
热门标签
热门文章
- 1GitHub开源项目
- 2STM32的串口FIFO发送和接收使用FreeRTOS实时操作系统_stm32 freertos 串口
- 3蒙特卡洛树搜索 棋_蒙特卡罗树搜索赢得黑白棋
- 4用python绘制玫瑰花的代码_python也能玩出玫瑰花!程序员的表白代码
- 5PAT甲级题目索引(题目+解析+AC代码)_pat甲级真题
- 6socket实现简单的网络聊天服务器和客户端(UDP)_socket udpserver
- 7YOLOV5 + PYQT5单目测距(四)_实现yolo和单目测距
- 8基于Spring Cloud Gateway
- 9HTML5 MathML用法详解
- 10JS数据结构——Set(集合)详解_js set
当前位置: article > 正文
【ROS2机器人入门到实战】第 十四 章 接入ROS2-MicroROS
作者:weixin_40725706 | 2024-06-02 05:05:13
赞
踩
microros
第 十四 章 接入ROS2-MicroROS
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
,我是小鱼。上一章我们通过对嵌入式开发的学习,了解了如果通过代码来和硬件打交道,但如果你想拥抱ROS的强大生态,还需要把我们的硬件系接入到ROS中来,MicroROS就是帮你完成这一事情的一大利器。所以本章的重点就是带你一起学习MicroROS的使用。
- 基础篇,如果你不了解MicroROS,不知道如何安装以及启动,那么建议你从基础篇开始。
- 入门篇,主要介绍使用MicroROS实现话题的订阅与发布,以及服务通信的实现。
- 进阶篇,通过对MicroROS配置以及开发中常用点的介绍,带你深入了解MicroROS。
友情提示:和我们课程的名称一样,本教程中所有代码都非常建议跟着敲一遍,不要直接复制粘贴,写了才是自己的。
硬件开发平台
为方便学习,本教程配套的硬件是小鱼自制的MicroROS学习板,同时该板可以作为下一章节搭建实体移动机器人的主控板以及后续制作机械臂的驱动板使用。
板载资源图如下:
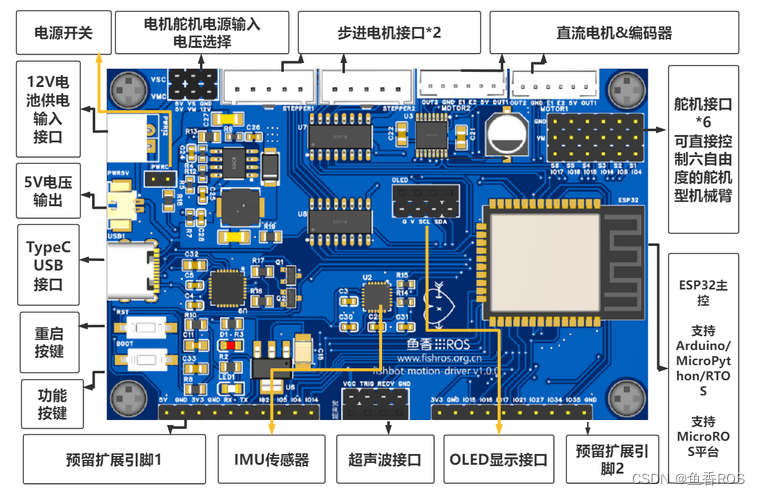
该主控板可以在小鱼的店铺直接购买,性价比接地气,直达链接:https://item.taobao.com/item.htm?id=695473143304。
同时该板的原理图和PCB小鱼都已经开源了,时间充足且动手能力强工具齐全的的小伙伴可以自己购买元器件制作,开源地址见鱼香ROS社区:https://www.fishros.org.cn/forum/topic/894
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/661236
推荐阅读
相关标签

