
- 1AMEYA360:蔡司辐射损伤智能分析方案
- 2面试题总结(简答)_容量测试 通用测试用例
- 3移动文件如何保留原有的权限设置
- 4IDEA安装及使用详细教程_csdn idea
- 5Exception in thread “main“ java.lang.NoClassDefFoundError: org/junit/platform/launcher/TestIdentifie_exception in thread "main" java.lang.noclassdeffou
- 6假设检验_零假设是我们的模型被正确指定,我们有强有力的证据来拒绝这个假设。因此,我们有充
- 7ORACLE-安装PL/SQL developer连接oracle数据库_pl/sql develop 安装并连接oracle
- 8pytorch入门3--一些概念补充、线性回归以及许多python,pytorch函数的用法_pytorch中def extractor代表什么意思
- 9chatGPT爆火,什么时候中国能有自己的“ChatGPT“_csdnchat 中国gpt
- 10python把视频取帧_用Python提取视频帧
轨迹评估工具使用总结(一) evo从安装到入门_evo画轨迹
赞
踩

evo是一款用于视觉里程计和slam问题的轨迹评估工具。核心功能是能够绘制相机的轨迹,或评估估计轨迹与真值的误差。支持多种数据集的轨迹格式(TUM、KITTI、EuRoC MAV、ROS的bag),同时支持这些数据格式之间进行相互转换。在此仅对其基本功能做简要介绍。
evo工具github地址:Home · MichaelGrupp/evo Wiki · GitHub
一、安装
安装方式极其简单,采用pip安装:
pip install evo --upgrade --no-binary evo
或者通过github下载源码后(https://github.com/MichaelGrupp/evo),使用源码安装:
pip install --editable . --upgrade --no-binary evo
安装时会自动安装相关依赖项。
安装完毕后,在命令行输入evo,若显示了相关信息,则表明安装成功。若提示"command not found"也不用惊慌,很多人遇到这种问题,重启电脑即可找到evo相应指令。
二、绘制轨迹
1. 基础指令
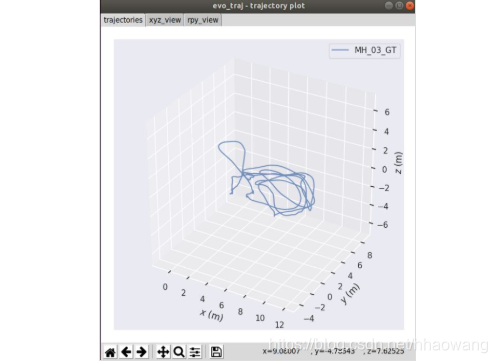
evo绘制轨迹的指令为:evo_traj,后跟必要参数有:数据的格式(tum/kitti/bag/euroc等)+ 轨迹文件。轨迹文件可以有多个,例如:
evo_traj tum traj1.txt traj2.txt
这个指令只是显示轨迹的基本信息,若要绘制轨迹,则增加可选参数 -p 或 --plot
evo_traj tum traj1.txt –p
2. 轨迹对齐
我们时常需要将估计轨迹与真实轨迹同时绘制,可采用指令:
evo_traj tum realTraj.txt estTraj.txt -p
然而存储时轨迹多为相对位置变化,所以绘制出的轨迹在初始位置上存在一定的位置和角度偏移,出现以下情况。

(如图所示,左图为绘制的两条曲线,通过调整可以发现两个曲线形状大体相同,但没有对齐,从而具有较大的误差)
这时我们采用对齐指令将两条轨迹进行对齐。为此我们需要通过--ref参数指定参考轨迹,并增加参数-a(或--align)进行对齐(旋转与平移)
evo_traj tum estTraj.txt --ref realTraj.txt -p -a
3. 轨迹尺度缩放
单目相机会存在尺度的不确定性,evo_traj 支持使用-s(或 --correct_scale)参数进行Sim(3)上的对齐(旋转、平移与尺度缩放)

(图片从左到右:两条未对齐曲线、曲线对齐后绘制结果、曲线通过尺度缩放后结果)
三、轨迹评估
evo可以评估两条轨迹的误差,主要有两个命令:
evo_ape:计算绝对位姿误差(absolute pose error),用于整体评估整条轨迹的全局一致性;
evo_rpe:计算相对位姿误差(relative pose error),用于评价轨迹局部的准确性。
这两个指令也支持evo_traj的可选参数,轨迹对齐-a与尺度缩放-s。完整指令如下:
evo_ape tum realTraj.txt estTraj.txt -a –s
此时将显示轨迹误差相关结果。

若增加可选参数-p,可以绘制误差相关曲线:

注意:在进行评估时,若经过了缩放,在命令行中应将真实轨迹(参考轨迹)放在估计轨迹(计算轨迹)前方,避免在缩放时参考轨迹错误而造成误差被错误缩放。
四、格式互相转换

五、进阶学习
这里只介绍了evo的基本操作,除此之外evo可以进行数据格式转化、曲线颜色配置、轨迹导出等多种功能,详细请参考evo在github上的wiki:
https://github.com/MichaelGrupp/evo/wiki
同时,可以在命令行通过-h参数查看当前evo指令的参数及相关说明。例如:
evo_traj tum –h
注意一定要输入完整的evo指令(evo_traj, evo_ape等),与必选参数,即数据格式(tum/kitti/euroc/bag)

