- 1神经网络基础原理(二)----分类问题(含Tensorflow 2.X代码)_神经网络解决分类问题
- 2关于ssd存储原理的介绍_fstrim debian
- 3android 程序启动 罗升阳,Android 系统的启动过程(3)
- 4鸿蒙操作系统详细流程,鸿蒙系统的启动流程
- 5Quake4的gui_r语言关于quake实验
- 6【Ubuntu20.04】安装gcc11 g++11, Ubuntu18.04
- 7Android——在线计算器完整代码_安卓计算器代码
- 8递归和迭代的理解_人理解迭代,神理解递归翻译
- 9ubuntu 允许本机root用户开启ssh远程登录操作_ssh怎么能直接登录到ubuntu的root用户中
- 10AI监管规则:各国为科技监管开辟了不同的道路
库卡机器人的基本操作_怎么操作库卡机器人
赞
踩
目录
本文讲解了新手对于库卡机器人的一些常用操作,希望能帮助新手快速入门库卡机器人的相关操作,可以通过目录导航到对应的内容。文章不足之处,还请大家指正。
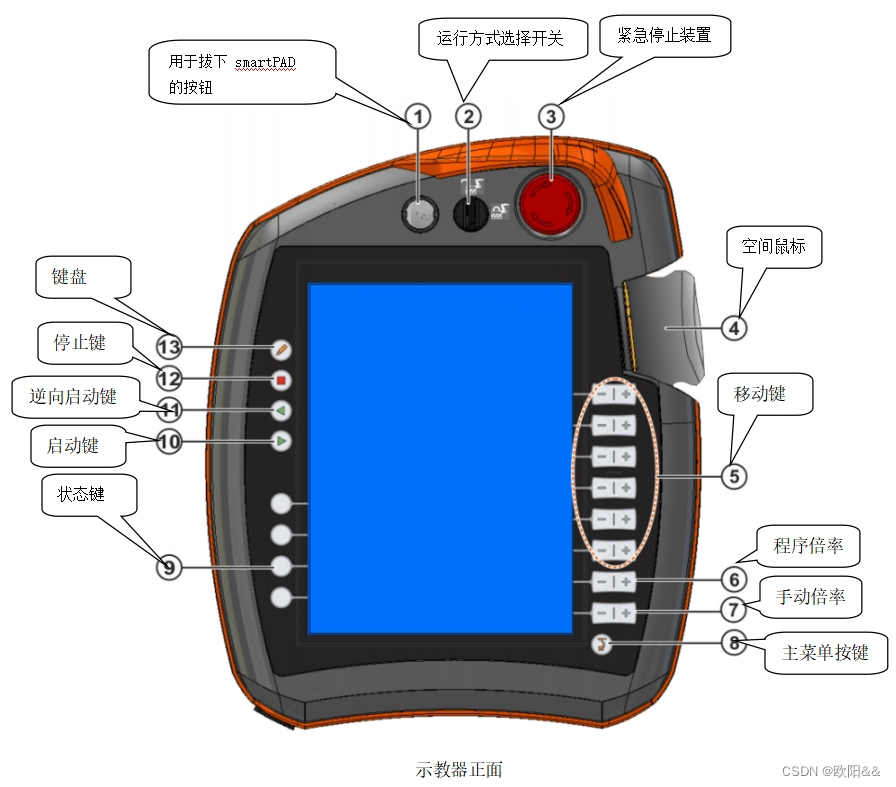
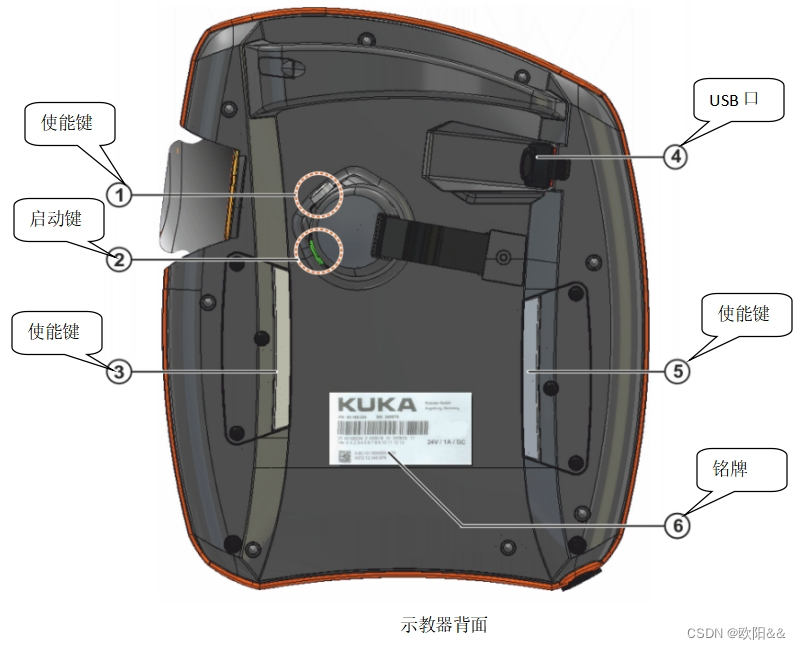
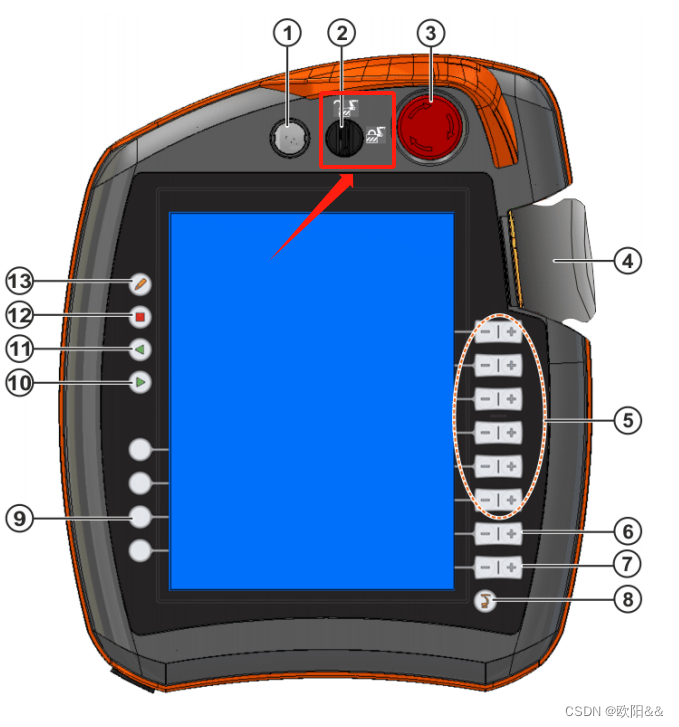
1.示教器界面及功能键介绍
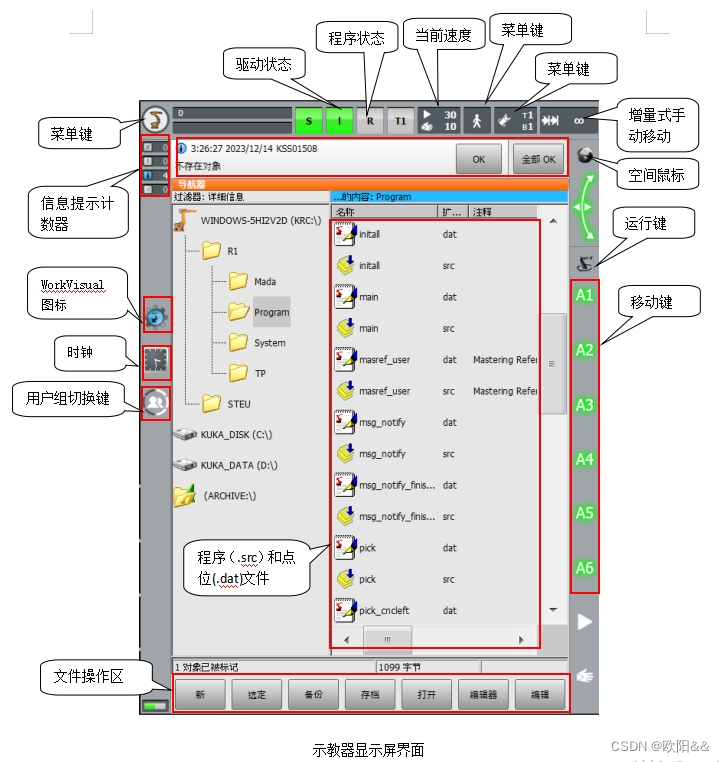
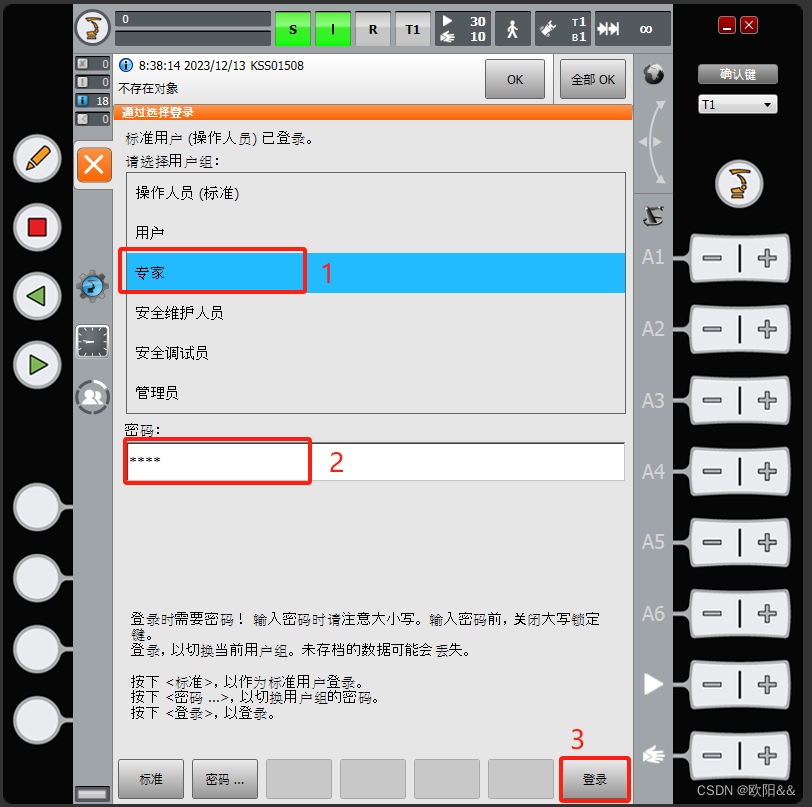
2.用户组切换
很多操作都需要切换到专家权限,所以下面讲解如何从默认的操作人员权限切到专家权限
- 库卡示教器版本低于8.5的:
点击左上角的机器人图标,进入主菜单栏,配置》用户组,然后选专家用户输入密码:kuka

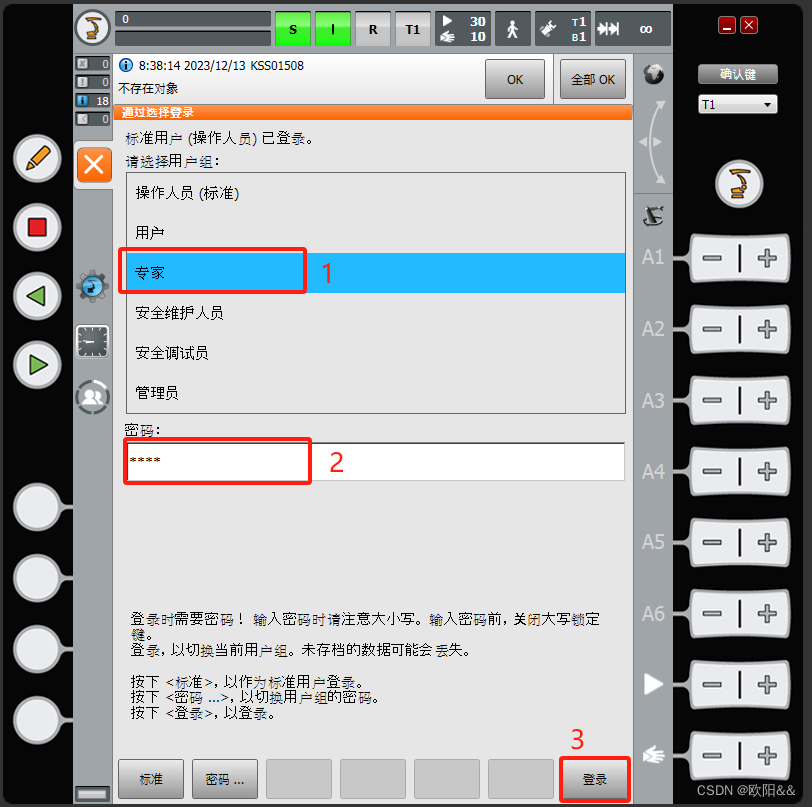
- 库卡示教器8.5版本及以上
点击下图红色框内的图标,直接进入用户组界面,选专家用户输入密码:kuka

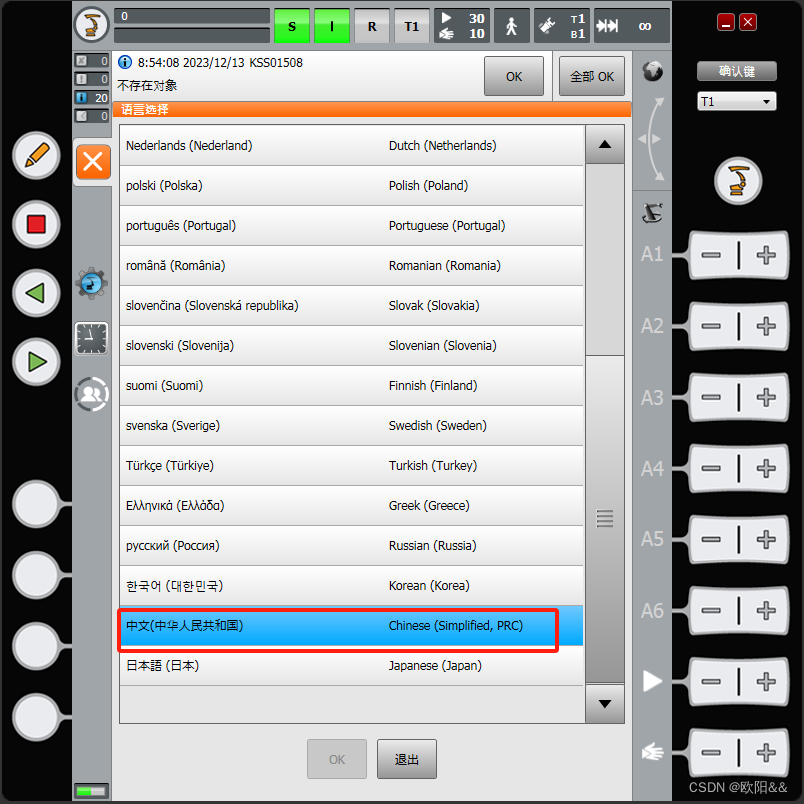
3.更换显示语言
进行语言切换需要登录到专家权限或管理员权限,按照用户组切换的步骤操作。
点击左上角的机器人图标,进入主菜单栏,配置》其他》语言

在语言选择界面,选择“中文”点击下方OK确认即可。
4.数据备份及还原
进行程序备份需要准备一个U盘,把U盘插在控制柜的usb卡槽,备份程序及还原程序都需要登录到专家权限。
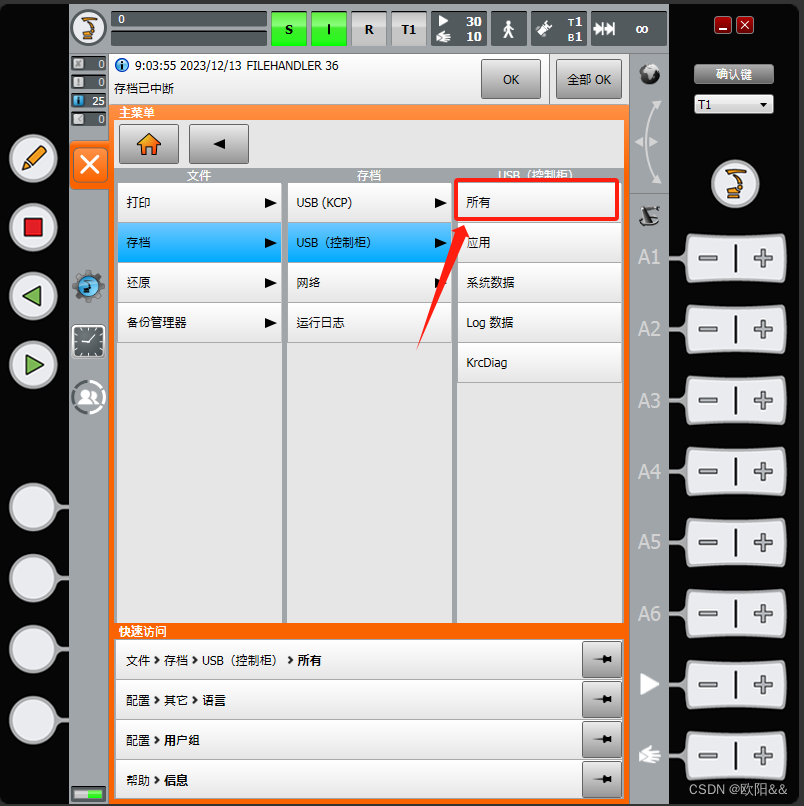
1.数据备份:
点击左上角的机器人图标,进入主菜单栏,文件》存档》USB(控制柜)

备份的内容建议选“所有”,会备份库卡程序、系统数据、log数据、KrcDiag等文件。
2.数据还原:
把之前备份的U盘插在控制柜上,进入示教器界面,登录专家权限
点击左上角的机器人图标,进入主菜单栏,文件》还原》USB(控制柜)

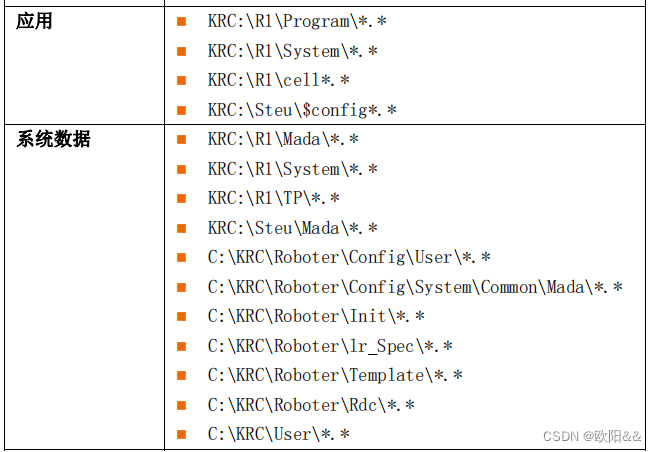
还原的内容根据需要选择(所有、应用、系统数据)。
所有:包括应用数据、系统数据
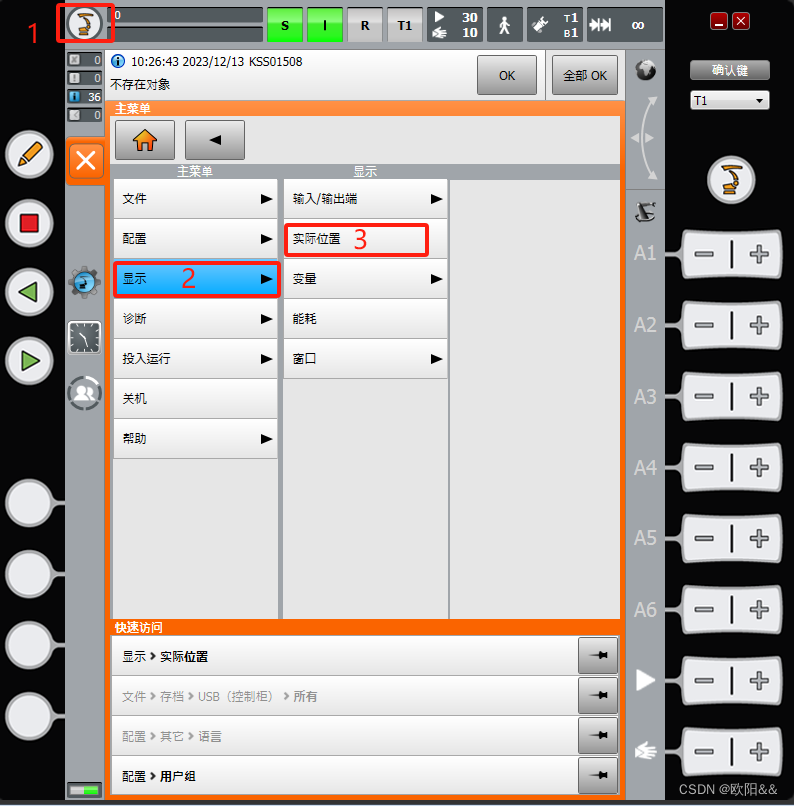
5.显示当前实际位置
笛卡尔式实际位置:
点击左上角的机器人图标,进入主菜单栏,显示》实际位置
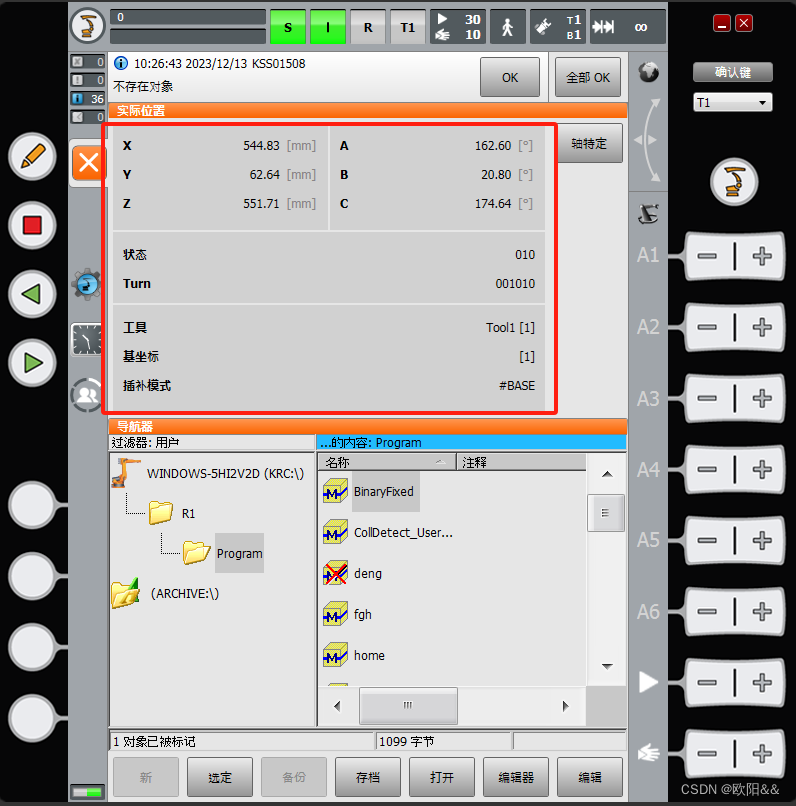
轴坐标式实际位置:
在“实际位置”点击“轴特定”即可显示轴坐标式的实际位置。


6.手动移动机器人(轴运行、基坐标运动)
手动移动机器人需要在T1或T2运行模式,如果在“AUT”和“AUT EXT”模式下需要进行模式切换。
- 查看当前的运行模式
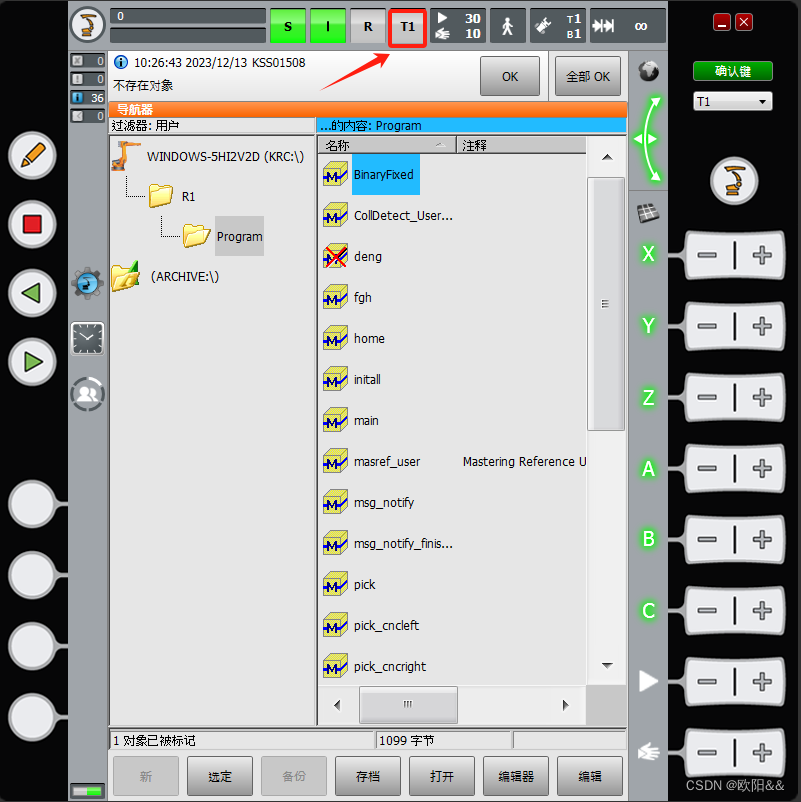
2.如果不是T1或T2模式,手动拨动切换钥匙,选T1或T2
3.同时按住使能键和移动键,就可以手动移动机器人(建议手动运行速度不超过10%)

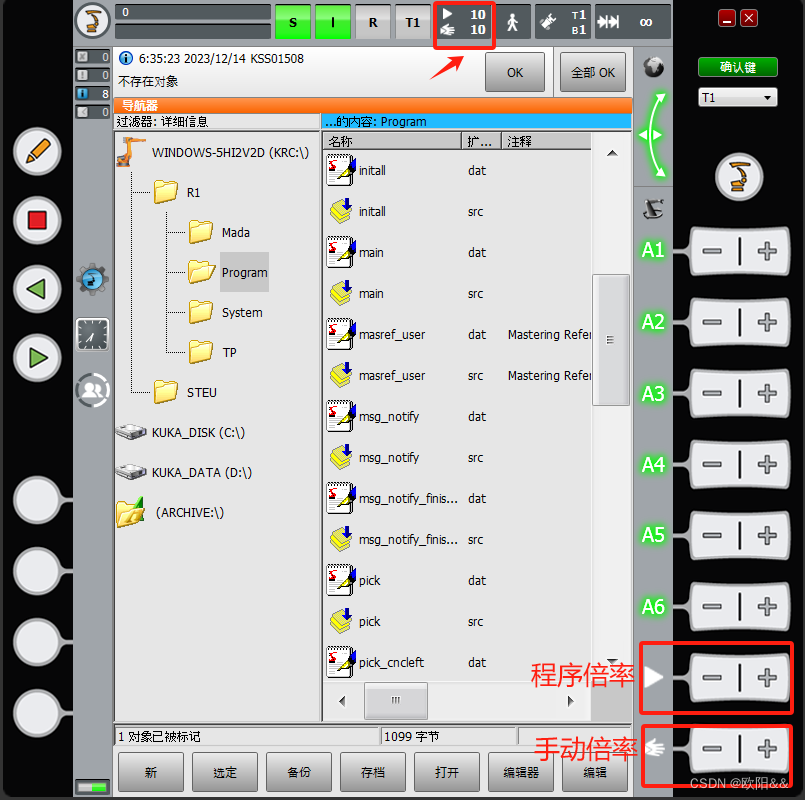
7.运行速度倍率调整
运行速度倍率分为程序倍率和手动倍率,程序倍率表示手动运行程序或自动运行程序的速度,手动倍率表示手动移动机器人的速度。速度设置范围1-100(在手动运行下速度不要超过10%)