
- 1java毕业设计少儿编程教育网站系统mybatis+源码+调试部署+系统+数据库+lw_少儿编程开源系统
- 2Redis底层数据结构详解(一)_redis ziplist 中的字符串是sds吗
- 3STM32 入门教程(江科大教材)#笔记1
- 4[STM32U5]【NUCLEO-U575ZI-Q测评】使用轻量级AI推理框架TinyMaix实现手写数字识别_tinyml可以在任何单片机上用吗
- 5代码随想录算法训练营第十五天 | 层序遍历 226.翻转二叉树 101.对称二叉树 2
- 6『哈哥赠书 - 53期』-『深入浅出 Spring Boot 3.x』_深入浅出spring boot 3.x pdf
- 72024年网安最新网络安全入门书籍推荐
- 8ubuntu wordpress建站
- 9raid和lvm_lvm lvconvert --type mirror与raid1的区别与联系
- 10uniapp 中 component 组件的生命周期(钩子函数)_unicomponent
Mobile ALOHA:低成本遥操作双臂移动机器人_mobile aloha: learning bimanual mobile manipulatio
赞
踩
这篇文章的标题是《Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation》,作者是Zipeng Fu、Tony Z. Zhao和Chelsea Finn,来自斯坦福大学。
一、主要贡献
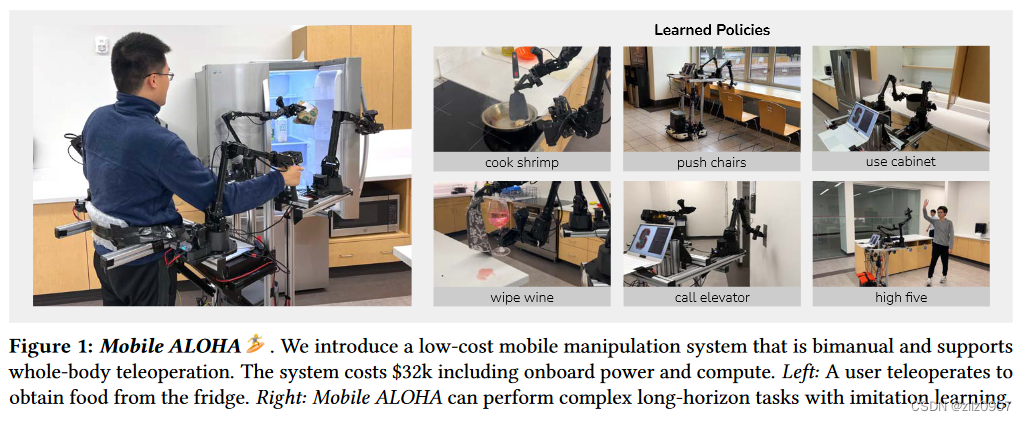
Mobile ALOHA是一个低成本的移动操作系统,该系统支持双手操作和全身遥操作。系统总成本为32,000美元,包括机载电源和计算能力。
文章中提到了通过模仿学习从人类演示中获取的机器人性能表现,但大多数结果集中在桌面操作上,缺乏执行通用任务所需的移动性和灵活性。本文开发了一个系统,用于模仿需要双手和全身控制的移动操作任务。它通过移动基座和全身遥操作界面扩展了ALOHA系统。使用Mobile ALOHA收集的数据,然后进行监督行为克隆,并发现与现有的静态ALOHA数据集共同训练可以提高移动操作任务的性能。通过为每项任务提供50个演示,共同训练可以将成功率提高至90%,使Mobile ALOHA能够自主完成复杂的移动操作任务,如炒虾和上菜、打开双门墙柜以存放重型烹饪锅具、呼叫并进入电梯,以及使用厨房水龙头轻轻冲洗使用过的平底锅。
文章还讨论了移动操作系统的设计考虑因素,包括移动性、稳定性、全身遥操作和无束缚。
文章还提到了通过与静态ALOHA数据共同训练来提高性能的方法,以及使用不同的模仿学习方法(包括ACT、Diffusion Policy和VINN)在Mobile ALOHA上的应用。此外,还进行了用户研究,评估了Mobile ALOHA遥操作的有效性,特别是评估参与者学习操作未见过任务的速度。
二、硬件配置
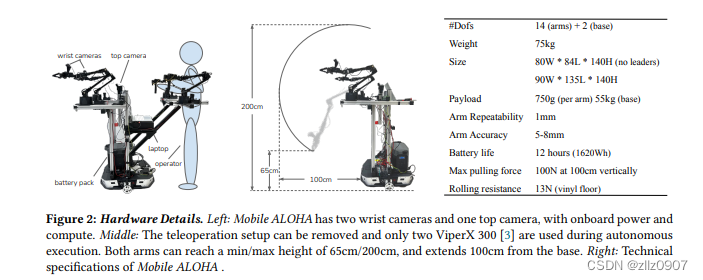
选择了AgileX Tracer AGV作为移动基座,并设计了一个全身遥操作系统,允许同时控制基座和两个手臂。为了使移动操作器无束缚,在基座上放置了一个1.26千瓦时的电池,重量为14公斤,它也作为平衡重量以避免翻倒。
所有数据收集和推理计算都在配备Nvidia 3070 Ti GPU(8GB VRAM)和Intel i7-12800H的消费级笔记本电脑上进行。
笔记本电脑接受来自三个Logitech C922x RGB网络摄像头的流媒体,分辨率为480x640,频率为50Hz。两个摄像头安装在跟随机器人的手腕上,第三个面向前方。笔记本电脑还通过USB串行端口接受所有4个手臂的本体感知流,并通过CAN总线接受Tracer移动基座的流媒体。记录移动基座的线性和角速度,以用作学习策略的行动。同时记录所有4个机器人手臂的关节位置,用作策略的观察和行动。更多关于手臂的细节可以参考原始的ALOHA论文。
三、模型训练
1. 数据收集:Mobile ALOHA系统通过全身遥操作界面收集数据,这包括基座的速度数据和手臂操纵数据。这些数据被记录以形成一个全身遥操作系统。
2. 数据格式:在模仿学习部分,文章提到了将ALOHA的14个自由度关节位置与移动基座的线性和角速度结合起来,形成一个16维的动作向量。这种形式使得Mobile ALOHA能够直接从以前的深度模仿学习算法中受益,几乎不需要改变实现。
3. 训练输入:对于移动操作策略的训练,输入包括两个手腕摄像头的RGB观察值、安装在两个手臂之间的顶向摄像头的RGB观察值,以及手臂的关节位置。输出则是基于这些观察值的动作向量。
4. 训练目标:训练目标是最小化模仿损失函数,其中包含了从Mobile ALOHA数据集中采样的观察值和动作,以及从静态ALOHA数据集中采样的观察值和零填充的动作标签。
5. 共同训练:文章中还提到了使用共同训练(co-training)的方法,结合了Mobile ALOHA数据集(针对特定任务的数据)和静态ALOHA数据集(不包含移动基座动作的数据)。这种共同训练的方法提高了移动操作策略的性能和数据效率。
6. 动作块:所有检查的方法都采用了“动作块”(action chunking),即策略预测一系列未来动作而不是每个时间步一个动作。这提高了生成轨迹的连贯性,并减少了由于每步策略推断而产生的延迟。
7. 数据集的多样性:文章还讨论了使用不同的数据集混合比例进行共同训练的鲁棒性,发现性能对不同的数据混合比例不敏感,这减少了在新任务上引入共同训练时的手动调整需求。

