
- 1大数据从入门到精通(超详细版)之Yarn的使用,安装与部署_大数据部署及学习
- 2 【HTML5】2.语法入门总结(第二部分)_
- 3golang单元测试性能测试常见用法
- 4【pynput】鼠标行为追踪并模拟_怎么使用pynput生成一组带有时间戳的鼠标行为
- 5排序(堆排序、快速排序、归并排序)-->深度剖析(二)
- 6python爬取携程旅游评价信息词云图分析_旅游评论的词云图
- 7LangChain记忆(Memory)全解析:让你的应用更懂用户_langchain agent 数据库memory
- 8T5和GPT在预训练和微调区别_gpt模型和ft5的区别
- 9[AI算法][机器学习]:分类及回归问题_机器学习 分类 回归
- 10elasticsearch高可用 原理 (图解+秒懂+史上最全)
自动驾驶Motion Plan之轨迹生成代码实现
赞
踩
自动驾驶Motion Plan之轨迹生成代码实现
文章开始前先回顾下上次的带约束的轨迹生成,轨迹生成本质就是曲线拟合。曲线拟合常用的方法有:多项式、贝赛尔曲线、三次样条差值…下面的例子我们会选择多项式曲线拟合来做讲解。
有了曲线拟合的方法,理论就能够在通过高路径规划得到的wayponit点就能够生成一条可以通行的路径了。然而如果只是生成路径就有点粗糙了,生成路径是需要满足一些约束条件的,比如生成的路径轨迹整体要光滑、路径必须要经过某些指定点、不能碰到障碍物、连续性要求、考虑到移动机器人的物理限制(比如加速度小于20m/s)…
接着就是考虑了这么多约束求解如果太复杂也不行,太复杂了你就跑不快、太复杂了消耗能量大、太复杂了出了问题差问题很难。所以有没可能把上面约束问题都统一到一个求解框架、一步就求解完又成了科研人员研究新方向。
附赠自动驾驶最全的学习资料和量产经验:链接
多项式轨迹拟合
由于四旋翼无人机以及双轮差速轮机器人(不准确的简化),它们轨迹在各个坐标轴上是独立的,因此我们可以对其分别进行轨迹拟合。也就是说我们可以分别对它们在x , y , z x,y,zx,y,z轴上进行路径生成,然后直接将三个轴合成就可以得到一个完整的空间轨迹。
因此后续算法细节介绍中,将不再强调轨迹是一维、二维还是三维,均以一维来进行介绍,可以很容易将其推广到任意维度。
五次多项式曲线表示
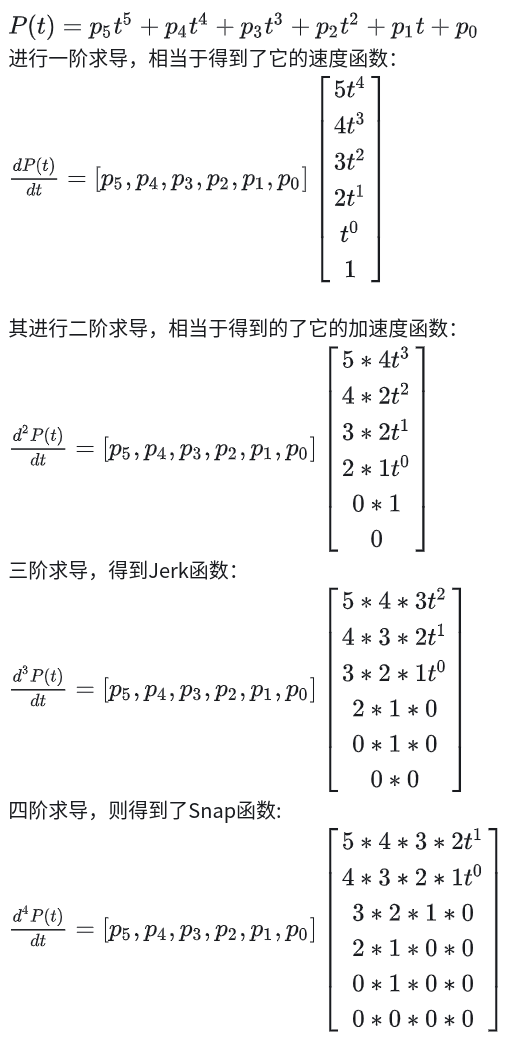
求解
轨迹的表达只与时间 t t t有关,也就是说我们如果知道机器人的起始点位置、位置的一阶倒数(速度),二阶倒数(加速度)和终止位置、位置的一阶倒数(速度),二阶倒数(加速度)方程的参数KaTeX parse error: Undefined control sequence: \[ at position 1: \̲[̲p\_5,p\_4,p\_3,…可以求解出来。那么这段轨迹拟合就能够表示出来了。下面

