
- 1面试ssss
- 2FPGA时序分析与约束(4)——时序分析,时序约束,时序收敛_时序约束和时序收敛
- 3Relu激活函数
- 4使用ELK进行业务数据分析和可视化_elk可以做数据可视化大屏吗?
- 5在消费级GPU调试LLM的三种方法:梯度检查点,LoRA和量化_automodelforcausallm.from_pretrained device_map
- 6查看SecureCRT保存的密码_securecrt密码保存在那里
- 7ChatGPT深度科研应用、数据分析及机器学习、AI绘图与高效论文撰写教程_chatgpt论文分析的gpts
- 8nn.BCEWithLogitsLoss中weight参数和pos_weight参数的作用及用法_bcewithlogitsloss pos_weight
- 9了解@Builder看了这篇文章就够了_@builder.default
- 10Composer详细使用及利用Composer在Github和Packagist库中发布项目_composer github
Halcon3D篇-3D预处理,滤波,点云筛选_halcon 点云滤波
赞
踩
前言
由于3D相机采集到的数据通常通过Tiff格式的深度图进行显示或者保存。
深度图与模型的互转可以访问另一篇博客:https://blog.csdn.net/m0_51559565/article/details/135362674
关于3D相机的数据采集,可以访问我们另一篇关于LMI3D相机SDK的二次开发:
https://blog.csdn.net/m0_51559565/article/details/134404394
一:处理流程
常见的3D数据通常以Z轴作为灰度值的深度图的形式出现。所以我们可以根据2D图的特性,对2D图先进行灰度二值化筛选,图像增强,滤波等方式提取特征点。转换为3D模型后可以通过对点云的欧式距离进行点云集的拆分。
二:灰度筛选与滤波
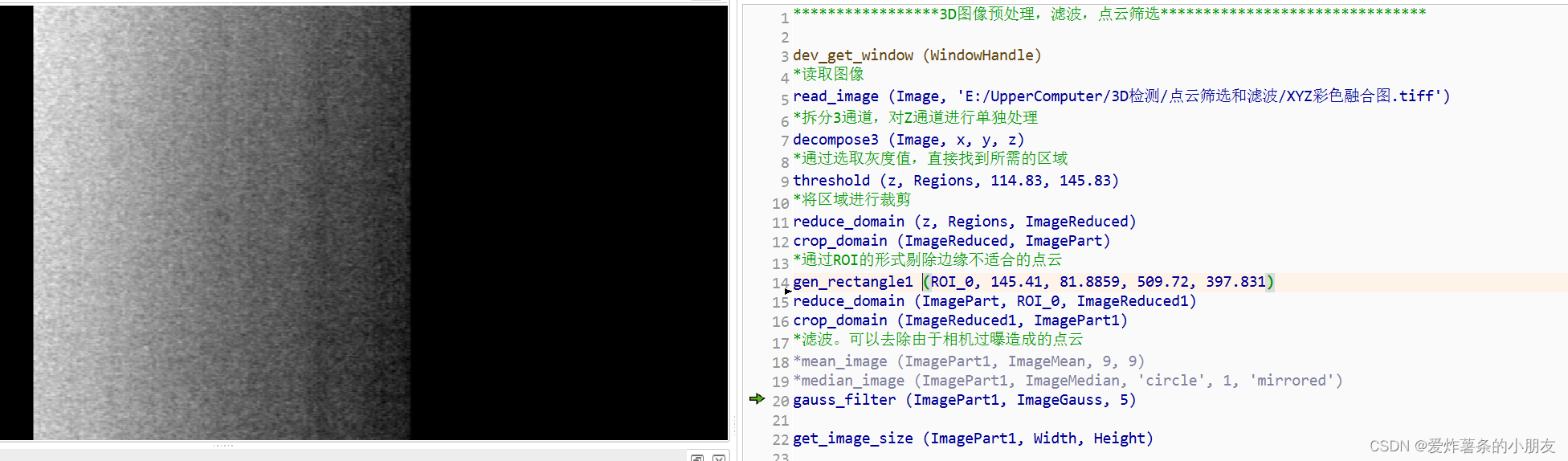
*读取图像 read_image (Image, 'E:/UpperComputer/3D检测/点云筛选和滤波/XYZ彩色融合图.tiff') *拆分3通道,对Z通道进行单独处理 decompose3 (Image, x, y, z) *通过选取灰度值,直接找到所需的区域 threshold (z, Regions, 114.83, 145.83) *将区域进行裁剪 reduce_domain (z, Regions, ImageReduced) crop_domain (ImageReduced, ImagePart) *通过ROI的形式剔除边缘不适合的点云 gen_rectangle1 (ROI_0, 145.41, 81.8859, 509.72, 397.831) reduce_domain (ImagePart, ROI_0, ImageReduced1) crop_domain (ImageReduced1, ImagePart1) *滤波。可以去除由于相机过曝造成的点云 *mean_image (ImagePart1, ImageMean, 9, 9) *median_image (ImagePart1, ImageMedian, 'circle', 1, 'mirrored') gauss_filter (ImagePart1, ImageGauss, 5)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
原始图像
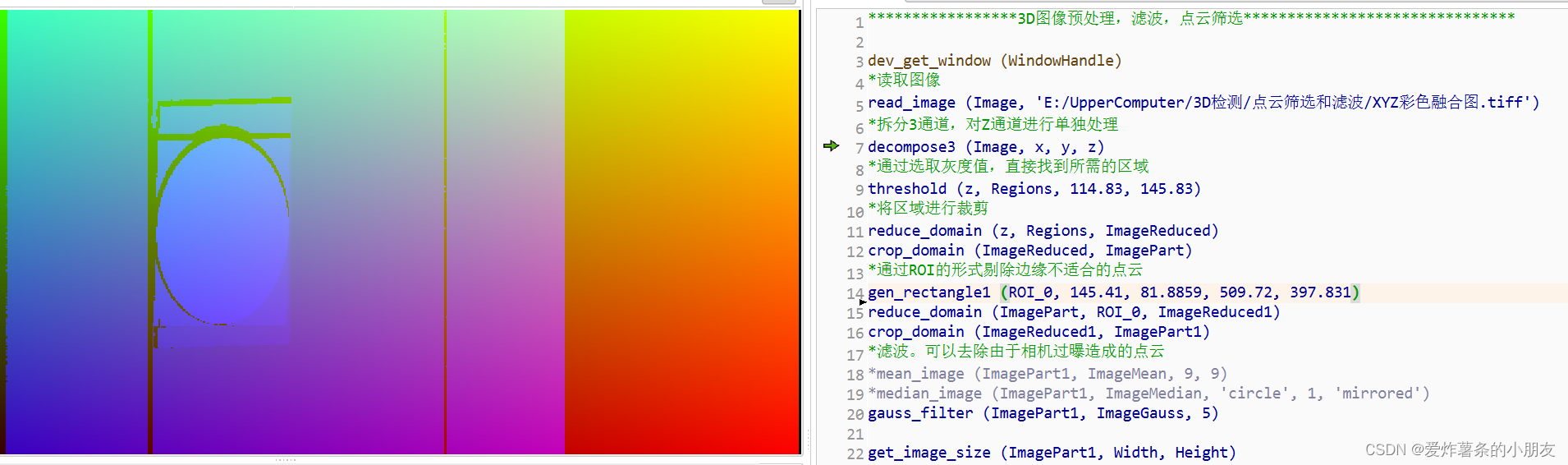
灰度二值化处理,与ROI拆分。在实际处理中,为了可以快速的完成对特征区域的匹配,通过会直接通过ROI的形式,当然不局限于还有,例如模板匹配,圆形测量等常用的2D图像提取方法。
三:点云筛选
在进行完预处理后,通常点云的去噪效果非常好,或者几何完成的情况。但是对于部分特殊情况。例如,由于相机过曝或者强反光的金属表面造成的点云波动,通常这类型的波动情况往往点云数少,高度差距小,所以比较难发现。
通常可以直接使用点云欧式距离。例如下面,对点云欧式距离大于5的点云进行区分(点云间的距离等于5个点的距离)。然后根据我们需要的点云数进行筛选即可
connection_object_model_3d (ObjectModel3D, 'distance_3d', 5, ObjectModel3DConnected)
select_object_model_3d (ObjectModel3DConnected, 'num_points', 'and', 100, 1000000000, ObjectModel3DSelected)
- 1
- 2
- 3
- 4
结尾
通常情况下说,灰度二值化将要测量的平面选取出来,然后进行均值滤波,让平面变得光滑,去除噪点,在通过选取ROI去除边缘点云采样不理想的区域。基本可以完成对点云的预处理了。最后根据点云间的距离,还可以进一步的去除噪点。到最后基本就可以完成对点云的处理,方式适用于大部分3D检测和缺陷检测的项目。但是对倾斜面无需抓取项目仍有待考究

