
热门标签
热门文章
- 1《关于我摸鱼一天后搞定PyCharm这档事》Python环境配置_pycharm摸鱼插件
- 2三维模型设计新纪元:3D开发工具HOOPS在机械加工行业的应用与优势
- 3python中requests如何使用代理_requests.get proxy
- 4Java开发Twitter爬虫抓取图片和视频并保存到本地_java 获取 twitter视频
- 5创建好的提示词来让 Stable Diffusion 生成 AI 艺术作品图像_stable diffusion 提示词生成
- 6程序猿面试时的65个技巧性回答_程序员面试技巧:如何讲解自己做过的项目
- 7学习记录:Ubuntu系统安装远程控制软件teamviewer_teamviewer ubuntu安装
- 8Linux系统编程中O_APPEND和O_TRUNC标志的使用方法。_o_append flag
- 9Linux-CentOS/统信UOS(v20-1060a/e)安装.net core 6.0运行环境_统信uos 1060a是基于centos8吗
- 10GPT2 & GPT3
当前位置: article > 正文
S32K3 MCAL CAN配置详解 基于EBtresos_eb tresos的mcal配置教程
作者:不正经 | 2024-02-26 05:58:53
赞
踩
eb tresos的mcal配置教程
CAN
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。
CAN的组成一般有两种方式:一种是CPU与CAN driver成到一起、再外接CAN收发器;另一种是CPU与CAN控制器分开的,使用的时候需要配置CAN接口电路,比较麻烦。市面上的MCU基本都采用了CPU与CAN driver集成到一起的方式。
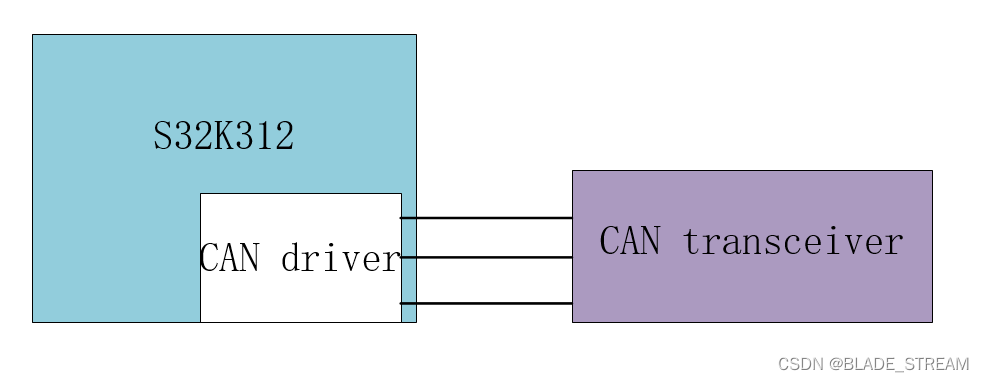
CAN 收发器选择NXP TJA1044,有三个引脚与芯片连接,分别是:
CAN RX
CAN TX
CAN STB
CAN RX与CAN TX掌管信号收发,CAN STB掌管模式控制
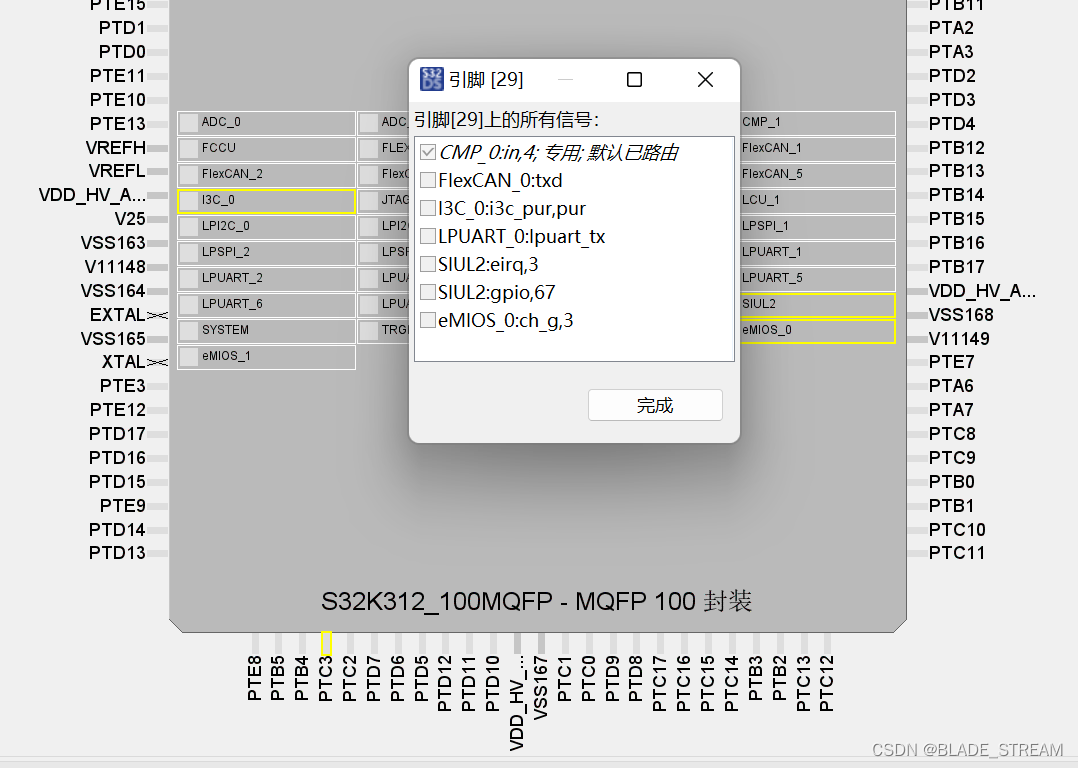
我们选择FLEXCAN_0,在S32DS查看FLEXCAN_0,可以选择PTC3和PTC2作为其信号收发管脚,在PORT模块将上述引脚配置为FLEXCAN_0的信号收发引脚,同时配置一个DIO输出管脚,作为STB

在CanController选项卡下新建一个配置项,双击打开:
在general界面下硬件选择FLEXCAN_0,该界面下主要配置时钟参考点和波特率
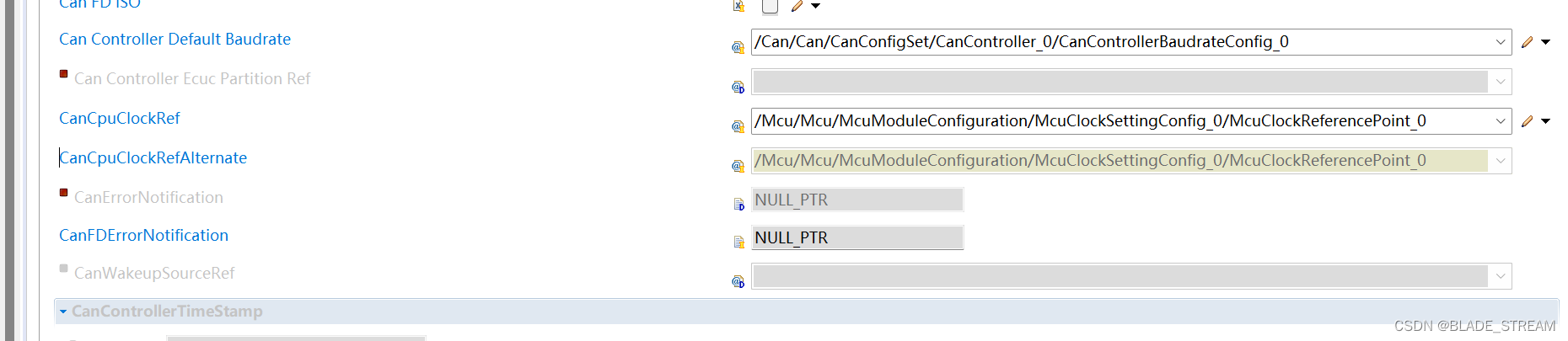
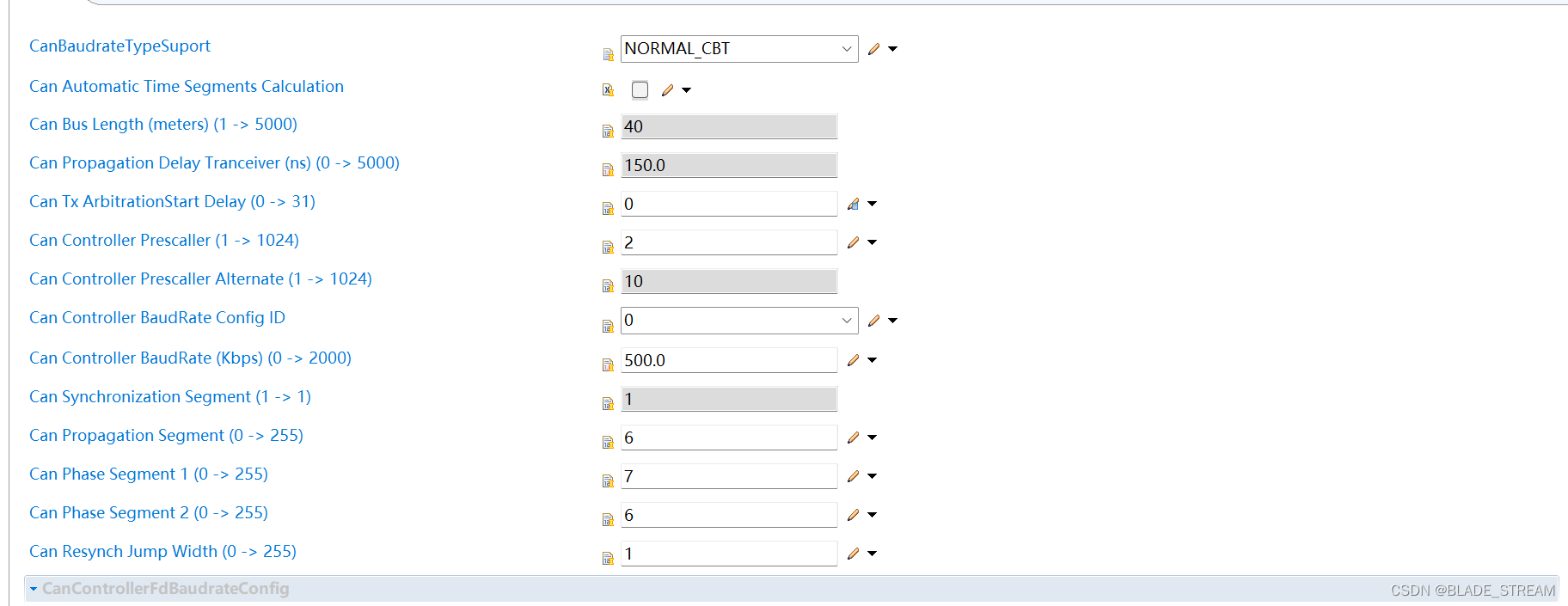
其中:时钟参考点在当前时钟树下选择AIPS_PLAT_CLK(60MHz,这个根据自己配置的时钟树选择),波特率在后面一个选项卡进行配置
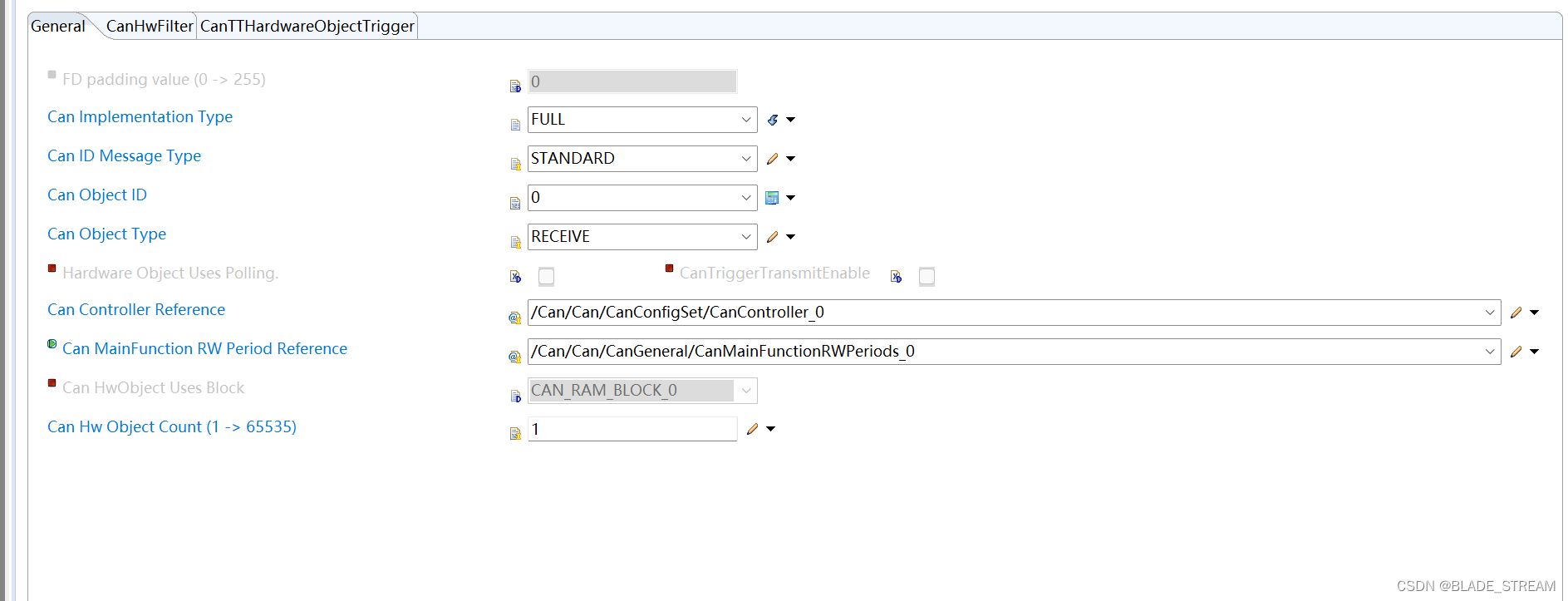
然后就是配置CAN模块的CanHardwareObject,我的理解是CAN的邮箱,示例如下:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/144526
推荐阅读
相关标签

