
- 1[大模型]DeepSeek-MoE-16b-chat Transformers 部署调用_deepseek本地部署
- 2浅谈驱动开发_驱动开发是干什么的
- 3AVM 环视拼接方法介绍_avm拼接算法
- 4鸿蒙OpenHarmony【轻量系统 编译】 (基于Hi3861开发板)_openharmony hb
- 5Android 中的动态应用程序图标_android 动态更新icon
- 6概率模拟(sigmoid、softmax)
- 7开源机器学习模型管理工具DVC介绍_算法模型版本管理服务
- 8十分钟带你认识大模型和生成式AI和其常见误解_生成式ai与大模型
- 9GO语言与C++语言的区别主要体现在什么地方?可以举个简单的例子说明吗?
- 10ROS2从入门到精通5-1:详解代价地图与costmap插件编写(以距离场ESDF为例)_ros costmap
ROS2——URDF机器人建模(十六)_人形机器人urdf下载
赞
踩
ROS2机器人操作系统
前言
ROS专门提供了一种机器人建模方法——URDF,用来描述机器人外观、性能等各方面属性。建模描述机器人的过程中,我们自己需要先熟悉机器人的组成和参数,比如机器人一般是由硬件结构、驱动系统、传感器系统、控制系统四大部分组成,市面上一些常见的机器人,无论是移动机器人还是机械臂,我们都可以按照这四大组成部分进行分解。
一、什么是URDF

ROS中的建模方法叫做URDF,全称是统一机器人描述格式,不仅可以清晰描述机器人自身的模型,还可以描述机器人的外部环境,比如这里的桌子,也可以算作一个模型。

URDF模型文件使用的是XML格式,右侧就是一个机器人的URDF描述,乍看上去,有点像网页开发的源代码,都是由一系列尖括号包围的标签和其中的属性组合而成。
在建模中,大臂和小臂就类似机器人的这些独立的刚体部分,称为连杆Link,手肘就类似于机器人电机驱动部分,称为关节joint。
所以在URDF建模过程中,关键任务就是通过这里的和,理清楚每一个连杆和关节的描述信息。
连杆Link的描述
标签用来描述机器人某个刚体部分的外观和物理属性,外观包括尺寸、颜色、形状,物理属性包括质量、惯性矩阵、碰撞参数等。 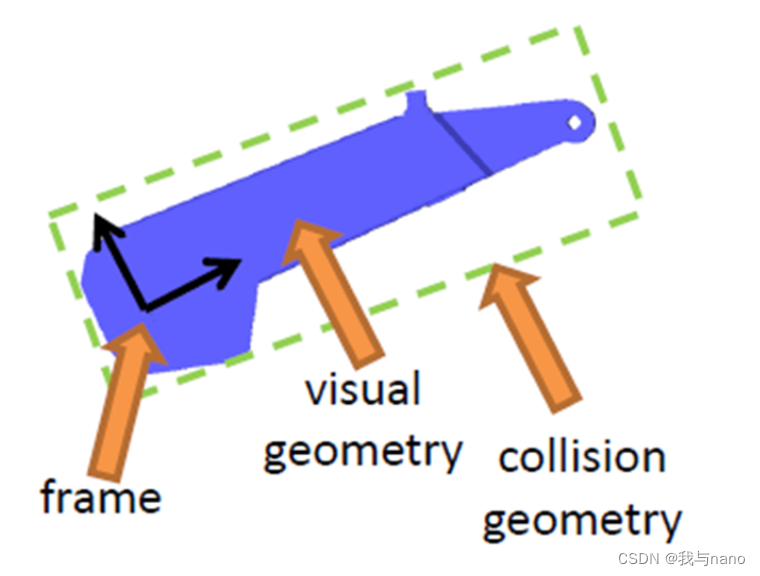 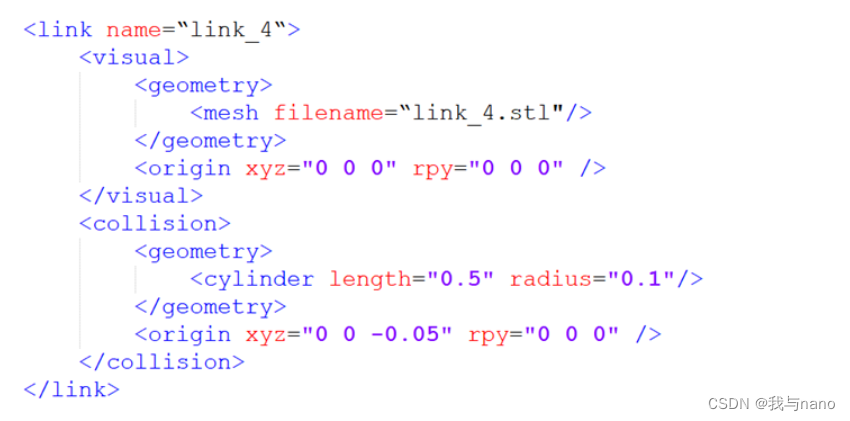 link标签中的name表示该连杆的名称,我们可以自定义,未来joint连接link的时候,会使用到这个名称。link里边的部分用来描述机器人的外观,比如:
表示几何形状,里边使用调用了一个在三维软件中提前设计好的蓝色外观,就是这个stl文件,看上去和真实机器人是一致的
表示坐标系相对初始位置的偏移,分别是x、y、z方向上的平移,和roll、pitch、raw旋转,不需要偏移的话,就全为0。
第二个部分,描述碰撞参数,里边的内容似乎和一样,也有和,看似相同,其实区别还是比较大的。
部分重在描述机器人看上去的状态,也就是视觉效果;
部分则是描述机器人运动过程中的状态,比如机器人与外界如何接触算作碰撞。
在这个机器人模型中,蓝色部分是通过来描述的,在实际控制过程中,这样复杂的外观在计算碰撞检测时,要求的算力较高,为了简化计算,我们将碰撞检测用的模型简化为了绿色框的圆柱体,也就是里边描述的形状。坐标系偏移也是类似,可以描述刚体质心的偏移。

关节Joint描述
机器人模型中的刚体最终要通过关节joint连接之后,才能产生相对运动。
URDF中的关节有六种运动类型。

continuous,描述旋转运动,可以围绕某一个轴无限旋转,比如小车的轮子,就属于这种类型。
revolute,也是旋转关节,和continuous类型的区别在于不能无限旋转,而是带有角度限制,比如机械臂的两个连杆,就属于这种运动。
prismatic,是滑动关节,可以沿某一个轴平移,也带有位置的极限,一般直线电机就是这种运动方式。
fixed,固定关节,是唯一一种不允许运动的关节,不过使用还是比较频繁的,比如相机这个连杆,安装在机器人上,相对位置是不会变化的,此时使用的连接方式就是Fixed。
Floating是浮动关节,第六种planar是平面关节,这两种使用相对较少。

在URDF模型中,每一个link都使用这样一段xml内容描述,比如关节的名字叫什么,运动类型是哪一种。

parent标签:描述父连杆;
child标签:描述子连杆,子连杆会相对父连杆发生运动;
origin:表示两个连杆坐标系之间的关系,也就是图中红色的向量,可以理解为这两个连杆该如何安装到一起;
axis表示关节运动轴的单位向量,比如z等于1,就表示这个旋转运动是围绕z轴的正方向进行的;
limit就表示运动的一些限制了,比如最小位置,最大位置,和最大速度等。

完整机器人模型

最终所有的link和joint标签完成了对机器人每个部分的描述和组合,全都放在一个robot标签中,就形成了完整的机器人模型。
二、创建一个机器人
1.功能包的结构

urdf:存放机器人模型的URDF或xacro文件
meshes:放置URDF中引用的模型渲染文件
launch:保存相关启动文件
rviz:保存rviz的配置文件
$ ros2 launch learning_urdf display.launch.py
- 1

2.查看URDF模型结构
$ urdf_to_graphviz mbot_base.urdf # 在模型文件夹下运行
- 1
运行成功后会产生一个pdf文件,打开之后就可以看到URDF模型分析的结果

3.模型文件解析
<?xml version="1.0" ?> <robot name="mbot"> <link name="base_link"> <visual> <origin xyz=" 0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.16" radius="0.20"/> </geometry> <material name="yellow"> <color rgba="1 0.4 0 1"/> </material> </visual> </link> <joint name="left_wheel_joint" type="continuous"> <origin xyz="0 0.19 -0.05" rpy="0 0 0"/> <parent link="base_link"/> <child link="left_wheel_link"/> <axis xyz="0 1 0"/> </joint> <link name="left_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0" /> <geometry> <cylinder radius="0.06" length = "0.025"/> </geometry> <material name="white"> <color rgba="1 1 1 0.9"/> </material> </visual> </link> <joint name="right_wheel_joint" type="continuous"> <origin xyz="0 -0.19 -0.05" rpy="0 0 0"/> <parent link="base_link"/> <child link="right_wheel_link"/> <axis xyz="0 1 0"/> </joint> <link name="right_wheel_link"> <visual> <origin xyz="0 0 0" rpy="1.5707 0 0" /> <geometry> <cylinder radius="0.06" length = "0.025"/> </geometry> <material name="white"> <color rgba="1 1 1 0.9"/> </material> </visual> </link> <joint name="front_caster_joint" type="continuous"> <origin xyz="0.18 0 -0.095" rpy="0 0 0"/> <parent link="base_link"/> <child link="front_caster_link"/> <axis xyz="0 1 0"/> </joint> <link name="front_caster_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <sphere radius="0.015" /> </geometry> <material name="black"> <color rgba="0 0 0 0.95"/> </material> </visual> </link> <joint name="back_caster_joint" type="continuous"> <origin xyz="-0.18 0 -0.095" rpy="0 0 0"/> <parent link="base_link"/> <child link="back_caster_link"/> <axis xyz="0 1 0"/> </joint> <link name="back_caster_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <sphere radius="0.015" /> </geometry> <material name="black"> <color rgba="0 0 0 0.95"/> </material> </visual> </link> </robot>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93

