
- 1护网行动及注意事项_护网行动报名条件
- 2flutter-web中使用js工具类_fluter 使用 js
- 3在Genymotion虚拟机上安装Google Apps_genymotion 安装gms
- 42024年还有人不知道Web3吗?_web3 csdn
- 5大学四年..就混了毕业证的我,出社会深感无力..辞去工作,从头开始_大学学的计算机混了个毕业证
- 6搭建DVWA漏洞环境靶场_dvwa靶场搭建
- 7Ubuntu20.04安装MongoDB
- 8Flink进阶篇-CDC 原理、实践和优化&采集到Doris中_flinkcdc sink doris
- 9python怎么创建一个文件夹,用python创建一个文件夹_python创建文件夹
- 10Android开发——BroadcastReceiver知识总结_粘性广播废弃
diy直立双足机器人_铁熊玩创客 | 桌面萌宠机器人 Pando,卖萌耍酷傲娇,分分钟融化你的心...
赞
踩
前段时间在知乎回答过一个问题:你有什么有单片机或开源硬件做的有意思的作品吗?
这是我的回答链接:
你有什么有单片机或开源硬件做的有意思的作品吗?www.zhihu.com没想到里面的视频播放量上万了,可是点赞数却是寥寥无几,本宝宝太伤心了。这里先分享其中一个机器人的制作教程,根据点赞量看心情是否分享其他作品的制作教程。
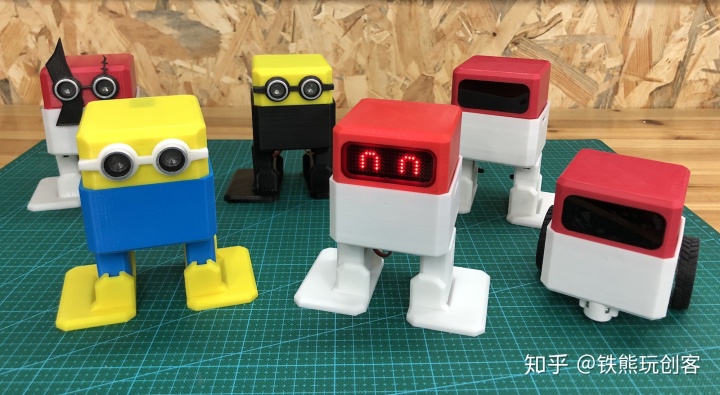
桌面萌宠机器人 Pando,卖萌耍酷傲娇,分分钟融化你的心
Pando 和 Pandy 机器人是我做的一对小巧玲珑的卖萌机器人组合。他们除了外形可爱会卖萌外,最大的特点是可以共用一个 3D 打印的核心头部结构,当头部加上双足,就变成了 Pando 双足机器人;当头部加上车轮,就变成了 Pandy 智能车。

Pando 还有很多近亲,比如小黄人、Otto 机器人等~
父亲带孩子,一窝随便扔……

你一定很好奇, Pando 具体可以做什么呢?
首先当然是看家本领──太空步
最近竟然还学会了抖腿!
最重要的是调皮又卖萌的大眼睛,简直是百变表情天后!
这么可爱的机器人,是不是迫不及待想入手一个?别急,马上教你做一个!
准备工作
准备好如下材料:
- DFRobot Romeo BLE mini V2.0 控制器 × 1
- DFRobot FireBeetle 24×8 LED点阵屏 × 1
- Tower Pro MG90S 舵机 × 4
- TTP223 触摸传感器 × 1
- MPU6050 六轴陀螺仪 × 1
- 模拟声音传感器 × 1
- 蜂鸣器 × 1
- 7.4V 锂电池 × 1
- 拨动开关2档3脚 SS-12F15G5 × 1
- 数据线 × 1
- 3D 打印结构件(头、身体、双腿、双足)
- 2mm 厚的半透明黑色亚克力
- 螺丝、螺帽若干
- 导线若干
- 热缩管若干

需要使用的工具如下:
- 3D 打印机
- 电烙铁
- 螺丝刀
- 热熔胶枪
- 502 胶水
墨镜的准备:使用半透明黑色亚克力用激光切割好 Pando 的“墨镜”,外形如上图中黑色长方形亚克力,图纸见附件。
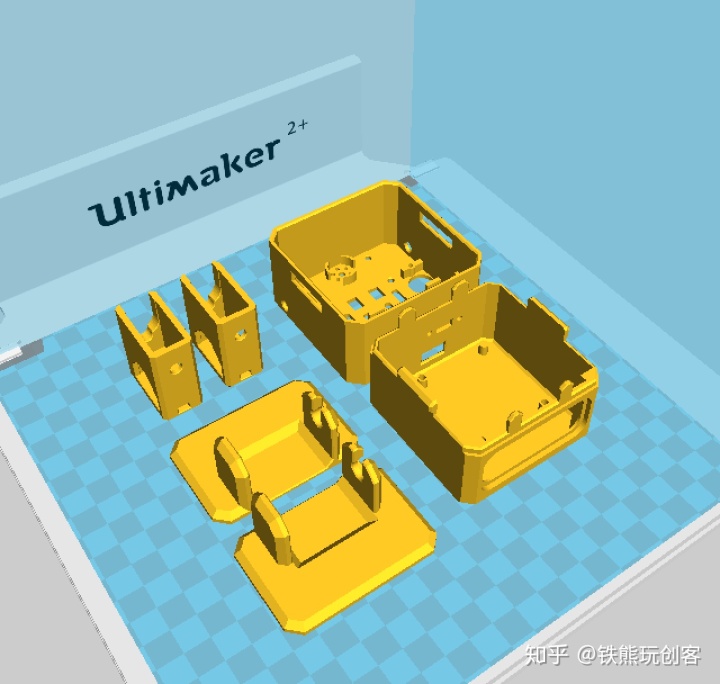
Pando 外形的准备:然后将 Pando 的外形 3D 打印出来,你可以选择自己喜欢的颜色进行打印。
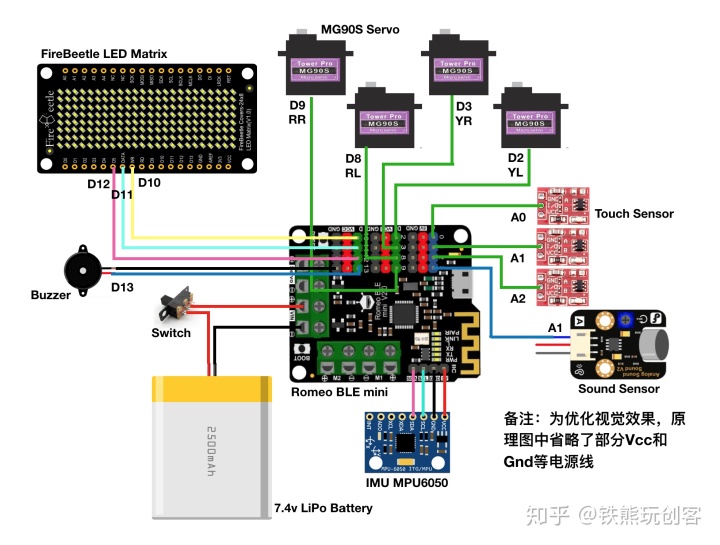
电路原理图
Pando 机器人集成了触摸传感器、声音传感器、六轴陀螺仪、蜂鸣器、LED点阵、舵机、蓝牙等模块,还能集成更多的扩展,电路原理图如下:
制作过程
【捣鼓车间】桌面萌宠Pando机器人DIY组装教程@铁熊_腾讯视频v.qq.com
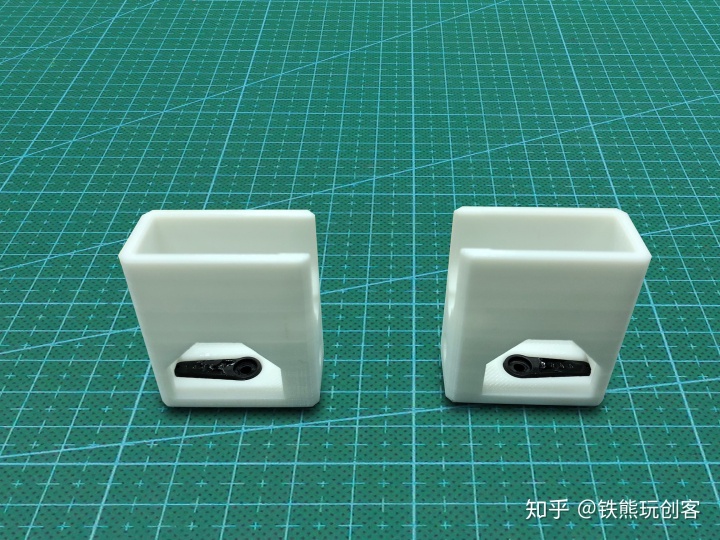
1、首先用502胶水将舵机臂(下图中黑色部分)与 Pando 机器人的两腿固定在一起。
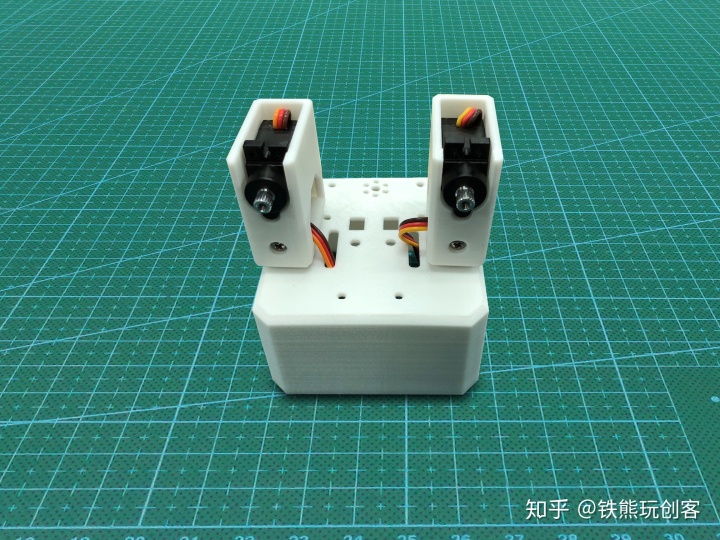
2、然后将两个舵机固定到 Pando 的身体结构中。

3、利用舵机臂,将双腿与身体相连。
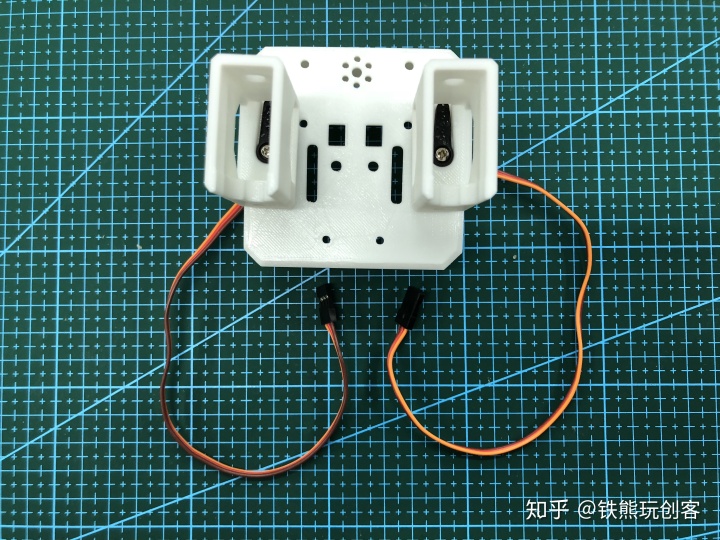
4、将两个舵机嵌入到双腿中,并用螺丝拧紧。
5、利用舵机臂,将双腿与双足进行连接。

6、准备好 IMU 陀螺仪传感器和触摸传感器,利用热熔胶将他们固定到 Pando 的头部。


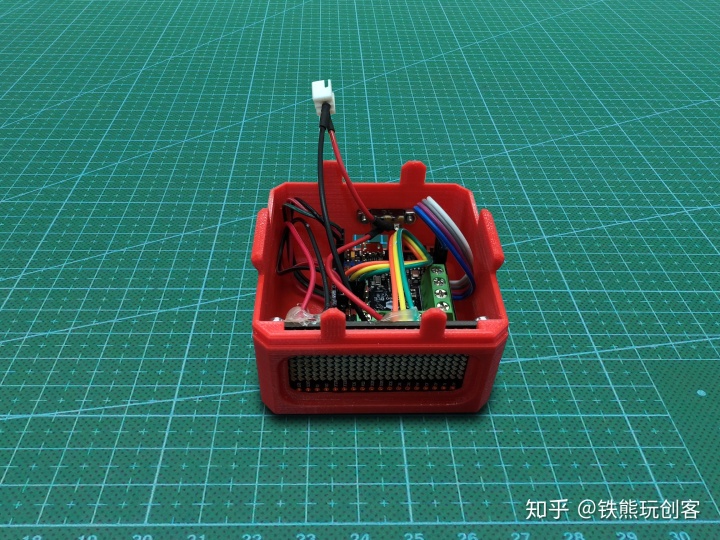
7、将电源开关连接到 Romeo mini 主控板上。

8、将 Romeo 主控板与电源开关固定到 Pando 的头部。

9、将 LED 点阵固定到 Pando 的头部,用螺丝拧紧,并根据电路图连接导线。
10、根据电路图,将4个舵机连接到 Romeo mini 主控板相应的位置。

11、准备好声音传感器、蜂鸣器、电池,并将他们连接到 Romeo mini 主控板上的对应位置。

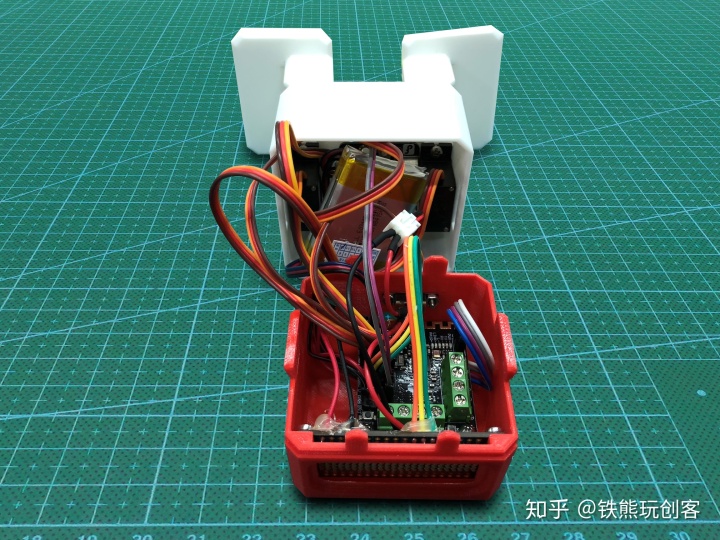
12、最后将 Pando 的头部与身体用卡扣卡紧,Pando 就完成啦。

其他
Pando 集成了触摸传感器、声音传感器、三轴陀螺仪、三轴加速度传感器、蜂鸣器、LED 点阵、4 个舵机、蓝牙等非常多的功能,你可以通过程序去释放所有元器件的潜能,可以说 Pando 具有非常多的可能性,期待看到你的 “Pando”。
至于怎么去控制 Pando 运动,网上有很多双足机器人的编程案例,这里就不再赘述了。
最后再打个小广告,不嫌弃的话,欢迎关注我的个人公众号“铁熊玩创客”,不 kan 定 xin 期 qing 更新创客制作、技术教程以及一些胡言乱语。


