
- 1logstash通过kafka通道采集日志信息_logstash kafka consumer_threads
- 2NLP未来,路在何方?从学术前沿和业界热点谈起
- 3Resource punkt not found. Please use the NLTK Downloader to obtain安装nltk包(报错缺失punkt error 11004)报错_resource averaged_perceptron_tagger not found. ple
- 4类脑计算芯片:机器学习的新硬件革命
- 5java读取txt文件乱码解决方案
- 6自然语言处理(NLP)之三:语言模型_生成式语言模型文本特征
- 7linux驱动 平台设备驱动模型_linux设备驱动模型
- 8设计模式总结-外观模式(门面模式)
- 9OpenCV最全函数用法_opencv函数用法
- 10来自GitHub的系列渗透测试工具_ctf magic unicorn
斯坦福机器狗的设计与实现 四足机器人的组装全过程_斯坦福狗可不可以用pca9685
赞
踩
四足机器人的组装全过程
视频教程:
http://online.edu.senlanit.com/playback/playback?cid=a0844796-d979-4dd9-9f63-a44f505793df&vid=cae40e0c-db19-451b-8e0b-d55b2684aa1f&v=1111111111
进去以后搜索:斯坦福机器狗的设计与实现(黄老师)的第二课。
图示教程:
三维图:



蓝色:主控
绿色:舵机扩展板
红色:稳压版

下面绿色的为:电池
具体安装如下:
腿部完整形态:

腿部零件:
安装腿时注意左右对称。

组装完腿之后安装舵机:

组装好的腿插入舵机带的刀片:


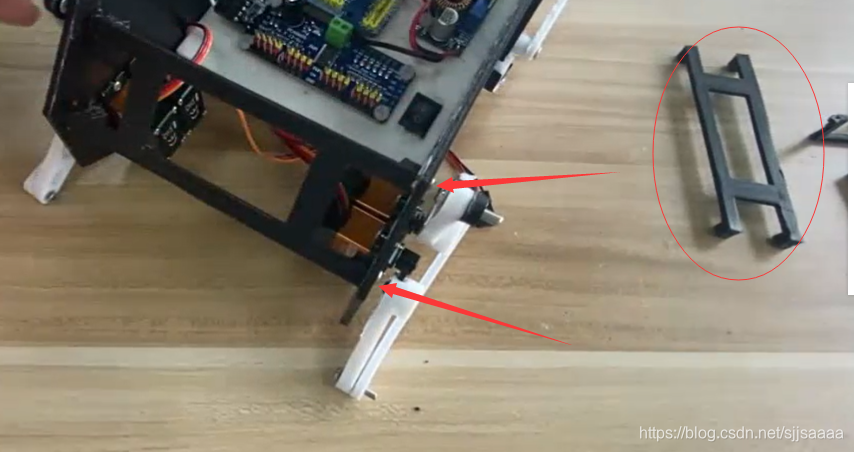
将电路电板固定在四条腿中间:

需要安装四个固定板,上俩个是粗的,下两个是细的。
电池安装在电路板的下侧,用螺丝固定好,大多数用的螺丝为:m2*10的。

制造的基本流程:

练习:
1、了解无刷舵机和普通舵机,数字舵机还有模拟舵机的区别,并写一篇详细的介绍文档
无刷直流电机:由电动机主体和驱动器组成,是一种典型的机电一体化产品。由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。中小容量的无刷直流电动机的永磁体,现在多采用高磁能积的稀土钕铁硼(Nd-Fe-B)材料。
普通电机:是指依据电磁感应定律实现电能转换或传递的一种电磁装置。它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。
普通电机采用换向机构连接线圈与电流。换向机构一个带有方向交换功能的换向器和电刷组成。
无刷电机一般将线圈安装在定子上,由安装在旋转轴上的磁铁驱动输出轴工作。为解决电流换向问题,采用霍尔器件测定磁铁磁极位置,控制外部换向电路工作,改变电流方向。无刷电机由于没有电刷的存在,使用寿命长,电机结构也得到了简化。
数字舵机和模拟舵机在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟舵机的最大区别则体现在控制电路上,数字舵机的控制电路比模拟舵机的多了微处理器和晶振。不要小看这一点改变,它对提高舵机的性能有着决定性的影响。模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置。
数字舵从根本颠覆了舵机的控制系统体系,相对于传统模拟舵机,数字舵机的两个优势是:
1.因为微处理器的关系,数字舵机可以在将动力脉冲发送到舵机马达之前,对输入的信号根据设定的参数进行处理。这意味着动力脉冲的宽度,就是说激励马达的动力,可以根据微处理器的程序运算而调整,以适应不同的功能要求,并优化舵机的性能。
2.数字舵机以高得多的频率向马达发送动力脉冲。就是说,相对与传统的50脉冲/秒,是300脉冲/秒。虽然,因为频率高的关系,每个动力脉冲的宽度被减小了,但马达在同一时间里收到更多的激励信号,并转动得更快。这也意味着不仅仅舵机马达以更高的频率响应发射机的信号,而且“无反应区”变小;反应变得更快;加速和减速时也更迅速、更柔和;数字舵机提供更高的精度和更好的固定力量。此外还有防抖动,响应速度快的优点。
2、了解iic协议,以及PCA9685如何通过IIC协议控制多个舵机
I2C(Inter-Integrated Circuit BUS) 集成电路总线,该总线由NXP(原PHILIPS)公司设计,多用于主控制器和从器件间的主从通信,在小数据量场合使用,传输距离短,任意时刻只能有一个主机等特性。
I2C 总线在物理连接上非常简单,分别由SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成。通信原理是通过对SCL和SDA线高低电平时序的控制,来 产生I2C总线协议所需要的信号进行数据的传递。在总线空闲状态时,这两根线一般被上面所接的上拉电阻拉高,保持着高电平。
在总线的一次数据传输过程中,可以有以下几种组合方式:
- 主机向从机发送数据,数据传送方向在整个传送过程中不变。
- 主机在第一个字节后,立即从从机读数据。
- 在传送过程中,当需要改变传送方向时,起始信号和从机地址都被重复产生一次,但两次读/写方向位正好反相。
I2C写操作流程为:
- 主机发起开始信号;
- 主机发送I2C地址 (7位) 和写操作0 (1位) , 等待确认;
- 从机发送确认;
- 主机发送寄存器地址 (8位) , 等待确认;
- 从机发送确认;
- 主机发送数据 (8位) , 即要向寄存器中写入的数据, 等待确认;从机发送确认;
- 主机发起停止。
I2C读操作流程为:
- 主机发送I2C地址 (7位) 和写操作0 (1位) , 等待确认;
- 从机发送确认;主机发送寄存器地址 (8位) , 等待确认;
- 主机发送开始;主机发送I2C地址 (7位) 和读操作 (1位) , 等待确认;
- 从机发送确认;从机发送数据 (8位) 。
- 主机发送确认。
PCA9685
通常PCA9685与舵机连接需要三根线, 分别是电源线、控制线和地线, 其中控制线是PWM脉冲的输出端, 电源线和地线为舵机内部的直流电机供电。舵机转动的角度和控制线PWM脉冲的宽度 (占空比) 成正比, 1ms对应0°, 2ms对应180°, 并且脉宽在1~2ms之间变化时, 舵机角度从0°~180°线性增长。因此, 要实现对舵机的控制, 需要在PCA9685正确的地址设工作模式、PWM脉冲的频率及占空比即可。
- 芯片访问地址的确认。PCA9685的访问地址由芯片的6位硬件地址引脚连接电平决定, 最高位为1不变, 最低位用于区分I2C通信的读写模式, 主控芯片通过该地址向PCA9685的不同寄存器写入不同数据, 就可以控制PCA9685向舵机发送想要的PWM脉冲。
- PMW脉冲频率的设置。PCA9685脉冲输出频率的范围为40~1000Hz, 一般舵机控制需要的频率为50Hz。
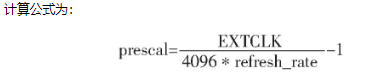
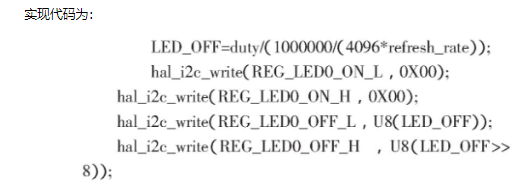
- 脉冲宽度的设置。
PCA9685的任一通道均有4个寄存器用于设置12位计数器以此来实现脉宽调节, 分别用于控制高电平开始到结束的时刻, 一般将LEDn_ON设置为0, 如果脉宽为duty, 则LEDn_OFF的计算公式如下:

3、针对课程内容,提出三点对于课程的疑惑和建议
这种亲自动手来授课的方式非常印象深刻,希望以后可以一直录一些安装零件的详细过程。
对于某个安装用的零件还不是很熟悉,有的不知道是什么,也不知道该怎么用的。
4、了解目前市面上几款常见的四足机器人的特点和区别、包括波士顿动力Spot mini,MIT 猎豹、宇树科技、蔚蓝这几家公司的产品,并写介绍总结文档
波士顿动力 Spot mini:
SpotMini是Spot机器人的新型且更加小型的机器人版本,加上机器臂是29.5千克,而且防水(这个功能好强大,不知道将来主人掉进水里它是不是可以施救)。一次充电可以跑90分钟,而且这个时间会随着完成不同的任务而有所浮动。因SpotMini是全部电动的,没有任何液压系统在身体上,所以是波士顿动力机器人里面最安静的机器人之一,但是电动也意味SpotMini的负重能力并不强,不过它的目标也并不在于此。
而且它的身体上还安装了大量的传感器,例如深度摄像机、姿态传感器、以及肢部的本体感受传感器。这些传感器可以帮助SpotMini完成各项复杂的动作以及巡航,这款机器人是可以自主地完成一些任务,但是很多时候需要人的协助来完成一些高难度的引导工作。
机械臂也是SpotMini的一大亮点,SpotMini的机械臂小巧轻便一些,它的主要任务就是抓个杯子,扔个垃圾,帮主人拿个饮料顺便卖个萌欺负下主人什么的,或者摔倒之后辅助站立。
对于视觉系统, IEEE Spectrum的作者Evan Ackerman猜测,SpotMini机器人可能使用了三个视觉传感器。
- 头部使用了MultiSense S7传感器进行前视,MultiSense SL传感器是一种三模态(激光、三维立体、视频)、高分辨率、高数据传输率、高精度的三维测距传感器。该传感器是适合使用在各种各样的机器人,自动化和传感应用,如自主车辆,三维映射和工作区的理解。MultiSense SL传感器封装在一个坚固的,紧凑的盒子里,采用低功耗的FPGA处理器,并预编程了因子校正。
- 尾部采用了Velodyne VLP-16传感器,它是Velodyne’s 3D雷达产品里最小、最新也最先进的一款产品。它比同等价位的传感器功能更强大,保留了Velodyne在激光雷达领域突破的主要特点:实时,360°,3D远程以及反射率的校准测量。
- 机器臂张开夹器的时候,里面是有摄像头的,而且可能这个摄像头也是完成抓取玻璃杯的主要传感器。
MIT猎豹:
MIT 研发猎豹机器人不依靠视觉和任何外部传感器,全凭控制算法,会纵身飞跃上桌,能轻松爬上满是障碍物的楼梯,甚至在突然被猛推或猛踢时迅速恢复平衡。
MIT迷你猎豹是全球首个能进行后空翻的四足机器人,除了后空翻,还有一个本领:不怕踹。当然,还是能踹倒。只不过,踹倒之后,迷你猎豹还能翻身站起来。它移动起来速度也挺快,是普通人步行速度的两倍,而且还能用各种步伐前进。
迷你猎豹是 MIT 仿生机器人实验室的产物,大的猎豹机器人可以腾空近 1 米高度跳到桌子上,由于采用的是腿式,而不是轮子,猎豹 3 能更好地在崎岖地形行走,它的稳定性十分可靠,甚至能依靠三只腿保持平衡。
在这次升级中,猎豹被有意设计成不需依赖摄像头或任何外部传感器就能完成所有这些任务。它能灵活地 “感觉” 周围的环境,工程师们称之为 “盲眼运动”(blind locomotion),就像人能穿过黑漆漆的房间一样。
宇树科技
宇树科技在2016年8月份成立,主要从事机电技术、控制技术,研发生产高运动性能机器人。作为一家四足机器人与动力系统部件研发商,宇树科技主要研发四足机器人移动平台以及相关动力系统部件,而这项技术基本原理是利用摆动曲柄滑块机构,把减速电机的旋转运动转换为驱动腿迈步的往复摆动运动,再利用简单连杆结构控制四条腿模拟动物的步态规律进行爬行运动。目前开发的四足机器人已经可以实现基本上下坡草地、简单的平衡功能并保证运动的稳定性。宇树科技通过设计电机、驱动器及整套控制系统和部分传感器,大大提高了机器人集成度。保证它在一些草地以及复杂情况下都有保持良好的稳定性。
2017 年 9 月,推出了全新重构的四足机器人——Laikago,这款机器人具有强劲的动力性能和运动稳定性。就动力系统而言,Laikago整机12个高性能电机,总瞬时最大功率为18KW,功率质量密度0.8KW/Kg。就运动稳定性而言,该机器人可上下20°坡度的草地、在有松软小石块地形上在行走,且对于一定幅值内的外部冲击干扰,具有自适应能力。
宇树科技主要有两款四足机器人:AlienGo和Unitree A1。
AlienGo定位为行业通用移动平台,多应用于实验室、商场等B端场景。AlienGo采用了全新设计的动力系统,更轻量集成,关节线缆完全内置走线,关节集成过载保护,极大地提升了减速器的寿命;相比激光雷达,AlienGo集成vSLAM,可以实时对地形和障碍物3D建图,更适合于低速移动机器人;AlienGo还集成人体2D/3D体感识别和手势识别,方便人机交互,比如自动跟随、人员行为预测等功能。
Unitree A1是本次在美国CES2020上发布的全新产品,面向C端,定位为教育酷玩产品,集成高清图传、自动跟随、建图壁障、开放编程接口等功能,是高性能四足机器人走进普通人生活的第一步,是四足机器人从1到N的一次新尝试。
小结:
机器人行业可简单地分为两大类:软件和硬件。要想使机器人能像人类一样的“思考”和行动,便需要将视觉交互、语音交互、运动控制能功能集合起来,将相关硬件模块虚拟化。
四足机器人的未来是走向大众,进一步走入普通人的生活中。尽管目前从技术成熟度的角度来看,我国的四足机器人仍需要时间去打磨,但随着行业的不断推进,四足机器人一定能不断深入到陪伴、安防、娱乐以及更多有意思的应用场景。


