
- 1udhcpd简单配置_udhcpd 配置
- 2堆的数据结构以及堆的相应操作
- 3无线通信基本原理_无线通信原理
- 4访问CentOS7光盘_centos7怎么打开光盘命令
- 5《UE5_C++多人TPS完整教程》学习笔记2 ——《P3 多人游戏概念(Multiplayer Concept)》
- 6chatgpt赋能python:用Python进行股票分析_用chatgpt写股票分析报告
- 7机器学习笔记 - 深度学习在网球运动分析上的应用_ibm slamtracker
- 8vue3 中Element Plus的el-select 样式(包括更换小图标样式)_vue
- 9使用python实现跨年烟花代码_python跨年代码
- 10大语言模型介绍(一)
人形机器人专题:准直驱执行器深度:人形机器人执行器技术的前沿
赞
踩
今天分享的是人形机器人系列深度研究报告:《人形机器人专题:准直驱执行器深度:人形机器人执行器技术的前沿》。
(报告出品方:招商证券)
报告共计:34页
准直驱执行器具备独特优势
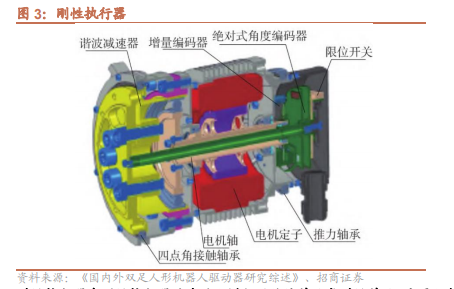
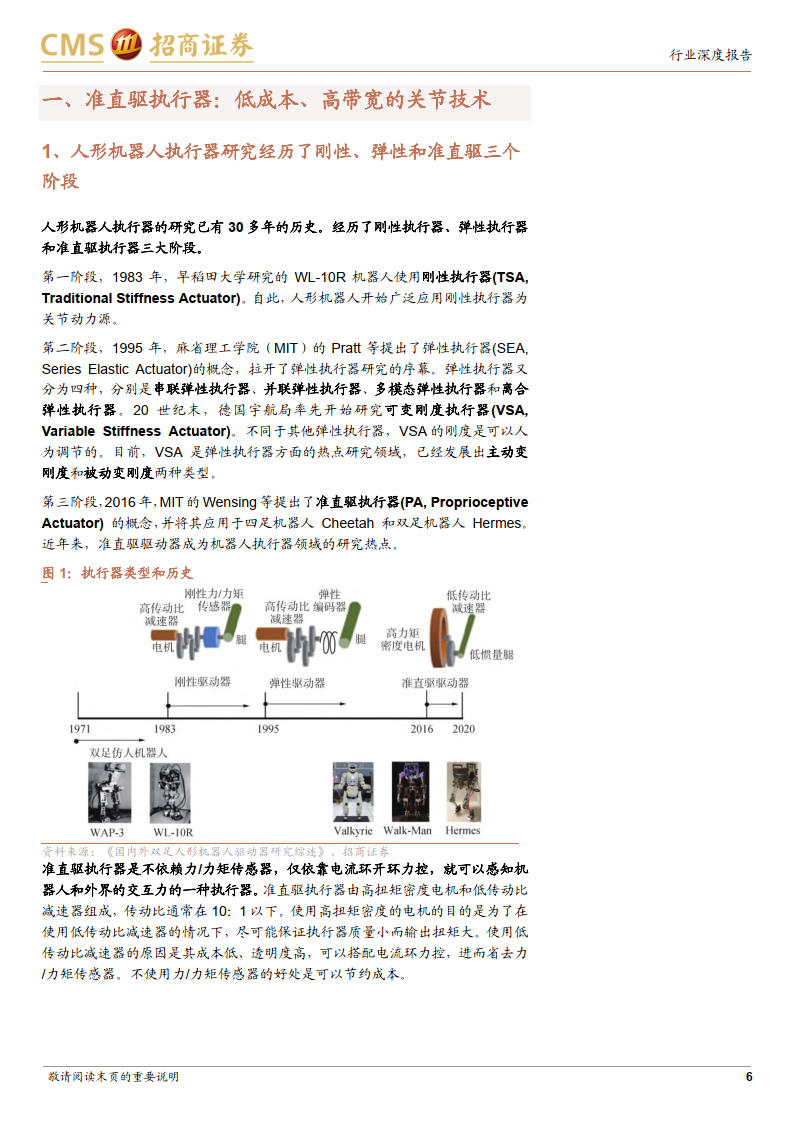
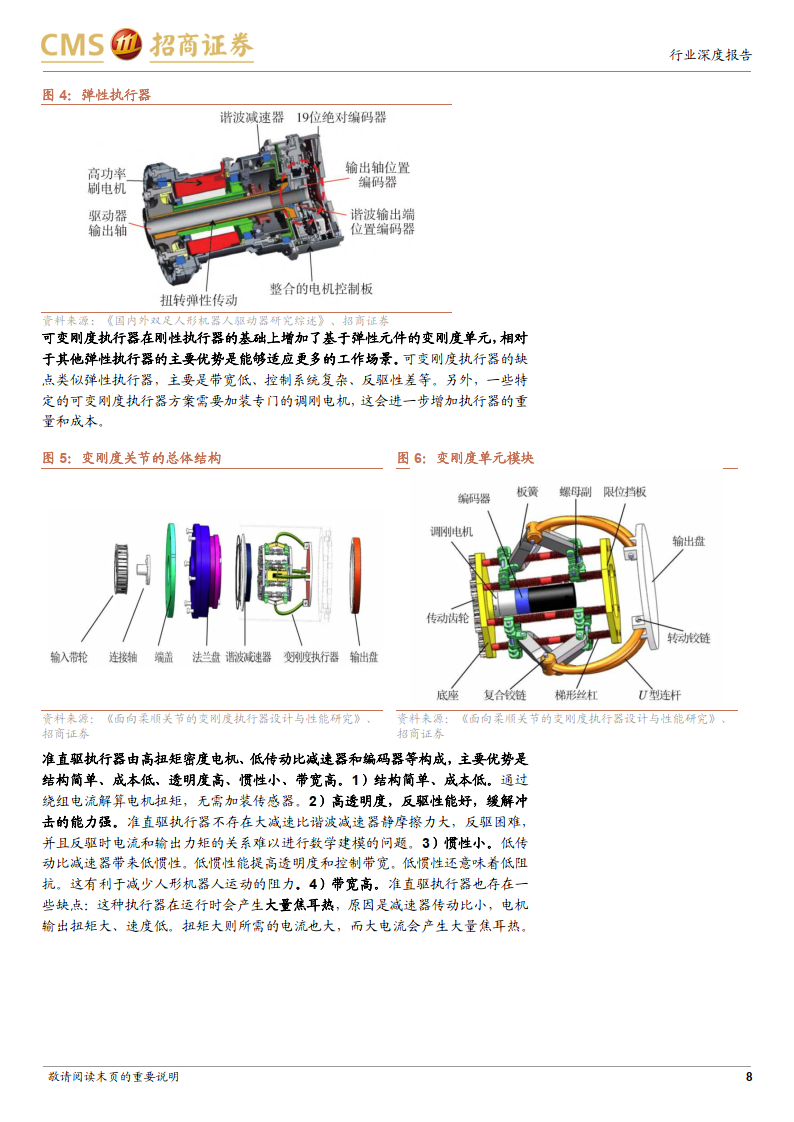
刚性执行器由电机、高传动比减速器、编码器、力矩传感器和控制板等组成,主 要优势是力量控制精准。但是,刚性执行器运动速度普遍较低,爆发力不足,受 外部冲击时零部件易受损。刚性执行器的控制方法以位置控制为主,虽然能使机 器人精确跟踪期望轨迹,但也给使用者带来安全隐患。因此,刚性执行器适用于定义明确且不需要与人类直接物理交互的环境,如零件加工、机械装配等工业领域。这些应用需要较高的位置精度和重复精度。
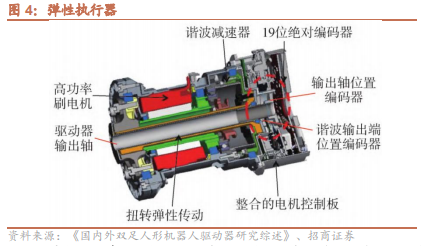
弹性执行器在刚性执行器的基础上增加了收缩单元或弹性单元,主要优势是顺应 性强。但是,弹性执行器也有许多缺点。1)带宽低。弹性部件对高频运动的响 应性差,导致带宽低、动态性能差,无法应对快速变化的工况,并且需要更加复杂的控制系统。过低的带宽会限制驱动器方案的适用范围。2)控制难。建立弹性执行器的精确模型非常困难,这使精细控制难以实施。3)弹性单元的制造成本高。4)增加额外重量。
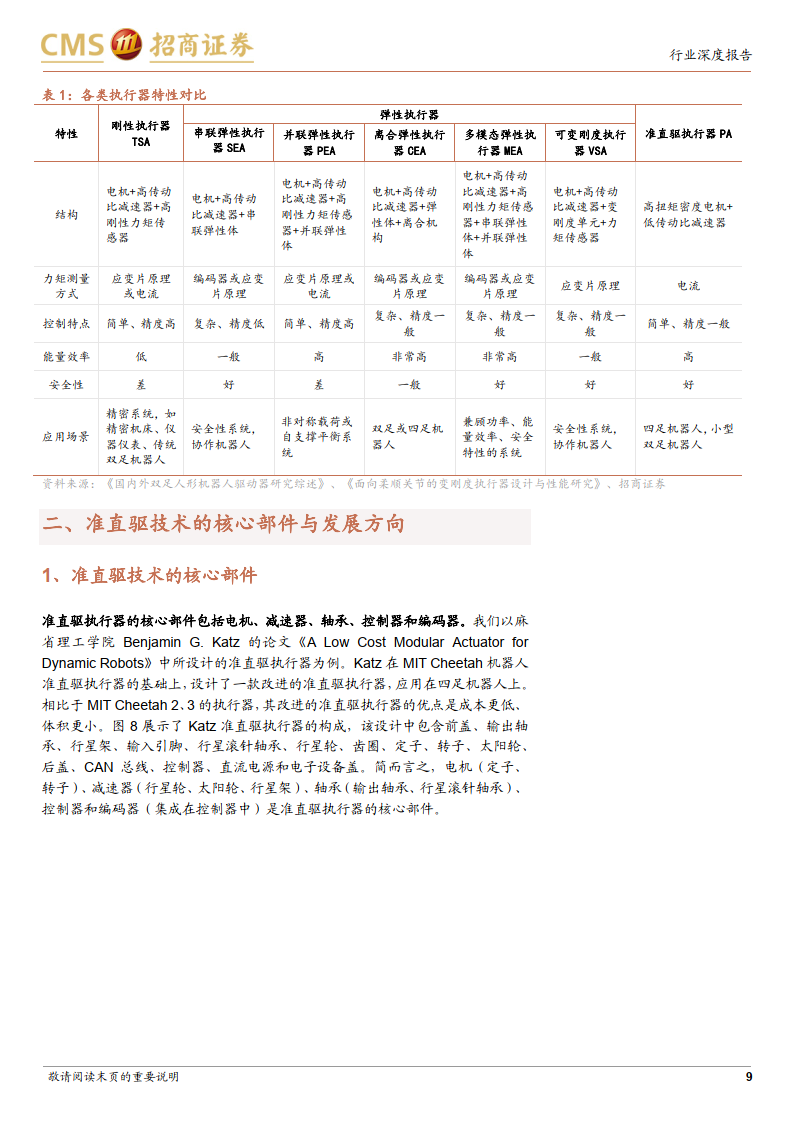
可变刚度执行器在刚性执行器的基础上增加了基于弹性元件的变刚度单元,相对 于其他弹性执行器的主要优势是能够适应更多的工作场景。可变刚度执行器的缺 点类似弹性执行器,主要是带宽低、控制系统复杂、反驱性差等。另外,一些特定的可变刚度执行器方案需要加装专门的调刚电机,这会进一步增加执行器的重 量和成本。

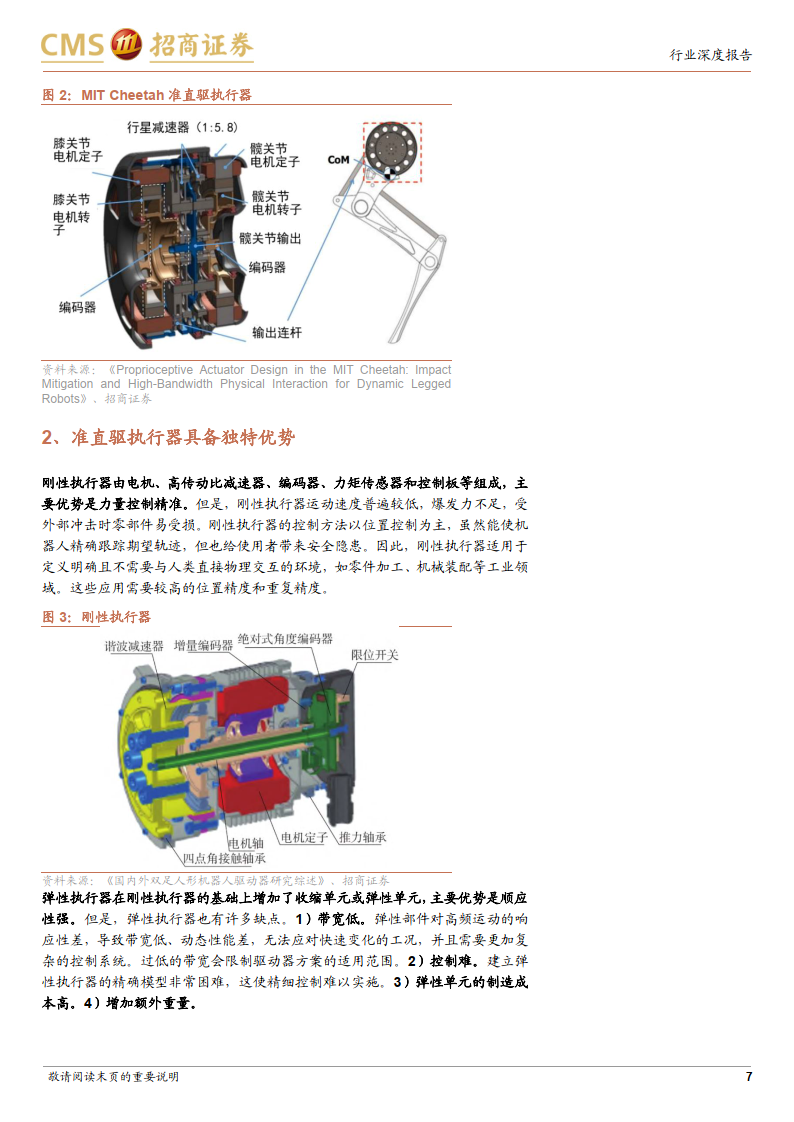
准直驱执行器由高扭矩密度电机、低传动比减速器和编码器等构成,主要优势是 结构简单、成本低、透明度高、惯性小、带宽高。1)结构简单、成本低。通过 绕组电流解算电机扭矩,无需加装传感器。2)高透明度,反驱性能好,缓解冲 击的能力强。准直驱执行器不存在大减速比谐波减速器静摩擦力大,反驱困难, 并且反驱时电流和输出力矩的关系难以进行数学建模的问题。3)惯性小。低传 动比减速器带来低惯性。低惯性能提高透明度和控制带宽。低惯性还意味着低阻抗。这有利于减少人形机器人运动的阻力。4)带宽高。准直驱执行器也存在一 些缺点:这种执行器在运行时会产生大量焦耳热,原因是减速器传动比小,电机 输出扭矩大、速度低。扭矩大则所需的电流也大,而大电流会产生大量焦耳热。
准直驱技术的核心部件
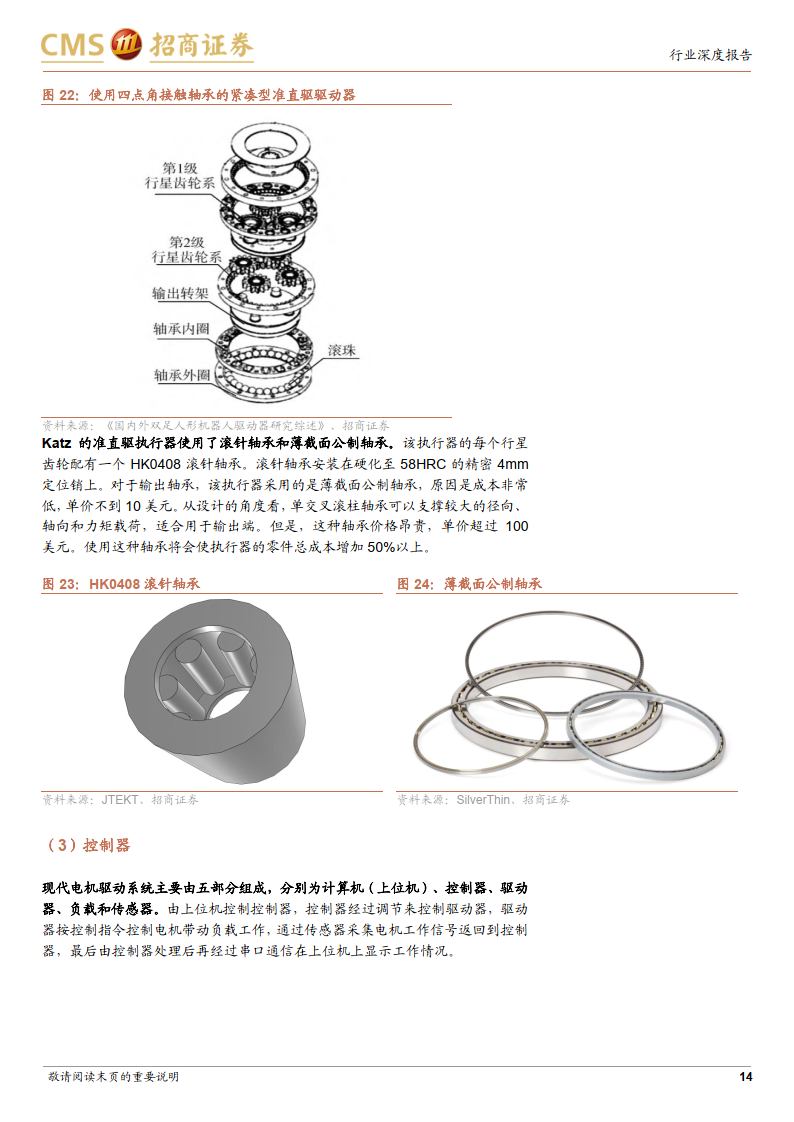
准直驱执行器的核心部件包括电机、减速器、轴承、控制器和编码器。我们以麻 省理工学院 Benjamin G. Katz 的论文《A Low Cost Modular Actuator for Dynamic Robots》中所设计的准直驱执行器为例。Katz 在 MIT Cheetah 机器人 准直驱执行器的基础上,设计了一款改进的准直驱执行器,应用在四足机器人上。 相比于 MIT Cheetah 2、3 的执行器,其改进的准直驱执行器的优点是成本更低、 体积更小。图 8 展示了 Katz 准直驱执行器的构成,该设计中包含前盖、输出轴 承、行星架、输入引脚、行星滚针轴承、行星轮、齿圈、定子、转子、太阳轮、 后盖、CAN 总线、控制器、直流电源和电子设备盖。简而言之,电机(定子、 转子)、减速器(行星轮、太阳轮、行星架)、轴承(输出轴承、行星滚针轴承)、 控制器和编码器(集成在控制器中)是准直驱执行器的核心部件。

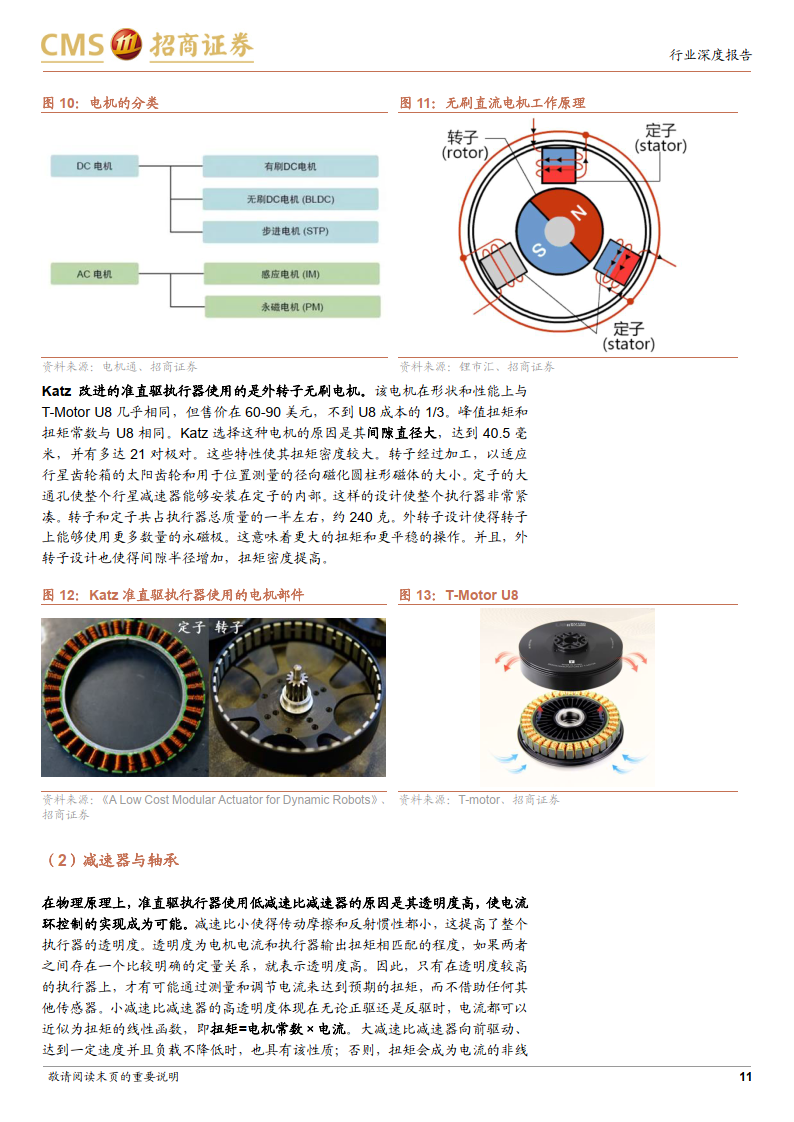
(1)电机:更大的扭矩密度与扭矩惯性
准直驱执行器所用电机需要非常大的扭矩密度与扭矩惯性比。
1)扭矩密度大。 扭矩密度等于电机输出扭矩与电机质量之比。准直驱执行器为了节约成本而使用 低减速比低的减速器,要与高减速比执行器输出同样的扭矩,电机输出扭矩就必 须更大。若准直驱执行器要在大减速比执行器的应用场景下实现代替,则质量也 应相仿。因此,准直驱执行器需要扭矩密度较大的电机。
2)扭矩惯性比大。扭矩与惯性之比就是电机转子的加速度。足够大的加速度让机器人能完成需要高爆发力的、高度动态的动作。
(2)减速器与轴承
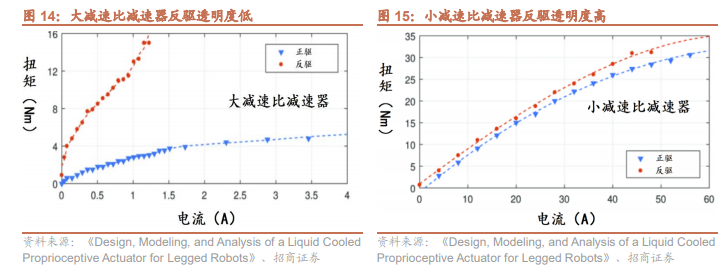
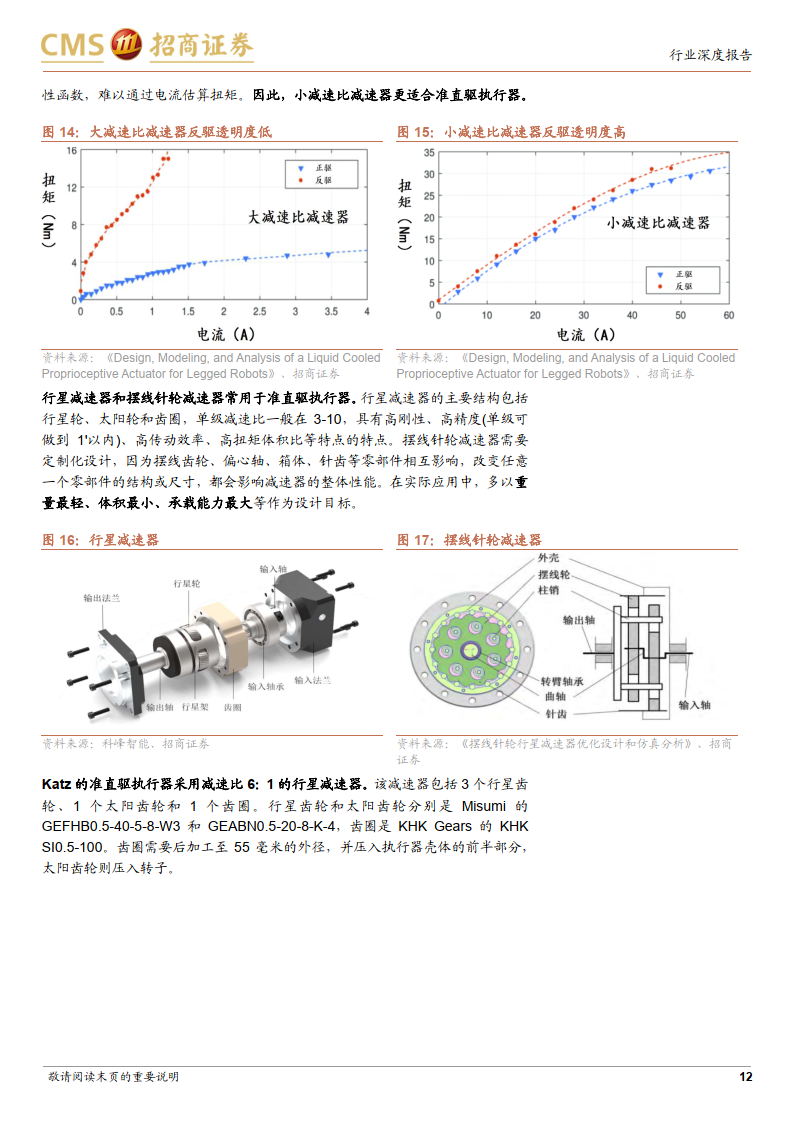
在物理原理上,准直驱执行器使用低减速比减速器的原因是其透明度高,使电流 环控制的实现成为可能。减速比小使得传动摩擦和反射惯性都小,这提高了整个 执行器的透明度。透明度为电机电流和执行器输出扭矩相匹配的程度,如果两者 之间存在一个比较明确的定量关系,就表示透明度高。因此,只有在透明度较高 的执行器上,才有可能通过测量和调节电流来达到预期的扭矩,而不借助任何其 他传感器。小减速比减速器的高透明度体现在无论正驱还是反驱时,电流都可以 近似为扭矩的线性函数,即扭矩=电机常数×电流。大减速比减速器向前驱动、 达到一定速度并且负载不降低时,也具有该性质;否则,扭矩会成为电流的非线性函数,难以通过电流估算扭矩。因此,小减速比减速器更适合准直驱执行器。
(3)控制器
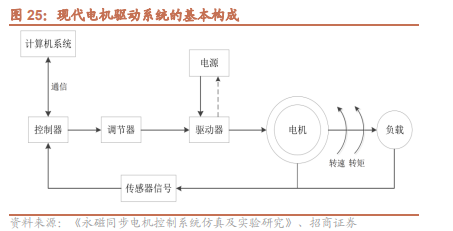
现代电机驱动系统主要由五部分组成,分别为计算机(上位机)、控制器、驱动 器、负载和传感器。由上位机控制控制器,控制器经过调节来控制驱动器,驱动 器按控制指令控制电机带动负载工作,通过传感器采集电机工作信号返回到控制 器,最后由控制器处理后再经过串口通信在上位机上显示工作情况。
(4)编码器
编码器是编码旋转角度、线性位移及速度等运动参数的传感器。编码器将传感器 元件输出的电信号转化为数字或模拟电信号的形式,然后将其传递至控制系统。 目前的准直驱执行器方案使用的是位置编码器。其作用是获取和传递电机转子的 位置和转速信息。目前常用的转子位置传感器有 3 种。
1)霍尔位置传感器安装 简单、体积小、成本低,但输出位置信号分辨率低。
2)旋转变压器精度高、抗 干扰,但输出信号为模拟量,需要专门的解码电路。
3)光电编码器分为增量式 和绝对式。增量式编码器在掉电后会造成数据丢失,且分辨率不高; 绝对式式编 码器直接输出数字量,精度高、抗干扰能力强,且具有掉电记忆功能等优点,应用广泛。




报告共计:34页

