改下边界条件。
同理,如果出现 TAG ==‘right’,就意味着自车采取从右边绕行该障碍物的方式,需要修改上边界条件。
如果出现势能值小的采样点在参考线左右分布相同,本文结合国内的驾驶习惯,从左边进行超车,因而修改下边界条件。
2.根据车辆运动学设置约束条件
如果不设置车辆运动学约束就会出现轨迹曲率突变等情况。
因此在优化求解之前,加入车辆运动学的约束条件:
for i in range(self.length - 1): # 车辆运动学
opti.subject_to(l[i+1] - l[i] - dl[i] * self.ds - 1/3 * ddl[i] * self.ds**2 -
1/6 * ddl[i+1] * self.ds **2 == 0)
opti.subject_to(dl[i+1] - dl[i] - 1/2 * ddl[i] * self.ds - 1/2 * ddl[i+1] * self.ds == 0)
opti.subject_to(ddl[i+1] - ddl[i] <= 0.5 * self.ds) # 正常 0.4-1.0
opti.subject_to(ddl[i+1] - ddl[i] >= -0.5 * self.ds)
- 1
- 2
- 3
- 4
- 5
- 6
3.定义目标函数
本文一开始选择采用横向偏移量最小作为目标函数。
进行测试时,发现自车在避障障碍物的时候先会往左拐,再往右避障障碍物。
经过分析,可能是由于目标函数的设置只考虑了横向偏移量,自车会通过先往左再往右这种方式来减小整体偏移量,但这并不符合实际情况。
因此,本文在横向偏移量最小的前提下考虑了航向角的选取,需要接近参考线的航向。

在适当调整目标函数的权重后,就可以比较理想的横向轨迹了。