
热门标签
热门文章
- 1Java 开源中文分词器Ansj 学习教程_ansj分词依赖
- 2卡尔曼滤波获取MPU6050欧拉角_卡尔曼滤波mpu6050角度
- 3【HarmonyOS 4.0 应用开发实战】如何配置环境、创建并运行项目_鸿蒙设备开发环境配置教程
- 4php使用curl库进行ssl双向认证_curl 库 sslkeytype der
- 5Java 5个开源免费的项目_=开源 java项目
- 6设计模式在项目中的应用场景_项目中哪里用到设计模式
- 7Python爬虫入门教程30:爬取拉勾网招聘数据信息,Python校招面试指南_招聘网站 爬虫
- 806|ChatGPT来了,让我们快速做个AI应用_gr.chatbot() 复制
- 9SpringBoot整合MyBatis-Plus
- 10彻底禁止postman更新_postman 禁用更新 hosts 配置
当前位置: article > 正文
TDOA定位 chan算法和Taylor算法比较仿真 matlab_tdoa和泰勒是一个吗
作者:weixin_40725706 | 2024-05-22 08:41:04
赞
踩
tdoa和泰勒是一个吗
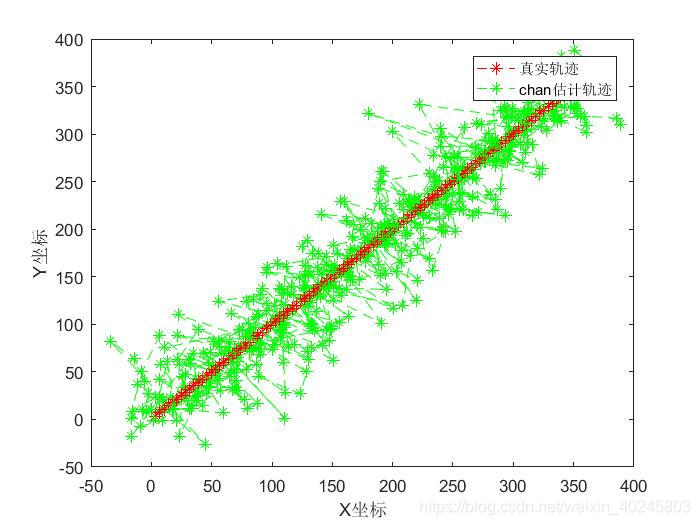
最近在学习TDOA定位算法,需要比较chan(查恩算法)和Taylor(泰勒级数算法)的定位效果。
分别实现的效果图:

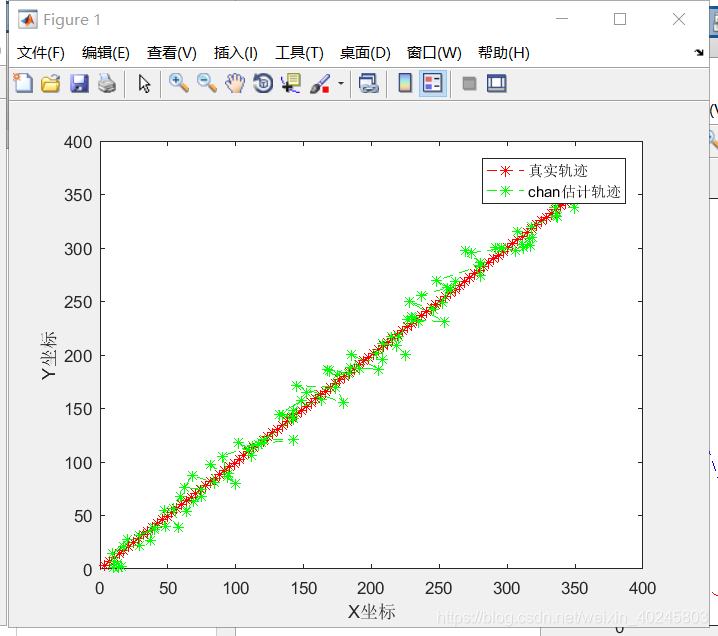
运动目标从零点开始沿x=y做匀速运动。
观测站坐标如下:

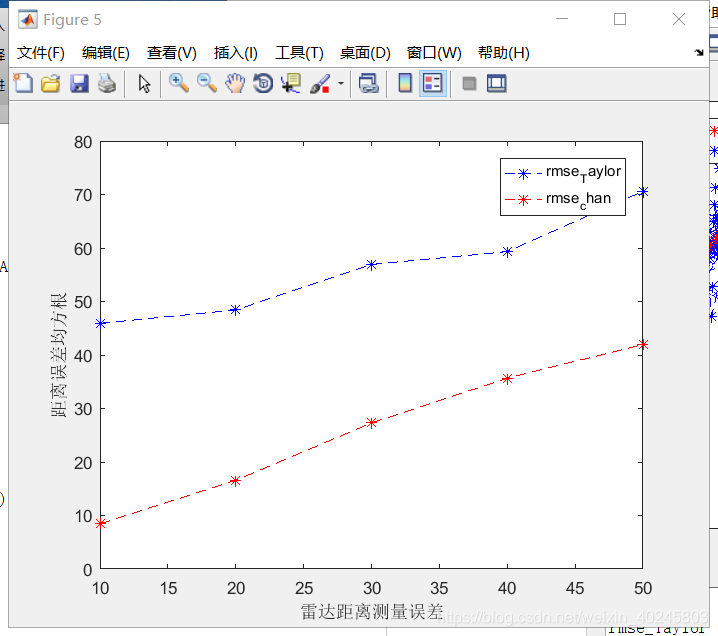
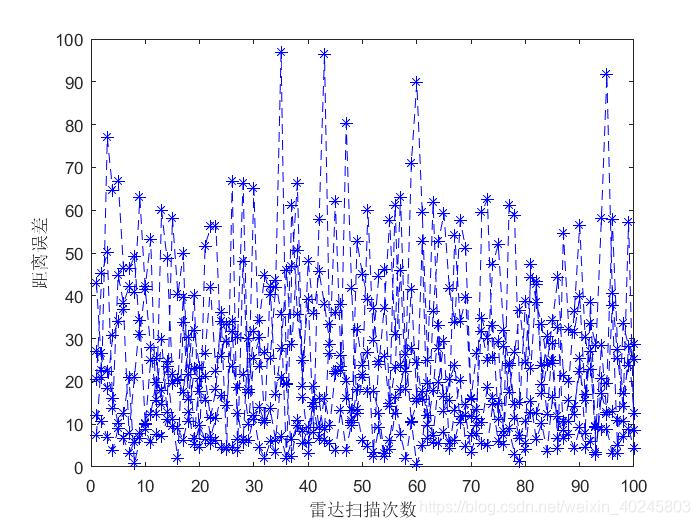
在不同的雷达测距误差下的定位误差为:
其实仿真代码还有不足,Taylor算法初值的确定非常重要,仿真中直接把真实值作为了初值,实际上需要改为第一次LS定位点或WLS定位点,比较符合真实情况。
不过,到此已经能比较明显的比较出两种算法的不同之处了。
需要源码的同学可以到我的主页下载
感谢 Iam_Flash的提问,上传程序中chan算法的pos应在第二次WLS定位中选择,由于参考基站的位置会影响第二次WLS的求解结果,所以建议把参考基站设置为(0,0),保证待测目标出现在以参考基站为原点的第一象限上,保证第二次求解WLS不会出现虚数。当然也可以对WLS出现虚数的值进行处理还原出估计值。
未修改参考基站的坐标,直接改chan的pos,会出现如下情况:
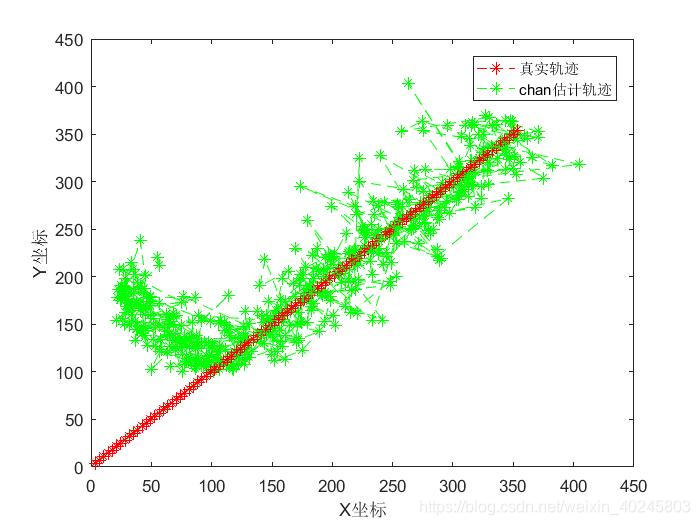
求解出虚数的结果被滤除。
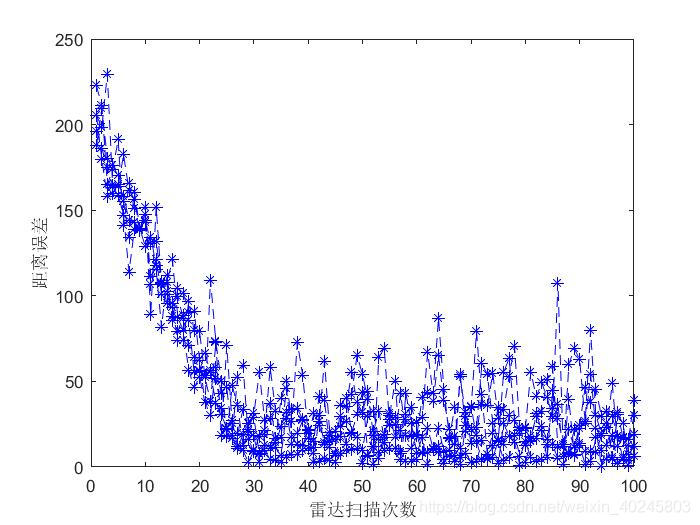
修改参考坐标后,将参考基站坐标改为(-100,-100)
function [rmse_c,rmse_T] = TDOAchan_Taylor_comparise(noise) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 设置基站信息 % delta TDOA测量误差的标准差,用于产生Q矩阵 % M 参考基站外的基站数量 % Xb = -100;Yb = -100; %参考的基站坐标 % c 光速 % X 参考基站的坐标 % T: 雷达的扫描间隔,此时设为1秒 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% delta = noise; M=4; Xb = -100;Yb =-100;%参考的基站坐标 c=3e8; X = zeros(M,2); T = 1; %生成其他基站的坐标 a = 2*pi/M; for i=1:M X(i,1) = 3000*cos(a*(i-1)); X(i,2) = 3000*sin(a*(i-1)); end

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
重新输出结果:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/607435
推荐阅读
相关标签

