
热门标签
热门文章
- 1一个关于DeepNude使用的图像生成和图像修复相关技术项目_deepnude在线生成
- 2一个超赞的开源的图片去水印解决方案
- 3iOS CocoaPods安装和使用图解
- 4将迁移学习用于文本分类 《 Universal Language Model Fine-tuning for Text Classification》_迁移学习和元学习用于文本分类
- 5[文本挖掘和知识发现] 02.命名实体识别之基于BiLSTM-CRF的威胁情报实体识别万字详解
- 6LDA的优化算法:拟牛顿法_lda 优化
- 7编写一个程序,从键盘上输入一组学生的分数,计算平均分数,并计算失败的学生人数。_编写程序,输入一批学生的成绩
- 8Plugin [id: ‘com.android.application‘, version: ‘8.1.3‘, apply: false] was not found_plugin [id: 'com.android.application', version: '8
- 9PS2游戏操纵杆_ps2摇杆模块的使用
- 10git指令练习_怎么练习git 命令
当前位置: article > 正文
欧拉角四元数转换_欧拉角转四元数
作者:Monodyee | 2024-04-14 15:28:10
赞
踩
欧拉角转四元数
欧拉角四元数转换
1,欧拉角:Z轴(航偏角,yaw,Ψ) , Y轴(俯仰角,pitch,θ) ,X轴(滚转角,roll,Φ);
2,导航坐标系(N系)为O-ENU坐标系,即东北天坐标系。且机体坐标系初始状态与导航坐标系重合;
3,每个轴都以逆时针旋转的角度为正。
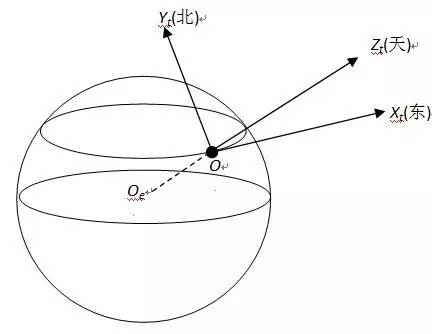
导航坐标系

机体坐标系
第一步:求姿态矩阵
1、旋转Z轴
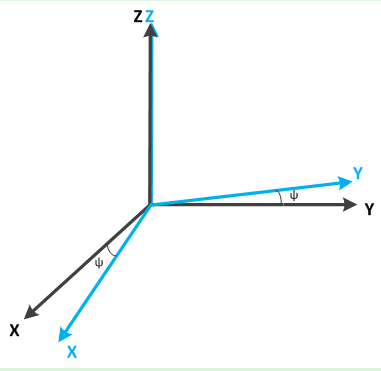
旋转前坐标:(x0, y0, z0), 旋转后坐标:(x1, y1, z1)

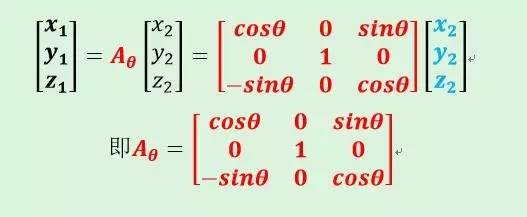
2、旋转Y轴

旋转前坐标:(x1, y1, z1), 旋转后坐标:(x2, y2, z2)
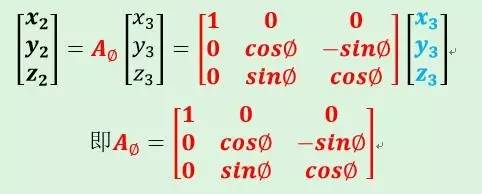
3、旋转X轴

旋转前坐标:(x2, y2, z2), 旋转后坐标:(x3, y3, z3)
4、设导航坐标系(N系)坐标为(x0, y0, z0),
载体坐标系(B系)坐标为(x3, y3, z3)
则:

二、四元数旋转矩阵
设旋转前坐标:(x0, y0, z0), 旋转后坐标:(x3, y3, z3)

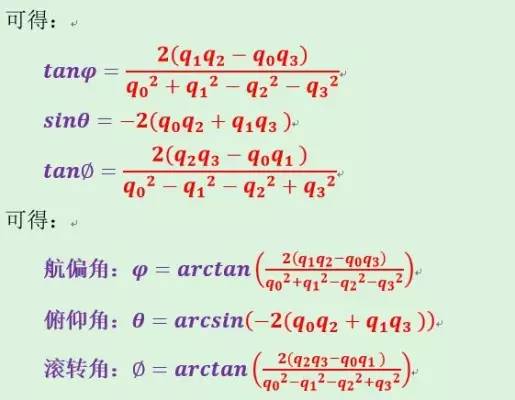
三、四元数转换欧拉角

以上矩阵一一对应。
四、欧拉角转四元数
按照旋转顺序:ZYX

则(设旋转前坐标:(x0, y0, z0), 旋转后坐标:(x3, y3, z3)):

四元数与欧拉角(RPY角)的相互转换
https://www.cnblogs.com/21207-iHome/p/6894128.html
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

