
热门标签
热门文章
- 1高云1N1开发板高云gowin软件使用教程_高云封装兼容
- 2关于从git上拉下来的代码左下角有一个黄色的闹钟解决办法
- 3C#开源跨平台机器学习框架ML.NET----二元分类情绪分析
- 4技术前沿 |【SIMD并行计算与分布式算法:前沿技术的深度解析】
- 5银河麒麟V10操作系统 创建分区、创建lvm逻辑卷、格式化、挂载_银河麒麟格式化硬盘
- 6浮动时间怎么计算_自由浮动时间 VS 总浮动时间
- 72023北京市人工智能大模型场景融合与产业发展专场活动盛大召开
- 8OpenGL Shading Language_the opengl庐 shading language
- 9matlab 三维核密度图_python数据分布型图表直方图系列核密度估计图
- 1004.05 Linux系统用户与用户组_linux 床架你账号
当前位置: article > 正文
STM32F103定时器的PWM用法_stm32f103 pwm引脚
作者:weixin_40725706 | 2024-05-13 21:56:36
赞
踩
stm32f103 pwm引脚
STM32定时器用法
一、硬件资源简介
使用STM32F103ZET6核心板,此核心板主控芯片为LQFP144封装。STM32F103ZET6有8个定时器,其中TIM1,
TIM8为高级定时器,TMI2,TIM3,TIM4,TIM5为通用定时器,TIM6,TIM7为基本定时器。因为通用定时器的重映射
功能只能在100脚或144脚芯片使用,所以使用此型号,后续举例也以通用定时器功能为主。
- 1
- 2
- 3
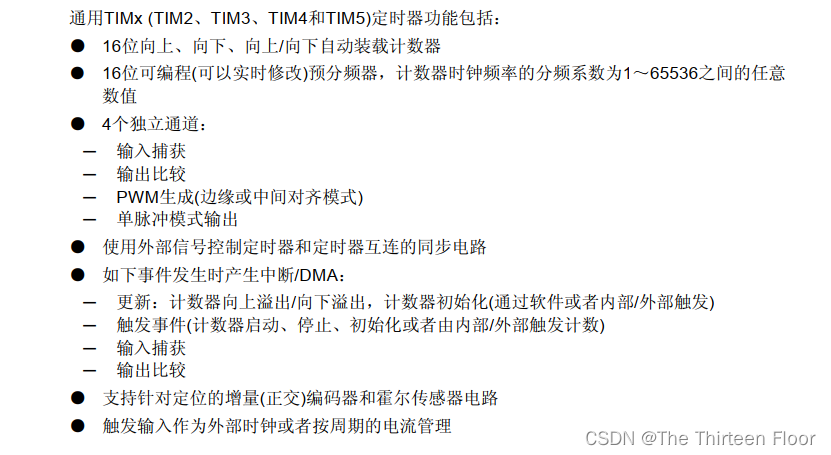
二、通用定时器功能简介
三、定时器设置步骤
1.GPIO设置并初始化;
2.定时器设置并初始化;
3.输出比较结构体设置并初始化;
- 1
- 2
- 3
四、功能实现
以PWM波为例实现两个功能:
1.四路频率,占空比可调的PWM波;
2.四路频率,相位差可调的PWM波;
PWM波频率 = 72M / (arr+1) / (pre+1) = 72M /(1000-1+1) /(72-1+1) = 1000Hz
(72M为系统默认频率)
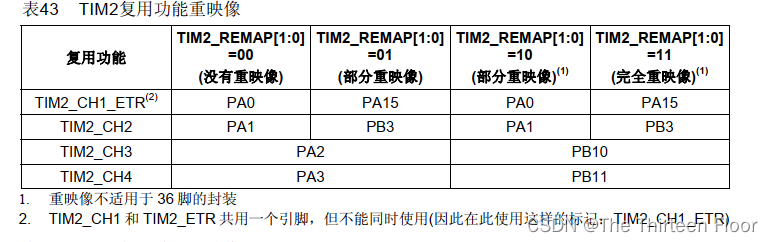
均采用TIM2的部分重映射2,一个定时器开启四个通道
- 1
- 2
- 3
- 4
- 5
- 6
- 7
五、代码与现象
1.四路频率,占空比可调的PWM波;
<1>具体代码
//四路频率,占空比可调的PWM波; #include "pwm.h" #include "stm32f10x.h" void TIM2_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure;//定义GPIO结构体 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义时基结构体 TIM_OCInitTypeDef TIM_OCInitStructure; //定义输出比较结构体 /*********************************************CH1*******************************************/ //使能GPIOA外设,使能复用功能 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO , ENABLE); //TIM2部分重映射2使能 GPIO_PinRemapConfig(GPIO_PartialRemap2_TIM2,ENABLE); //选择定时器2的CH1通道作为PWM波的输出引脚,TIM2-->PA0 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //TIM2_CH1 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;//带宽10MHz GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化结构体GPIOA //初始化定时器 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能定时器2 TIM_TimeBaseStructure.TIM_Period = arr; //自动重装载寄存器的值 TIM_TimeBaseStructure.TIM_Prescaler = psc; //预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //时钟分割 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);//定时器2结构体初始化 //设置TMI2_CH1的PWM模式,使能TMI2的CH1输出 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择PWM模式1 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //极性为高 TIM_OC1Init(TIM2, &TIM_OCInitStructure); //根据结构体初始化 TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能TIM2在CCR2上的预装值 /*********************************************CH2************************

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
推荐阅读
相关标签

