
- 1【东华大学oj】顺序栈ADT模板简单应用算法设计:回文判断_顺序栈adt模板简单应用算法设计:火车调度 时间限制: 1s 类别: ds:栈->栈定义及应
- 2怎么把b站的视频保存到本地_b站视频怎么下载到本地视频
- 3【Vue3-Element-Admin 动态路由】涉及到的配置_elementadmin vue3
- 4HBase 单机部署_hbase gui如何使用
- 5MYSQL 用户权限类型划分_mysql super
- 6ChatGPT及AI大模型学习笔记分享_chatgpt没有对应的ai模型
- 7golang struct 转 interface_Go语言(golang)新发布的1.13中的Error Wrapping深度分析
- 8接触式轮廓仪的自动标注数学建模_数学建模竞赛真题体验交流会圆满结束!!!...
- 9java 判断邮箱_java使用正则表达式判断邮箱格式是否正确的方法
- 1015个Kimichat官方提示词模版,教你快速写出爆款文案、小红书排版_kimi常用语模版
ROS2 概念以及通信方式
赞
踩
一、ros2的相关概念
ROS 2(Robot Operating System 2)是一个用于机器人开发的开源平台,它提供了一系列工具和库,用于构建机器人应用程序。相较于前身ROS(ROS 1),ROS 2在设计上考虑了更多的实时性、安全性和可靠性因素,因此适用于更广泛的应用场景和硬件平台。
以下是ROS 2的一些关键特点和概念:
-
分布式架构:ROS 2支持分布式架构,允许节点在多个物理机器上运行,通过网络进行通信。这种架构支持更复杂和大规模的机器人系统。
-
实时性:ROS 2引入了实时通信机制,如数据流控制(DDS),以支持严格的实时需求。这使得ROS 2能够在需要高实时性的应用中发挥作用,如自动驾驶、工业自动化等领域。
-
跨平台支持:ROS 2被设计为跨多种操作系统平台(如Linux、Windows、macOS等)和不同体系结构(如x86、ARM等)运行。
-
多语言支持:ROS 2提供了对多种编程语言的支持,包括C++、Python等,使得开发者可以根据自己的偏好和需求选择合适的编程语言进行开发。
-
通信协议:ROS 2使用快速数据分发(Fast DDS)作为默认的通信中间件,支持可靠和不可靠的数据传输,以及QoS(Quality of Service)配置,以满足不同应用场景的需求。
-
工具和库:ROS 2提供了丰富的工具和库,用于开发、调试和测试机器人应用程序,包括仿真工具(如Gazebo)、视觉库(如OpenCV)和导航库(如Navigation2)等。
-
社区支持:ROS 2拥有一个活跃的全球社区,提供了大量的文档、教程和开源项目,帮助开发者快速上手和解决问题。
二、ros如何通信?
1.Node(节点)
在ROS的世界里,最小的进程单元就是节点(node)。一个软件包里可以有多个可执行文件,可执行文件在运行之后就成了一个进程(process),这个进程在ROS中就叫做节点。 从程序角度来说,node就是一个可执行文件(通常为C++编译生成的可执行文件、Python脚本)被执行,加载到了内存之中;从功能角度来说,通常一个node负责者机器人的某一个单独的功能。由于机器人的功能模块非常复杂,我们往往不会把所有功能都集中到一个node上,而会采用分布式的方式,把鸡蛋放到不同的篮子里。例如有一个node来控制底盘轮子的运动,有一个node驱动摄像头获取图像,有一个node驱动激光雷达,有一个node根据传感器信息进行路径规划……这样做可以降低程序发生崩溃的可能性,试想一下如果把所有功能都写到一个程序中,模块间的通信、异常处理将会很麻烦。
2.master
由于机器人的元器件很多,功能庞大,因此实际运行时往往会运行众多的node,负责感知世界、控制运动、决策和计算等功能。那么如何合理的进行调配、管理这些node?这就要利用ROS提供给我们的节点管理器master, master在整个网络通信架构里相当于管理中心,管理着各个node。node首先在master处进行注册,之后master会将该node纳入整个ROS程序中。node之间的通信也是先由master进行“牵线”,才能两两的进行点对点通信。当ROS程序启动时,第一步首先启动master,由节点管理器处理依次启动node。
3.launch文件
机器人是一个系统工程,通常一个机器人运行操作时要开启很多个node,对于一个复杂的机器人的启动操作应该怎么做呢?当然,我们并不需要每个节点依次进行rosrun,ROS为我们提供了一个命令能一次性启动master和多个node。该命令是:
$ roslaunch pkg_name file_name.launch
roslaunch命令首先会自动进行检测系统的roscore有没有运行,也即是确认节点管理器是否在运行状态中,如果master没有启动,那么roslaunch就会首先启动master,然后再按照launch的规则执行。launch文件里已经配置好了启动的规则。 所以roslaunch就像是一个启动工具,能够一次性把多个节点按照我们预先的配置启动起来,减少我们在终端中一条条输入指令的麻烦。
4.lauch文件格式遵循xml
- <launch> <!--根标签-->
- <node> <!--需要启动的node及其参数-->
- <include> <!--包含其他launch-->
- <machine> <!--指定运行的机器-->
- <env-loader> <!--设置环境变量-->
- <param> <!--定义参数到参数服务器-->
- <rosparam> <!--启动yaml文件参数到参数服务器-->
- <arg> <!--定义变量-->
- <remap> <!--设定参数映射-->
- <group> <!--设定命名空间-->
- </launch> <!--根标签-->
5.topic
ROS的通信方式是ROS最为核心的概念,ROS系统的精髓就在于它提供的通信架构。ROS的通信方式有以下四种:
- Topic 主题
- Service 服务
- Parameter Service 参数服务器
- Actionlib 动作库
ROS中的通信方式中,topic是常用的一种。对于实时性、周期性的消息,使用topic来传输是最佳的选择。topic是一种点对点的单向通信方式,这里的“点”指的是node,也就是说node之间可以通过topic方式来传递信息。topic要经历下面几步的初始化过程:首先,publisher节点和subscriber节点都要到节点管理器进行注册,然后publisher会发布topic,subscriber在master的指挥下会订阅该topic,从而建立起sub-pub之间的通信。注意整个过程是单向的。其结构示意图如下:
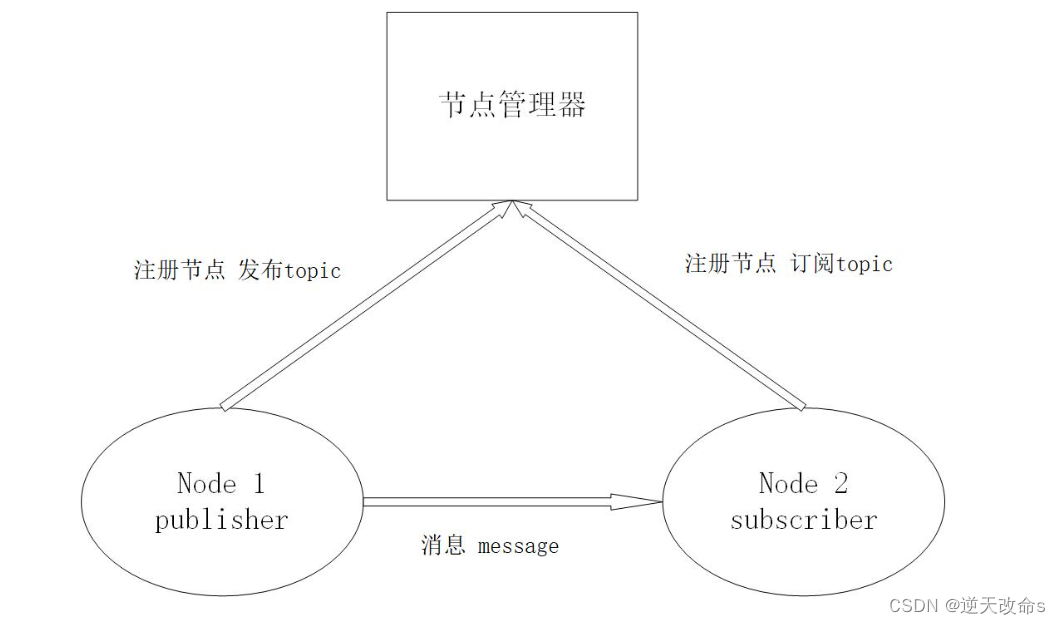
Subscriber接收消息会进行处理,一般这个过程叫做回调(Callback)。所谓回调就是提前定义好了一个处理函数(写在代码中),当有消息来就会触发这个处理函数,函数会对消息进行处理。
上图就是ROS的topic通信方式的流程示意图。topic通信属于一种异步的通信方式。下面我们通过一个示例来了解下如何使用topic通信。
6.通信示例
参考下图,我们以摄像头画面的发布、处理、显示为例讲讲topic通信的流程。在机器人上的摄像头拍摄程序是一个node(圆圈表示,我们记作node1),当node1运行启动之后,它作为一个Publisher就开始发布topic。比如它发布了一个topic(方框表示),叫做/camera_rgb,是rgb颜色信息,即采集到的彩色图像。同时,node2假如是图像处理程序,它订阅了/camera_rgb这个topic,经过节点管理器的介绍,它就能建立和摄像头节点(node1)的连接。
那么怎么样来理解“异步”这个概念呢?在node1每发布一次消息之后,就会继续执行下一个动作,至于消息是什么状态、被怎样处理,它不需要了解;而对于node2图像处理程序,它只管接收和处理/camera_rgb上的消息,至于是谁发来的,它不会关心。所以node1、node2两者都是各司其责,不存在协同工作,我们称这样的通信方式是异步的。
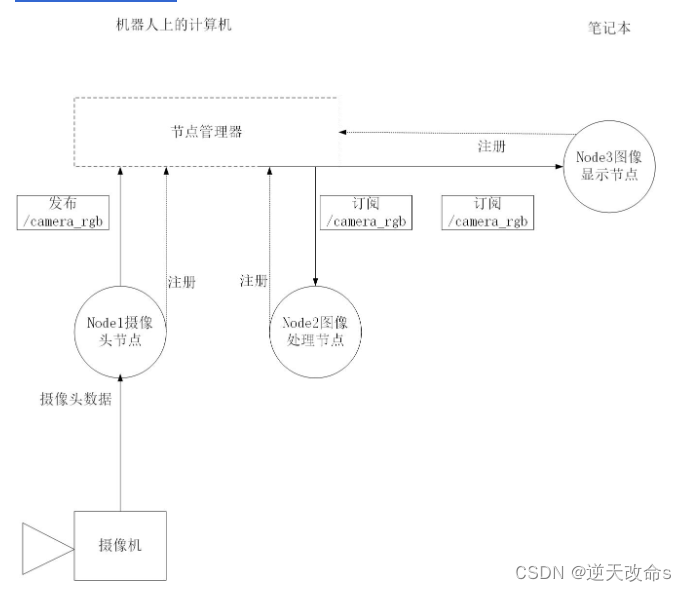
ROS是一种分布式的架构,一个topic可以被多个节点同时发布,也可以同时被多个节点接收。比如在这个场景中用户可以再加入一个图像显示的节点,我们在想看看摄像头节点的画面,则可以用自己的笔记本连接到机器人上的节点管理器,然后在自己的电脑上启动图像显示节点。
这就体现了分布式系统通信的好处:扩展性好、软件复用率高。
总结三点:
- topic通信方式是异步的,发送时调用publish()方法,发送完成立即返回,不用等待反馈。
- subscriber通过回调函数的方式来处理消息。
- topic可以同时有多个subscribers,也可以同时有多个publishers。ROS中这样的例子有:/rosout、/tf等等。
三、Message
topic有很严格的格式要求,比如上节的摄像头进程中的rgb图像topic,它就必然要遵循ROS中定义好的rgb图像格式。这种数据格式就是Message。Message按照定义解释就是topic内容的数据类型,也称之为topic的格式标准。这里和我们平常用到的Massage直观概念有所不同,这里的Message不单单指一条发布或者订阅的消息,也指定为topic的格式标准。
1.数据类型
- std_msg/Header header
- uint32 seq
- time stamp
- string frame_id
- uint32 height
- uint32 width
- string encoding
- uint8 is_bigendian
- uint32 step
- uint8[] data
观察上面msg的定义,是不是很类似C语言中的结构体呢?通过具体的定义图像的宽度,高度等等来规范图像的格式。所以这就解释了Message不仅仅是我们平时理解的一条一条的消息,而且更是ROS中topic的格式规范。或者可以理解msg是一个“类”,那么我们每次发布的内容可以理解为“对象”,这么对比来理解可能更加容易。 我们实际通常不会把Message概念分的那么清,通常说Message既指的是类,也是指它的对象。而msg文件则相当于类的定义了。
2.常见message
主要介绍常见的message类型,包括std_msgs, sensor_msgs, nav_msgs, geometry_msgs等
Vector3.msg
- #文件位置:geometry_msgs/Vector3.msg
-
- float64 x
- float64 y
- float64 z
Accel.msg
- #定义加速度项,包括线性加速度和角加速度
- #文件位置:geometry_msgs/Accel.msg
- Vector3 linear
- Vector3 angular
Header.msg
- #定义数据的参考时间和参考坐标
- #文件位置:std_msgs/Header.msg
- uint32 seq #数据ID
- time stamp #数据时间戳
- string frame_id #数据的参考坐标系
Echos.msg
- #定义超声传感器
- #文件位置:自定义msg文件
- Header header
- uint16 front_left
- uint16 front_center
- uint16 front_right
- uint16 rear_left
- uint16 rear_center
- uint16 rear_right
Quaternion.msg
- #消息代表空间中旋转的四元数
- #文件位置:geometry_msgs/Quaternion.msg
-
- float64 x
- float64 y
- float64 z
- float64 w
Imu.msg
- #消息包含了从惯性原件中得到的数据,加速度为m/^2,角速度为rad/s
- #如果所有的测量协方差已知,则需要全部填充进来如果只知道方差,则
- #只填充协方差矩阵的对角数据即可
- #位置:sensor_msgs/Imu.msg
-
- Header header
- Quaternion orientation
- float64[9] orientation_covariance
- Vector3 angular_velocity
- float64[9] angular_velocity_covariance
- Vector3 linear_acceleration
- float64[] linear_acceleration_covariance
LaserScan.msg
- #平面内的激光测距扫描数据,注意此消息类型仅仅适配激光测距设备
- #如果有其他类型的测距设备(如声呐),需要另外创建不同类型的消息
- #位置:sensor_msgs/LaserScan.msg
-
- Header header #时间戳为接收到第一束激光的时间
- float32 angle_min #扫描开始时的角度(单位为rad)
- float32 angle_max #扫描结束时的角度(单位为rad)
- float32 angle_increment #两次测量之间的角度增量(单位为rad)
- float32 time_increment #两次测量之间的时间增量(单位为s)
- float32 scan_time #两次扫描之间的时间间隔(单位为s)
- float32 range_min #距离最小值(m)
- float32 range_max #距离最大值(m)
- float32[] ranges #测距数据(m,如果数据不在最小数据和最大数据之间,则抛弃)
- float32[] intensities #强度,具体单位由测量设备确定,如果仪器没有强度测量,则数组为空即可
Point.msg
- #空间中的点的位置
- #文件位置:geometry_msgs/Point.msg
-
- float64 x
- float64 y
- float64 z
Pose.msg
- #消息定义自由空间中的位姿信息,包括位置和指向信息
- #文件位置:geometry_msgs/Pose.msg
-
- Point position
- Quaternion orientation
PoseStamped.msg
- #定义有时空基准的位姿
- #文件位置:geometry_msgs/PoseStamped.msg
-
- Header header
- Pose pose
PoseWithCovariance.msg
- #表示空间中含有不确定性的位姿信息
- #文件位置:geometry_msgs/PoseWithCovariance.msg
-
- Pose pose
- float64[36] covariance
Power.msg
- #表示电源状态,是否开启
- #文件位置:自定义msg文件
- Header header
- bool power
- ######################
- bool ON = 1
- bool OFF = 0
Twist.msg
- #定义空间中物体运动的线速度和角速度
- #文件位置:geometry_msgs/Twist.msg
-
- Vector3 linear
- Vector3 angular
TwistWithCovariance.msg
- #消息定义了包含不确定性的速度量,协方差矩阵按行分别表示:
- #沿x方向速度的不确定性,沿y方向速度的不确定性,沿z方向速度的不确定性
- #绕x转动角速度的不确定性,绕y轴转动的角速度的不确定性,绕z轴转动的
- #角速度的不确定性
- #文件位置:geometry_msgs/TwistWithCovariance.msg
-
- Twist twist
- float64[36] covariance #分别表示[x; y; z; Rx; Ry; Rz]
Odometry.msg
- #消息描述了自由空间中位置和速度的估计值
- #文件位置:nav_msgs/Odometry.msg
-
- Header header
- string child_frame_id
- PoseWithCovariance pose
- TwistWithCovariance twist
四、 Service通信
我们知道topic是ROS中的一种单向的异步通信方式。然而有些时候单向的通信满足不了通信要求,比如当一些节点只是临时而非周期性的需要某些数据,如果用topic通信方式时就会消耗大量不必要的系统资源,造成系统的低效率高功耗。
这种情况下,就需要有另外一种请求-查询式的通信模型。这节我们来介绍ROS通信中的另一种通信方式——service(服务)。
service方式在通信模型上与topic做了区别。Service通信是双向的,它不仅可以发送消息,同时还会有反馈。所以service包括两部分,一部分是请求方(Clinet),另一部分是应答方/服务提供方(Server)。这时请求方(Client)就会发送一个request,要等待server处理,反馈回一个reply,这样通过类似“请求-应答”的机制完成整个服务通信。
这种通信方式的示意图如下:
Node B是server(应答方),提供了一个服务的接口,叫做/Service,我们一般都会用string类型来指定service的名称,类似于topic。Node A向Node B发起了请求,经过处理后得到了反馈。
过程
Service是同步通信方式,所谓同步就是说,此时Node A发布请求后会在原地等待reply,直到Node B处理完了请求并且完成了reply,Node A才会继续执行。Node A等待过程中,是处于阻塞状态的成通信。这样的通信模型没有频繁的消息传递,没有冲突与高系统资源的占用,只有接受请求才执行服务,简单而且高效。
3. topic VS service比较
我们对比一下这两种最常用的通信方式,加深我们对两者的理解和认识,具体见下表:
| 名称 | Topic | Service |
|---|---|---|
| 通信方式 | 异步通信 | 同步通信 |
| 实现原理 | TCP/IP | TCP/IP |
| 通信模型 | Publish-Subscribe | Request-Reply |
| 映射关系 | Publish-Subscribe(多对多) | Request-Reply(多对一) |
| 特点 | 接受者收到数据会回调(Callback) | 远程过程调用(RPC)服务器端的服务 |
| 应用场景 | 连续、高频的数据发布 | 偶尔使用的功能/具体的任务 |
| 举例 | 激光雷达、里程计发布数据 | 开关传感器、拍照、逆解计算 |
注意:远程过程调用(Remote Procedure Call,RPC),可以简单通俗的理解为在一个进程里调用另一个进程的函数。

