
- 1【优选算法系列】【专题一双指针】第二节.202. 快乐数和11. 盛最多水的容器
- 2iframe嵌入本地视频或者http链接视频禁止自动播放_iframe 视频
- 3Git-常用功能_apply changes and mark resolved
- 4在银河麒麟系统上适配openGauss的具体实践_银河麒麟安装opengauss
- 5【深度学习】yolov5目标检测学习与调试
- 6【数组】【自定义排序】Leetcode 56. 合并区间
- 7FANUC机器人启动方式RSR和PNS的比较_rsr和pns的区别
- 8ES的嵌套文档的使用_es嵌套文档
- 9为什么要使用HTTP代理?(静态独享IP)
- 10android 手机远程助手,安卓远程桌面软件
STM-32:I2C外设总线—硬件I2C读写MPU6050_硬件i2c读取mpu6050
赞
踩
一、I2C外设简介
STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担【对比USART外设是串口通信的的硬件收发器】
支持多主机模型【分为固定多主机和可变多主机,STM32为可变多主机】
支持7位/10位地址模式
10位地址模式下,发送的前2个字节为地址,其中前5位是10位寻址的标志位(11110),后10位是地址位
支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
支持DMA
兼容SMBus协议(主要用于电源管理系统中)
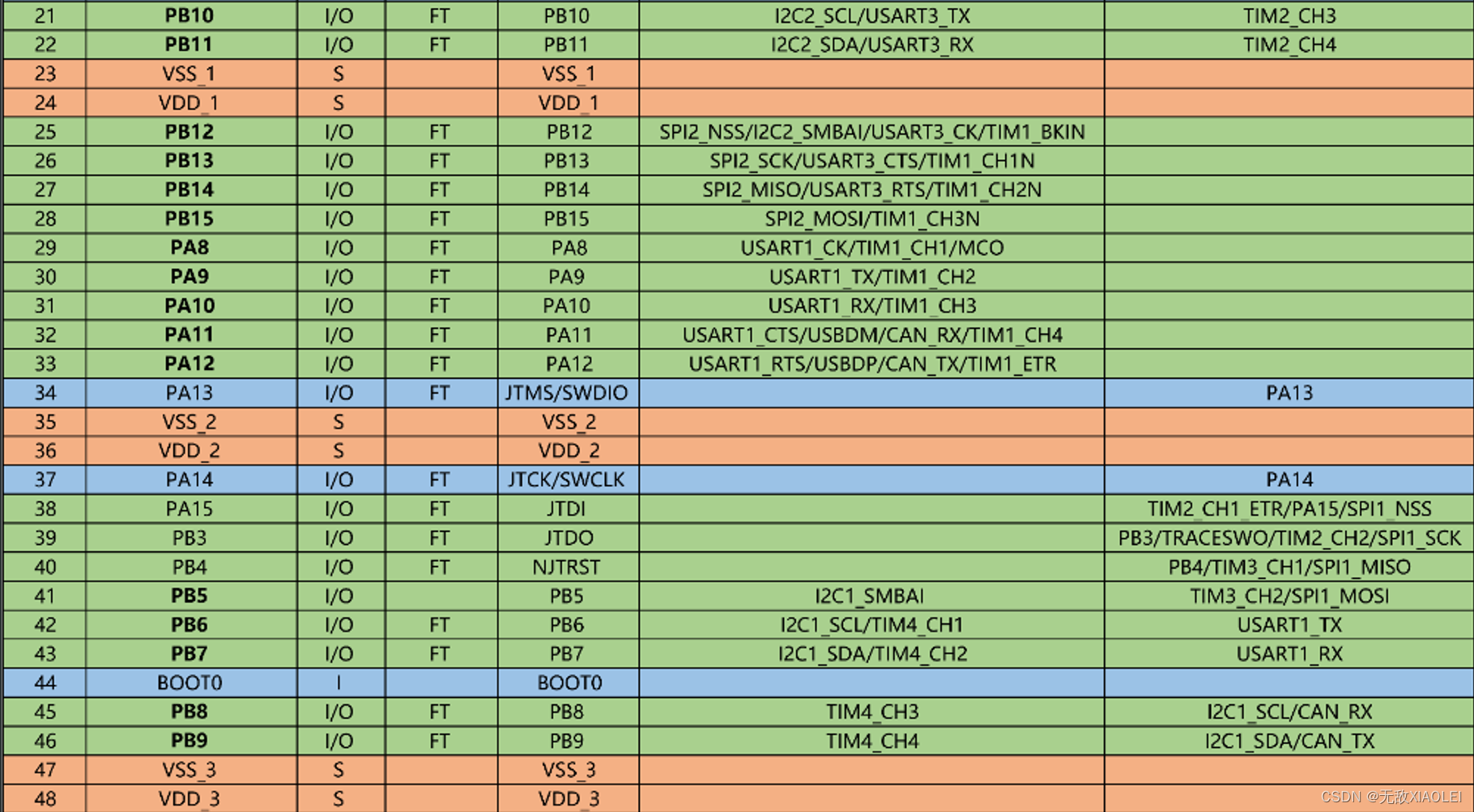
STM32F103C8T6 硬件I2C资源:I2C1、I2C2
二、I2C框图
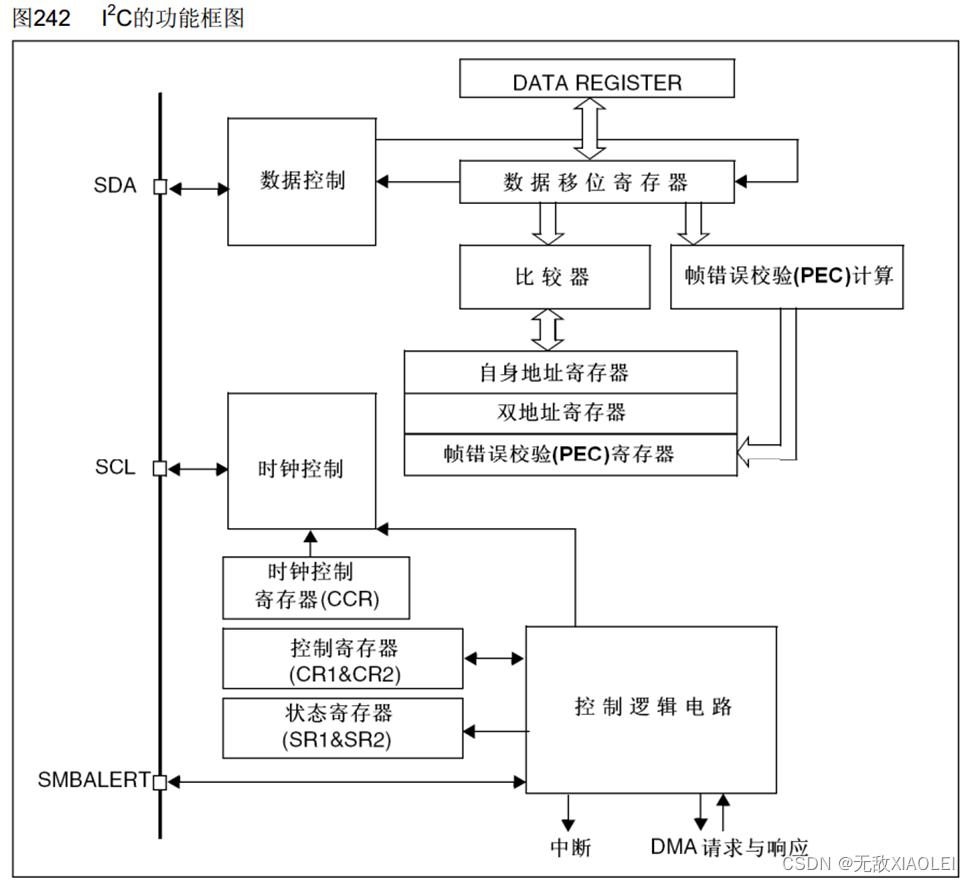
主要操作控制寄存器(CR),数据寄存器(DR),状态寄存器(SR)
引脚设定
当数据从数据寄存器转到移位寄存器时,就会置状态寄存器TXE为1,表示发送寄存器为空
当数据从移位寄存器转到接收寄存器时,就会置状态寄存器RXNE为1,表示接收寄存器非空
自身地址寄存器:设定从机地址
双地址寄存器:也是设定从机地址
比较器:stm32作为从机时有从机地址,会将收到的寻址通过比较器进行判断
三、I2C基本结构
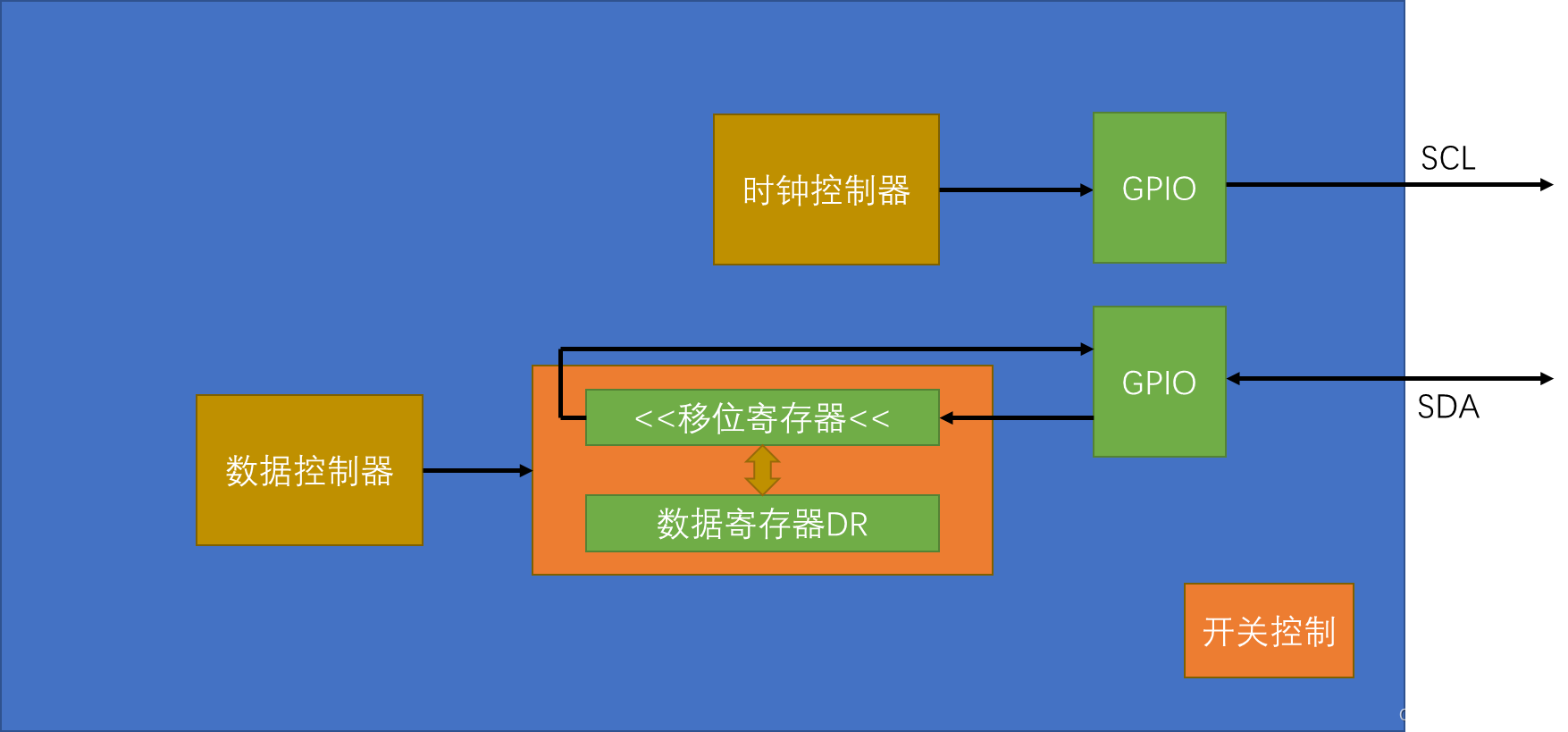
I2C通信是高位先行
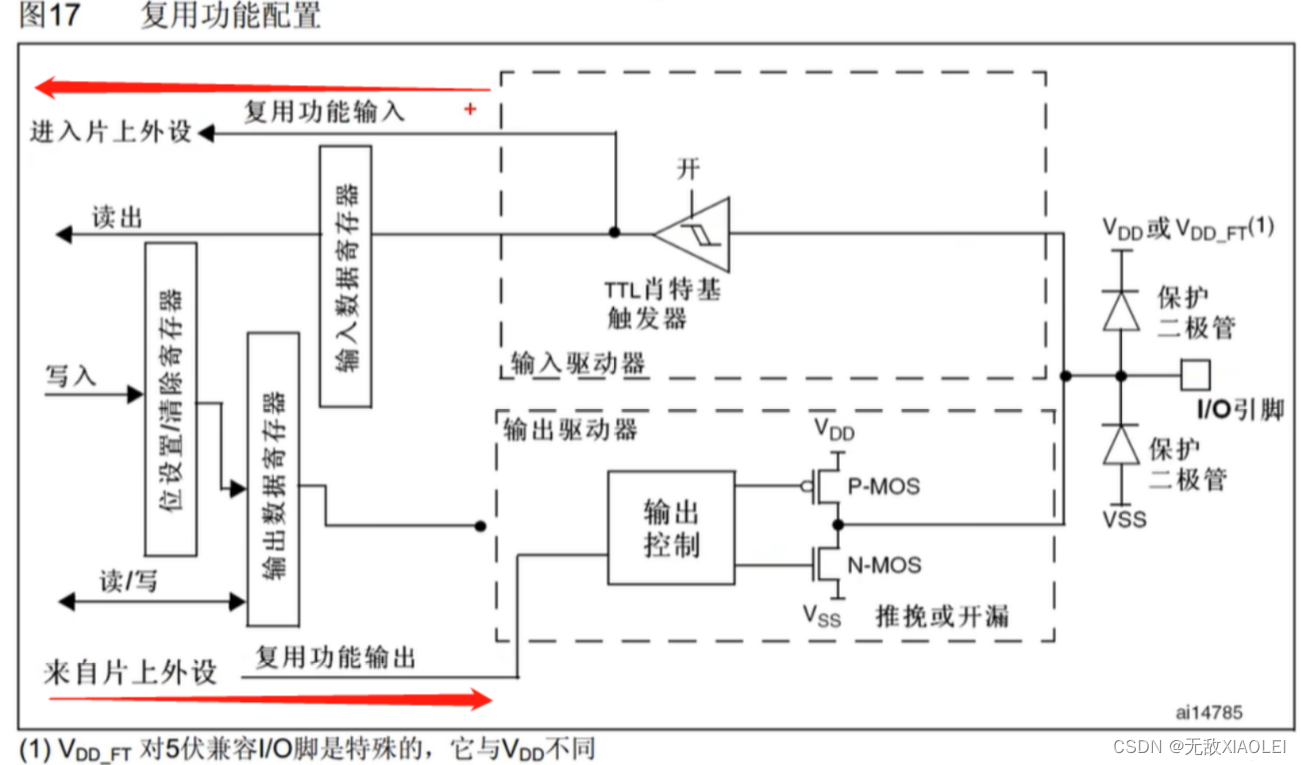
使用硬件I2C时,GPIO口的模式为复用开漏输出
对于SDA线的GPIO口,可以完成复用开漏输出和复用功能输入,【硬件I2C使用复用开漏模式,软件I2C采用通用开漏模式】
四、主机发送
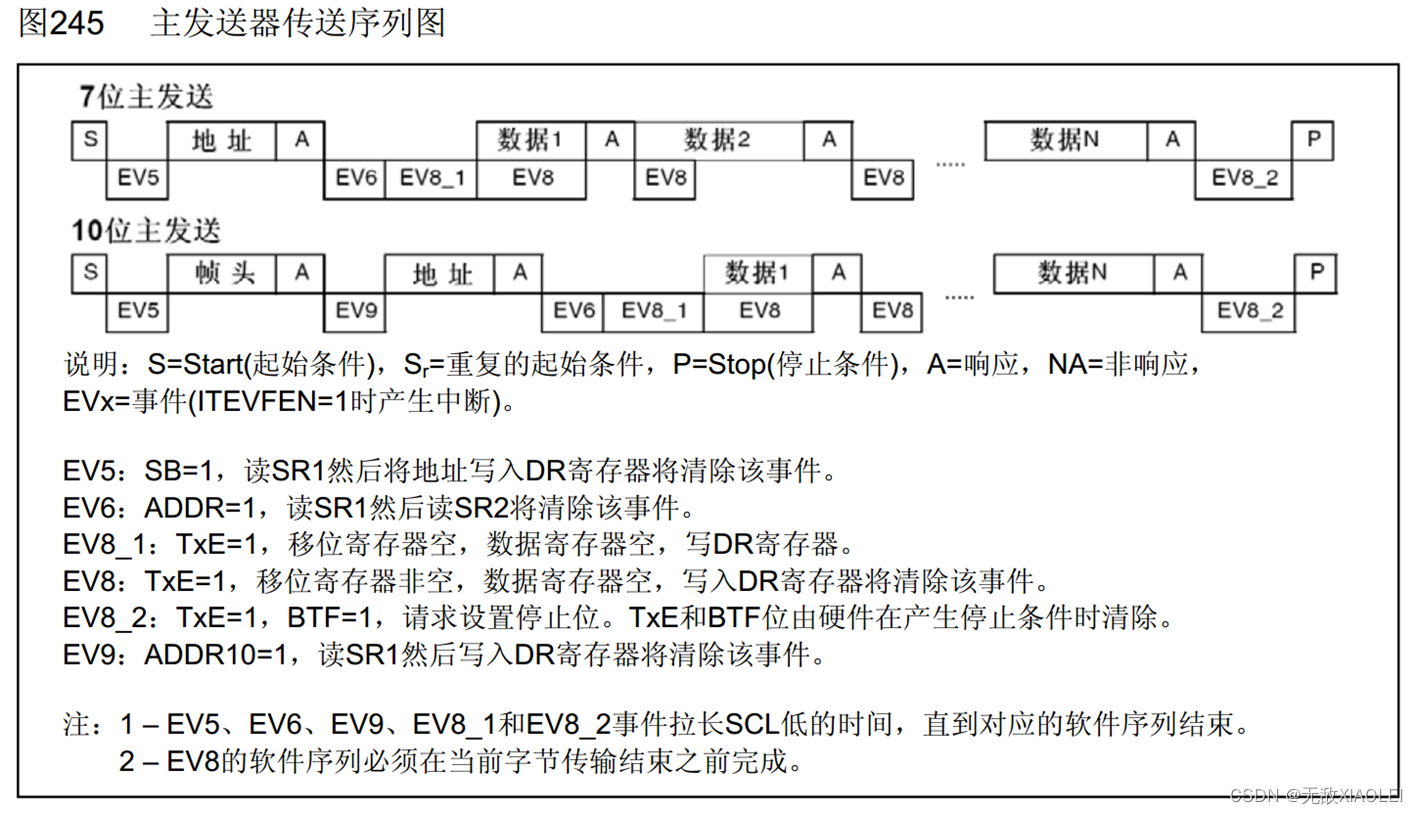
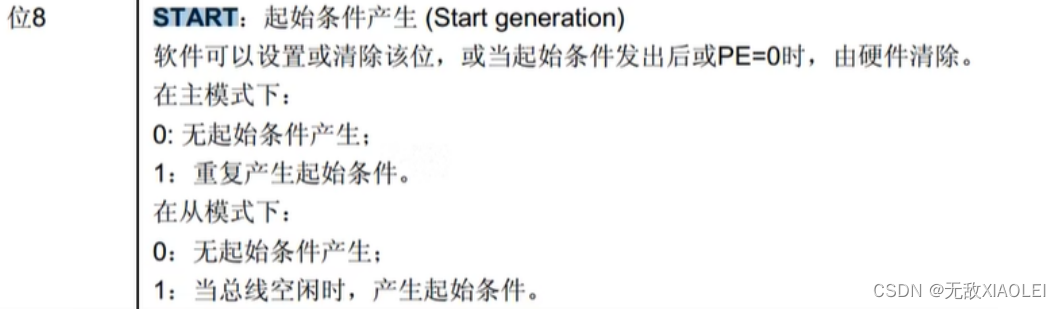
起始条件写1,当起始条件发出后自动清零,接口在生成起始条件后自动从从模式切换到主模式
EV5事件修改了SB标志位,也是由硬件自动清零
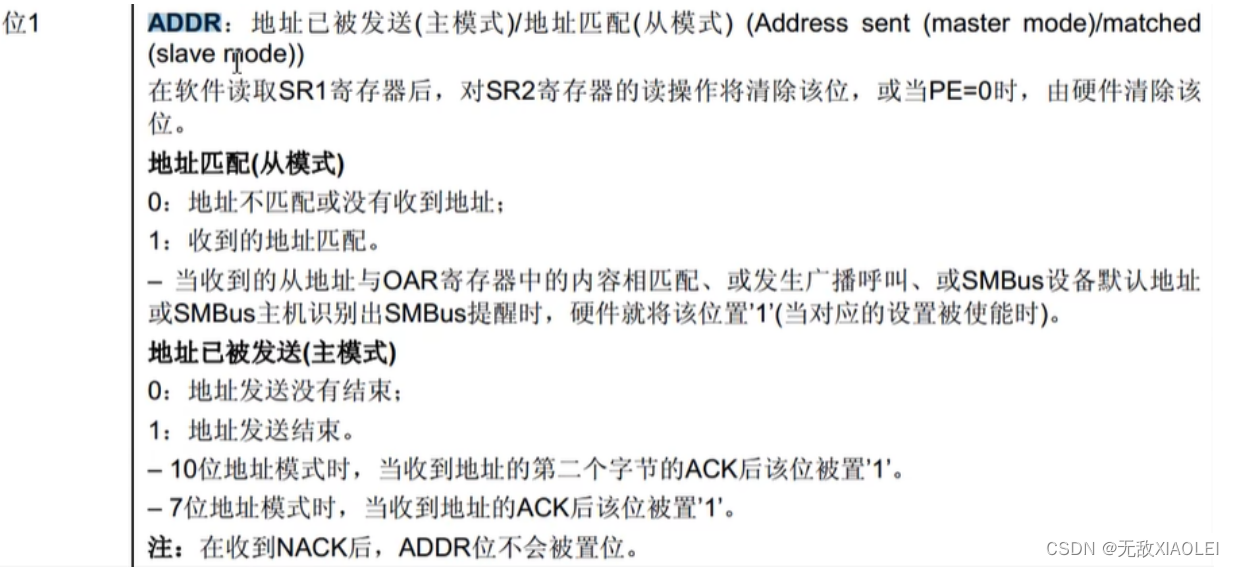
EV6事件修改ADDR标志位,在主模式下表示地址发送结束
EV8事件修改TXE标志位,此时数据寄存器为空,移位寄存器非空,可以写入新的数据到DR中,该状态表示移位寄存器正在发送数据
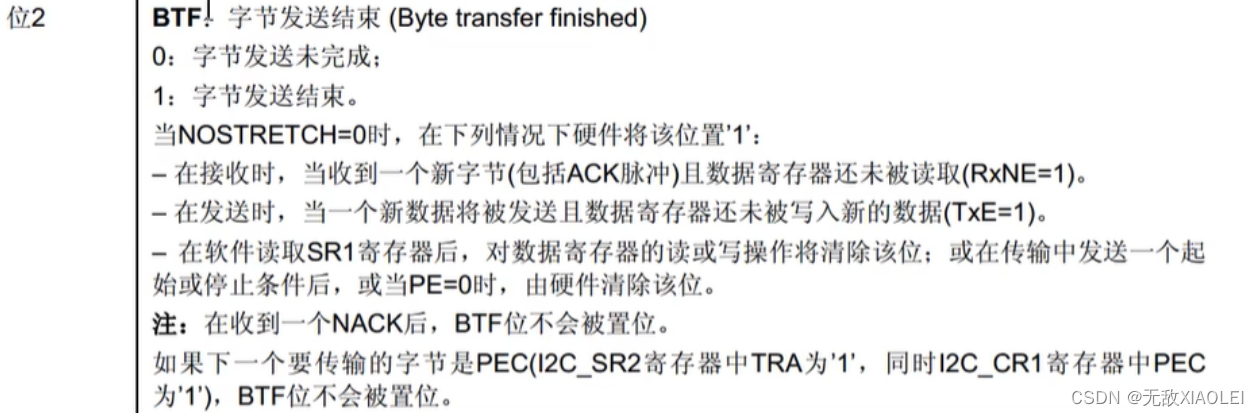
EV8_2事件修改BTF标志位,表示字节发送结束
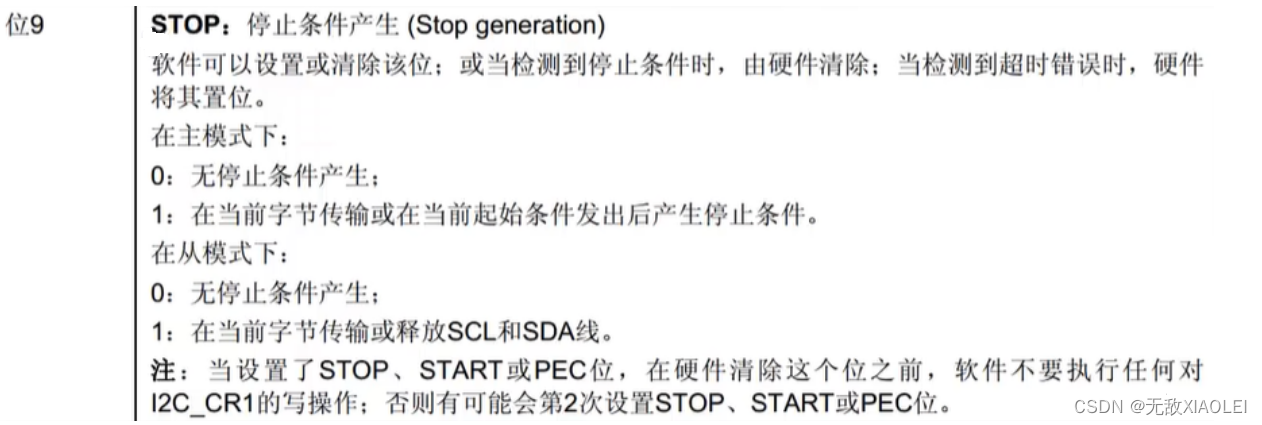
停止条件P写1
五、主机接收
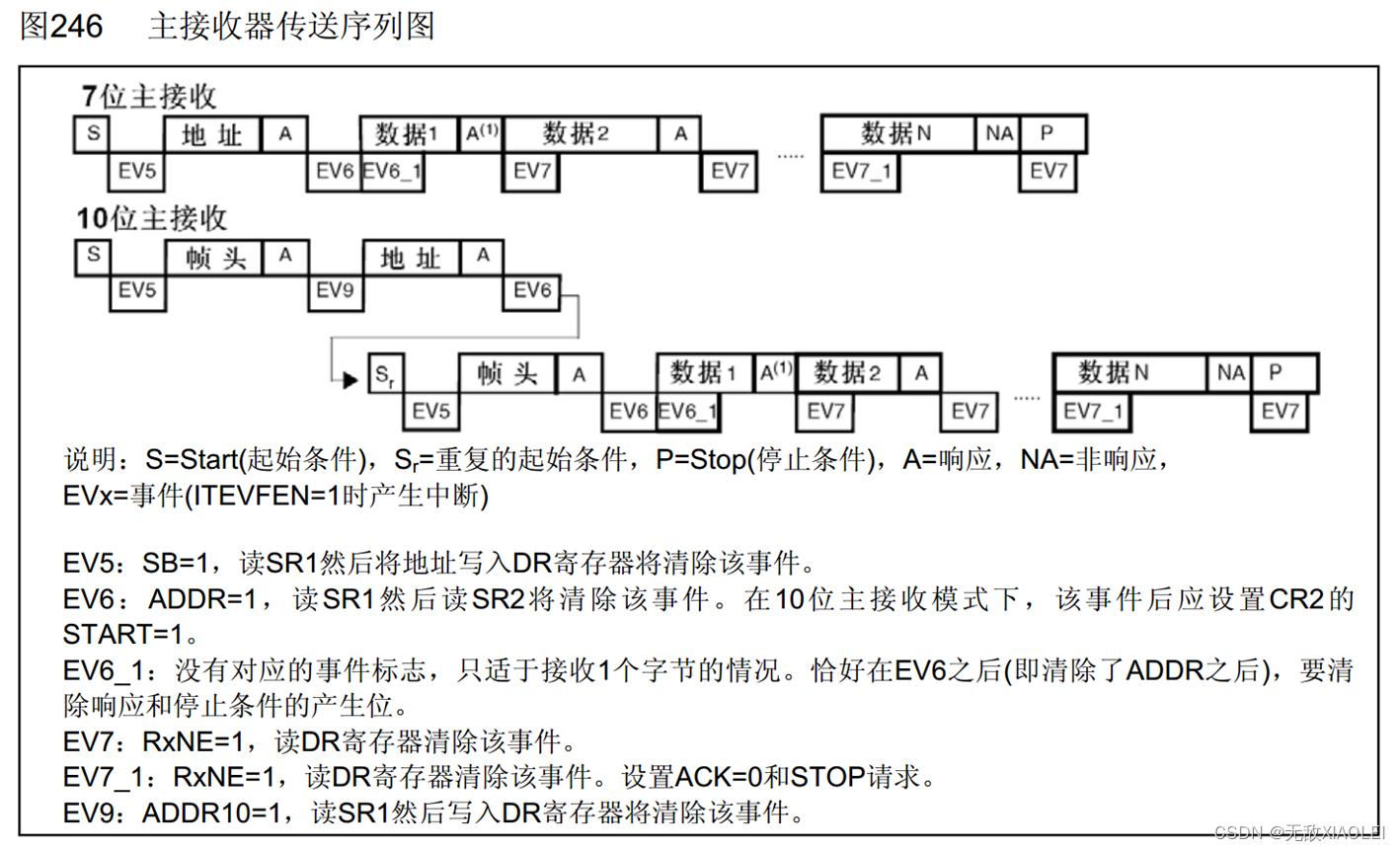
EV7事件修改RXNE标志位,此时DR寄存器非空,移位寄存器为空
六、I2C的中断请求

七、软件/硬件波形对比
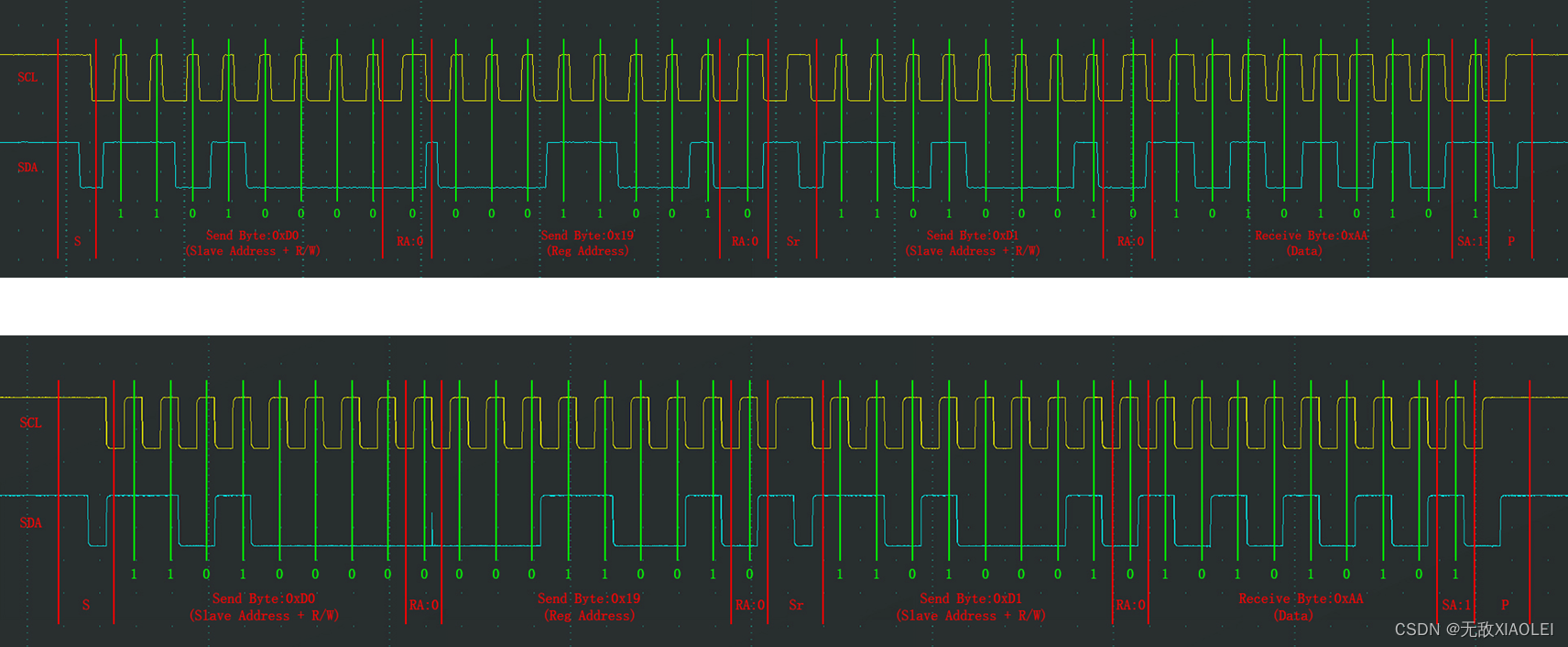
I2C同步时序对于波形的要求不高,硬件I2C的波形更加标准
八、应用实例:硬件I2C读写MPU6050
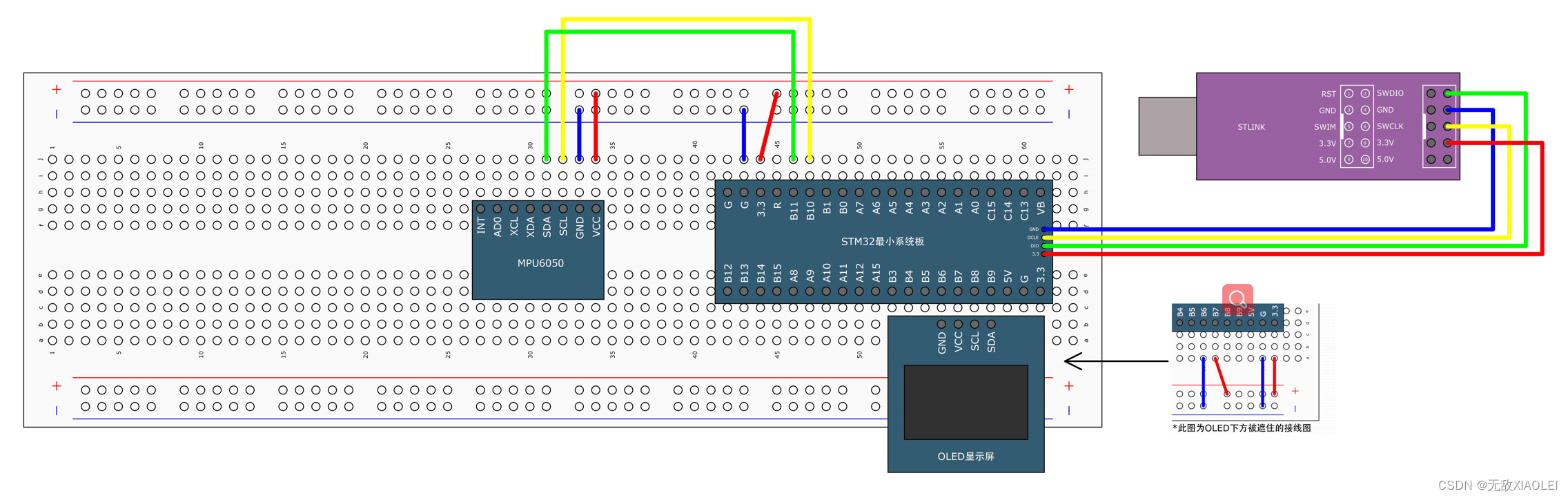
8.1接线图
8.2程序代码
MPU6050.c
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
//等待和超时退出函数
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
}
//指定地址写
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);//生成起始条件
/*非阻塞式函数需要通过状态标志位判断是否完成*/
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//检查EV5事件
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);//发送7位地址,读写标志位由第三个参数决定,该函数自带接收应答的过程【接收数据也自带发送应答功能】
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//检查EV6事件
I2C_SendData(I2C2, RegAddress);//将数据写入DR寄存器,硬件自动转到移位寄存器
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);//检查EV8事件
I2C_SendData(I2C2, Data);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//检查EV8——2事件
I2C_GenerateSTOP(I2C2, ENABLE);//生成终止条件
}
//指定地址读,先指定地址写,再调用当前地址读
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
//指定地址写
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
I2C_SendData(I2C2, RegAddress);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);
//当前地址读
I2C_GenerateSTART(I2C2, ENABLE);//重复起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);//发送7位地址,读写标志位由第三个参数决定,不是发送则则置1,发送则为0
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//EV6事件
/*如果只需要接收一个字节,则在EV6事件之后需要ACK置0且配置stop标志位,否则会多读取一个字节
如果是接收多个字节则直接等待EV7事件,在EV7_1事件之前ACK置0且配置stop标志位为1*/
I2C_AcknowledgeConfig(I2C2, DISABLE);//配置ACK应答位为0
I2C_GenerateSTOP(I2C2, ENABLE);//配置停止位
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//等待EV7事件
Data = I2C_ReceiveData(I2C2);//将数据读取到DR寄存器,硬件自动转到移位寄存器
I2C_AcknowledgeConfig(I2C2, ENABLE);//恢复ACK应答位为1,方便指定地址收多个字节
return Data;
}
//硬件I2C初始化和指定地址写
void MPU6050_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//I2C初始化
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_ClockSpeed = 50000;//最大400KHz
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
/*在标准速度下占空比为1:1,在快速模式下设置才有用,有2个参数可以选择,
低电平:高电平分别是16:9和2:1,因为在scl低电平时sda会切换电平,
此时适当多分配低电平时间可以在快速模式下完成电平变化。*/
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;//配置ack应答位
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;//stm32作为从机可以响应多少位地址
I2C_InitStructure.I2C_OwnAddress1 = 0x00;//作为从机时设置自身地址1
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE);
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
//获取数据寄存器函数,参数为指针,指向各个数据寄存器的地址
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
MPU6050_Reg.h
使用宏定义,将寄存器地址用一个字符串表示
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C
#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
参考视频:江科大自化协

