
热门标签
热门文章
- 1【小红书笔试题汇总】[全网首发]2024-04-07-小红书春招笔试题-三语言题解(CPP/Python/Java)_小红书笔试题解
- 2魔百盒CM311-3S_MSO9385芯片_U盘卡刷固件包
- 3翻译: 什么是ChatGPT 通过图形化的方式来理解 Transformer 架构 深度学习二
- 4【自动驾驶】总目录(持续更新)_自动驾驶归档清单
- 5关于HTTP和HTTPS安全_如何解决http网站证书安全
- 6kotlinwindows桌面开发,Android高级开发岗必问知识点_kotlin桌面端
- 7Linux文件系统与日志分析_多节点服务日志汇总
- 8Python实现基于深度学习的图像风格迁移_深度学习图片风格化实现
- 9carboxyl-PEG-Amino 氨基聚乙二醇羧酸 NH2-PEG2000-COOH
- 10【FPGA实现除法器】——基于Verilog HDL的设计与实现_verilog实现除法器
当前位置: article > 正文
【路径规划】使用垂距限值法与贝塞尔优化A星路径
作者:weixin_40725706 | 2024-05-06 05:50:55
赞
踩
垂距限值法
在之前使用通用的A*算法来规划出路径之后,可以发现路径上其实是有许多的冗余点的,如下图所示:
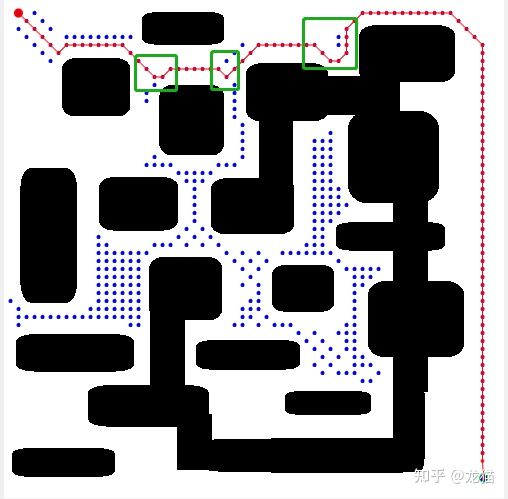
上图中可以明显看出有一些折弯点是冗余的,因此本节内容就介绍使用垂距限值法来优化冗余点。
垂距限值法
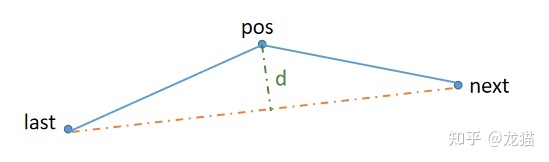
垂距限值法的思想也是比较简单的,概括一下就是:计算当前节点到上节点与下节点连线的距离,超过一定的阈值就从总集合中删除当前点。总体思想就如它的名字一样。
这里我写成了一个函数Vertical_distance_limit:
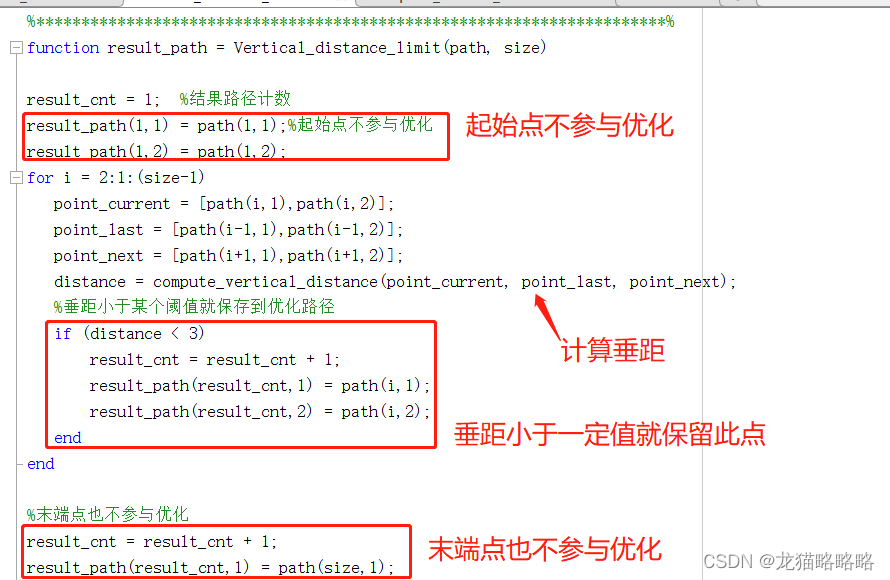
当然,此函数中我又封装了一个函数,即计算垂距的函数compute_vertical_distance
垂距计算
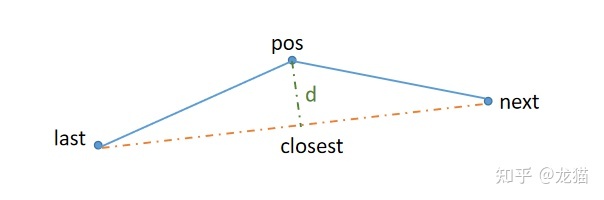
关于垂距计算,我们可以使用向量法,如下图所示:
使用向量法计算垂距的步骤可以按照如下来进行:
1) 先计算向量last_to_next的单位向量u_last_to_next
2) 计算向量last_to_pos,之后计算last_to_pos与向量u_last_to_next的点乘,即为last_to_pos到向量u_last_to_next上的投影长度L
3) 使用向量u_last_to_next乘以L即为向量last_to_closest
4) 使用last的坐标加上last_to_closest即可求出closest的坐标
5) 之后就可以求出pos与closest的距离
使用垂距限值法的效果
在增加了垂距优化后就可以得到如下的效果:
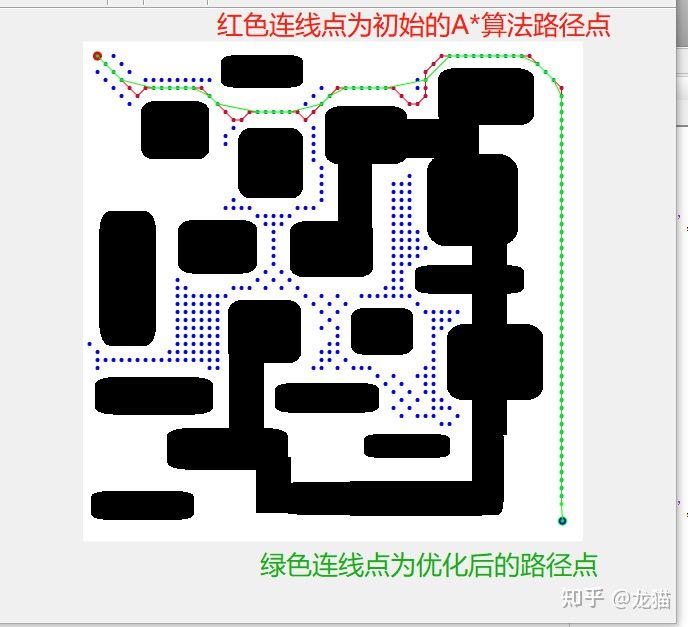
上图中红色连线点为初始的A*算法路径点,绿色连线点为优化后的路径点
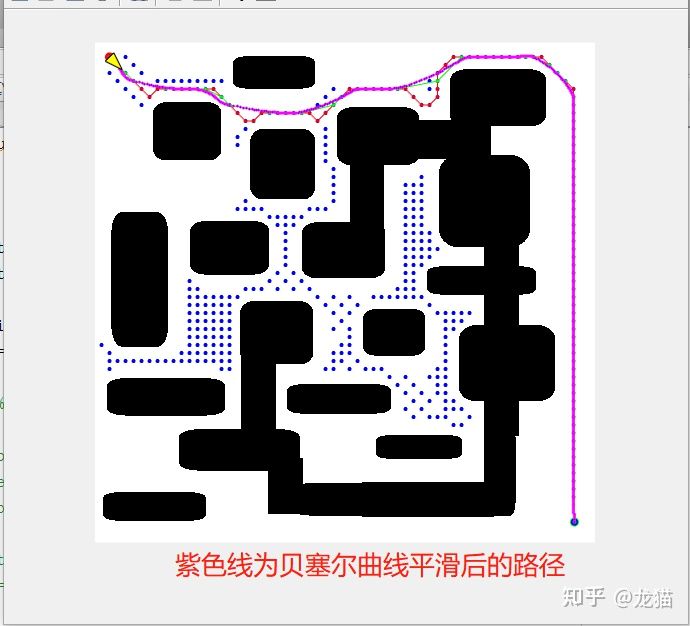
使用五阶贝塞尔优化路径
在优化了路径后,我们可以进一步使用贝塞尔曲线规划出一条更平滑的曲线:
增加运动轨迹模型
之后我们可以按照之前做RRT那样,增加速度S曲线的运动轨迹模型,最后的效果就是这样的:
A*算法+垂距限值法+贝塞尔+运动模型轨迹
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/542775
推荐阅读
相关标签

