
- 1uiautomator2+雷电模拟器_uiautomator2 雷电
- 2使用quartus13.0烧录文件_quartus烧录
- 32019汇智动力学院课程、服务体系震撼升级_汇智动力教学视频地址
- 42024中青杯数学建模ABC题完整思路+代码+参考论文分享_近期数学建模比赛助攻汇总《2024中青杯数学建模思路代码论文助攻(复制链接到
- 5【Eclipse】安装与卸载教程_如何卸载eclipse重新安装
- 6ajax请求可以在后端跳转到其他页面吗_Spring Boot2 系列教程(三十八)Spring Security 非法请求直接返回 JSON...
- 7Science Advances:社会和健康科学中用于描述、预测和因果推理的机器学习方法_寻找与目标变量具有相关性的因子作为输入变量进行预测的外文文献
- 8用HAL库改写江科大的stm32入门例子-补充DHT11_江科大 hal
- 9PHP上传文件失败_upload failed: check that the file name doesn鈥檛 co
- 10【Python】模块导入 ② ( 模块导入语法 | 导入完整模块 | import 导入完整模块 | from 导入完整模块 )_from import导入模块
ros2机器人foxy版用笔记本摄像头跑单目orb_slam3_ros2 orb-slam3
赞
踩
环境:
Ubuntu 20.04
ROS2 foxy
OpenCV 4.4.0(4版本以上的应该都可以)
安装orb_slam3 搭建环境参考:
https://mp.csdn.net/mp_blog/creation/editor/129137521
- git clone https://github.com/zang09/ORB-SLAM3-STEREO-FIXED.git ORB_SLAM3
- cd ORB_SLAM3
- chmod +x build.sh
- ./build.sh
这将在lib文件夹中创建libORB_SLAM3.so,只需要安装到这一步,生成 libORB_SLAM3.so 动态库即可。后面的ros程序安装是ros1的,ros1早晚会被ros2替代的,所以后面的ros程序我们就不在安装了。
安装ros2 foxy版orb_slam3程序:
安装相关的ROS2软件包:
sudo apt install ros-$ROS_DISTRO-message-filters安装orb_slam3_ros2
- mkdir -p colcon_ws/src
- cd ~/colcon_ws/src
- git clone https://github.com/zang09/ORB_SLAM3_ROS2.git orbslam3_ros2
按自己的目录结构修改CMakeLists.txt 第五行
set(ENV{PYTHONPATH} "/opt/ros/foxy/lib/python3.8/site-packages/")
修改 FindORB_SLAM3.cmake 第八行为自己的ORB_SLAM3路径,比如我的:
set(ORB_SLAM3_ROOT_DIR "~/ORB_SLAM3")
编译:
- cd ~/colcon_ws
- colcon build --symlink-install --packages-select orbslam3
编译报错找不到sophus/se3.hpp:
cd ~/ORB_SLAM3/Thirdparty/Sophus/build
sudo make install
重新编译直至成功。
安装笔记本摄像头驱动:
sudo apt install ros-foxy-usb-cam //foxy安装摄像头驱动
ros2 run usb_cam usb_cam_node_exe //启动摄像头节点
查看摄像头话题:ros2 topic list
/camera_info
/image_raw
/image_raw/compressed
/image_raw/compressedDepth
/image_raw/theora
/parameter_events
/rosout
摄像头发布话题为 : /image_raw
和程序里面的接收话题不一样,需要修改程序内的接收话题名与摄像头发布话题名一致
修改 monocular-slam-node.cpp
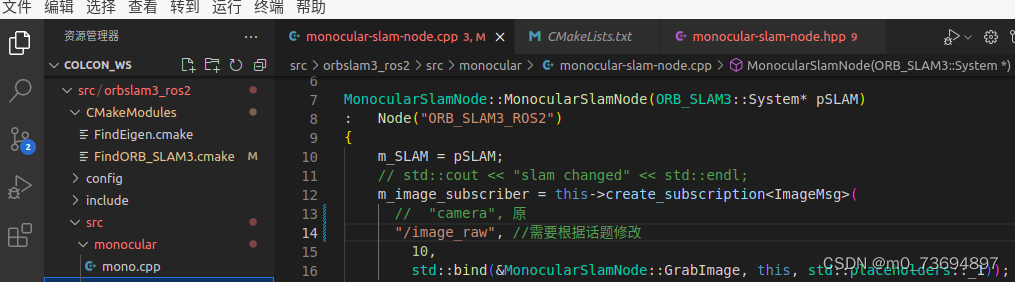
修改好话题后要重新编译。
运行程序:
1. 打开终端开启摄像头节点
ros2 run usb_cam usb_cam_node_exe
2. 重新打开一个终端开启单目orbslam3程序
source ~/colcon_ws/install/local_setup.bash
ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
上面命令是ros主程序+ ORBvoc.txt + RealSense_D435i.yaml (摄像头配置文件任意选一个就行)路径需要按自己电脑实际路径修改。
可能我的笔记本配置低,需要等待十几秒才能看到图像
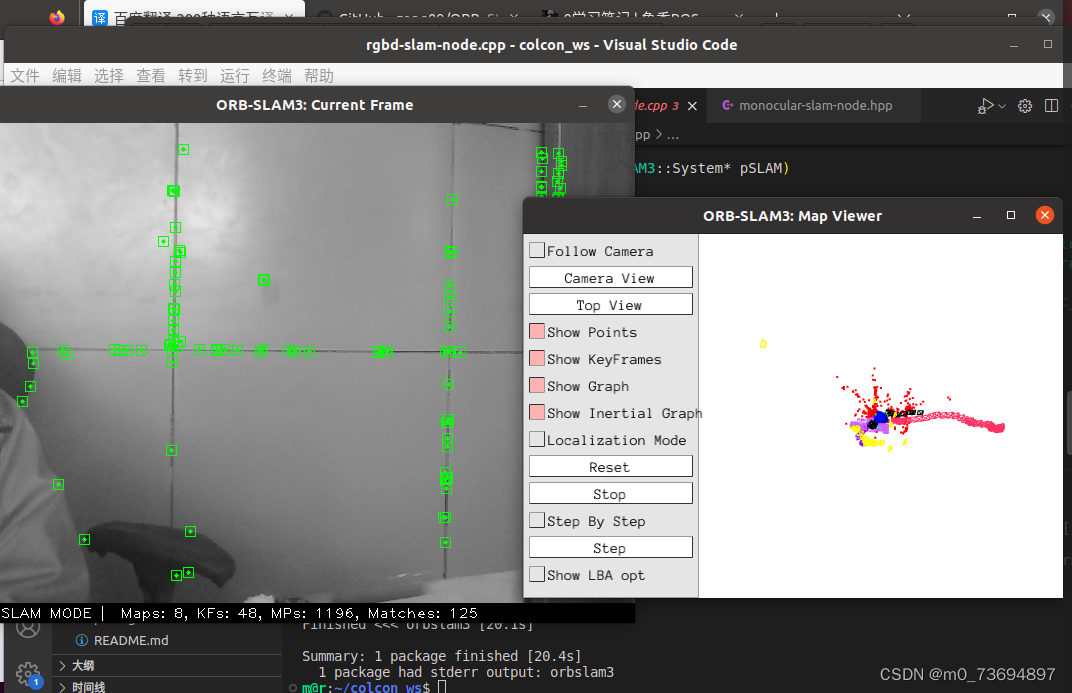
看到图像说明程序正常运行了,如果只是一个黑框出不来图像,移动一下笔记本,跑单目静止画面有时出不来图像。
我们这里的目的是跑通程序,真正要让程序运行好还需要给摄像头做标定。
参考网址:
GitHub - zang09/ORB-SLAM3-STEREO-FIXED: Fixed version of ORB-SLAM3 stereo mode
GitHub - zang09/ORB_SLAM3_ROS2: ROS2 wrapping package for orbslam3 library

