
- 1uniapp 总结篇 (小程序)_uniapp开发小程序
- 2chatgpt赋能python:用Python画龙:SEO技巧大放送_用python画一条龙
- 3!!!亲测成功:langchain+ChatGLM 大模型部署_chatglm3 如何langchain结合
- 4tf.data.Dataset.map()函数的理解
- 5基于yolov5的目标检测-停车位检测、低矮障碍物、地面标识检测等_yolo算法准确识别车辆,车位划线
- 6微信小程序接入直播_微信小程序如何对接直播
- 7基于本地知识库的大模型搭建教程_python 个人知识库搭建
- 8Gradle下载以及安装教程_gradle-5.5.1-bin.zip
- 9C++异步变化:libunifex实现!
- 10面试知识点梳理及相关面试题(三) -- springcloud_springcloudalibaba面试题
Linux进程间通信详解(最全)
赞
踩
进程间的五种通信方式介绍
进程间通信(IPC,InterProcess Communication)是指在不同进程之间传播或交换信息。IPC的方式通常有管道(包括无名管道和命名管道)、消息队列、信号量、共享内存、Socket(套接字)等。其中 Socket和支持不同主机上的两个进程IPC。
一、管道
管道,通常指无名管道,是 UNIX 系统IPC最古老的形式。
1、特点:
-
它是半双工的(即数据只能在一个方向上流动),具有固定的读端和写端。
-
它只能用于具有亲缘关系的进程之间的通信(也是父子进程或者兄弟进程之间)。
-
它可以看成是一种特殊的文件,对于它的读写也可以使用普通的read、write 等函数。但是它不是普通的文件,并不属于其他任何文件系统,并且只存在于内存中。
2、原型:
#include <stdio.h>int pipe(int fd[2]); // 返回值:若成功返回0,失败返回-1;当一个管道建立时,它会创建两个文件描述符:fd[0]为读而打开,fd[1]为写而打开。如下图:
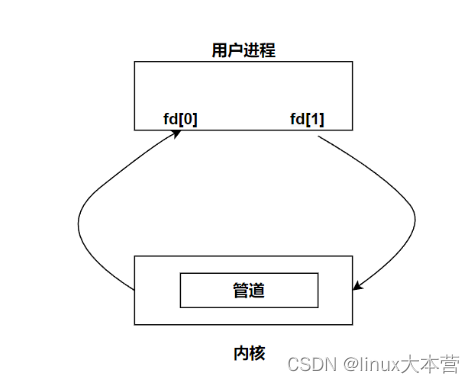
要关闭管道只需将这两个文件描述符关闭即可。
3、For Example
单个进程中的管道几乎没有任何用处。所以,通常调用 pipe 的进程接着调用 fork,这样就创建了父进程与子进程之间的 IPC 通道。如下图所示:

若要数据流从父进程流向子进程,则关闭父进程的读端(fd[0])与子进程的写端(fd[1]);反之,则可以使数据流从子进程流向父进程。
#include <stdio.h>#include <stdlib.h>int main(){ int fd[2]; // 两个文件描述符 pid_t pid; char buff[20]; if (pipe(fd) < 0) { printf("Create Pipe Error!\n"); } if ((pid = fork()) < 0) // 创建子进程 { printf("Fork Error!\n"); } else if (pid > 0) // 父进程 { close(fd[0]); // 关闭读端 write(fd[1], "Hello World\n", 12); } else { close(fd[1]); // 关闭写端 read(fd[0], buff, 20); printf ("%s", buff); } return 0;}相关视频推荐
2023年最新技术图谱,c++后端的8个技术维度,助力你快速成为大牛
免费学习地址:c/c++ linux服务器开发/后台架构师
需要C/C++ Linux服务器架构师学习资料加qun812855908获取(资料包括C/C++,Linux,golang技术,Nginx,ZeroMQ,MySQL,Redis,fastdfs,MongoDB,ZK,流媒体,CDN,P2P,K8S,Docker,TCP/IP,协程,DPDK,ffmpeg等),免费分享

二、FIFO
FIFO,也称为命名管道,是一种文件类型。
1、特点
-
FIFO可以在无关的进程之间交换数据,与无名管道不同。
-
FIFO有路径名与之相关联,它以一种特殊设备文件形式存在于文件系统中。
2、原型
#include <stdio.h>// 返回值:成功返回0, 出错返回-1int mkfifo(const char* pathname, mode_t mode);其中的 mode 参数与open函数中的 mode 相同。一旦创建了一个 FIFO,就可以用一般的文件I/O函数操作它。
当 open 一个FIFO时,是否设置非阻塞标志(O_NONBLOCK)的区别:
-
若没有指定O_NONBLOCK(默认),只读 open 要阻塞到某个其他进程为写而打开此 FIFO。类似的,只写 open 要阻塞到某个其他进程为读而打开它。
-
若指定了O_NONBLOCK,则只读 open 立即返回。而只写 open 将出错返回 -1 如果没有进程已经为读而打开该 FIFO,其errno置ENXIO。
3、For Example
FIFO的通信方式类似于在进程中使用文件来传输数据,只不过FIFO类型文件同时具有管道的特性。在数据读出时,FIFO管道中同时清除数据,并且“先进先出”。下面的例子演示了使用 FIFO 进行 IPC 的过程:
write_fifo.c
#include<stdio.h>#include<stdlib.h> // exit#include<fcntl.h> // O_WRONLY#include<sys/stat.h>#include<time.h> // timeint main(){ int fd; int n, i; char buf[1024]; time_t tp; printf("I am %d process.\n", getpid()); // 说明进程ID if((fd = open("fifo1", O_WRONLY)) < 0) // 以写打开一个FIFO { perror("Open FIFO Failed"); exit(1); } for(i=0; i<10; ++i) { time(&tp); // 取系统当前时间 n=sprintf(buf,"Process %d's time is %s",getpid(),ctime(&tp)); printf("Send message: %s", buf); // 打印 if(write(fd, buf, n+1) < 0) // 写入到FIFO中 { perror("Write FIFO Failed"); close(fd); exit(1); } sleep(1); // 休眠1秒 } close(fd); // 关闭FIFO文件 return 0;}read_fifo.c
#include <stdio.h>int main(){ int fd; int len; char buf[1024]; if (mkfifo("fifo 1", 0666) < 0 && errno != EXIST) // 创建FIFO管道 { perror ("Create FIFO Failed\n"); } if ((fd = open("fifo 1", R_ONLY)) < 0) // 以读方式打开 { perror ("Open FIFO Failed\n"); exit(1); } while ((len == read(buf, buf, 1024)) > 0) // 读取FIFO管道 { printf ("Read Message: %s", buf); } close(fd); return 0;}在两个终端里用 gcc 分别编译运行上面两个文件,可以看到输出结果如下:
[xq@localhost]$ ./write_fifoI am 7872 processSend message: Process 7872's time is Mon Jan 16 18:00:23 2023Send message: Process 7872's time is Mon Jan 16 18:00:24 2023Send message: Process 7872's time is Mon Jan 16 18:00:25 2023Send message: Process 7872's time is Mon Jan 16 18:00:26 2023Send message: Process 7872's time is Mon Jan 16 18:00:27 2023Send message: Process 7872's time is Mon Jan 16 18:00:28 2023Send message: Process 7872's time is Mon Jan 16 18:00:29 2023Send message: Process 7872's time is Mon Jan 16 18:00:30 2023Send message: Process 7872's time is Mon Jan 16 18:00:31 2023Send message: Process 7872's time is Mon Jan 16 18:00:32 2023[xq@localhost]$ ./write_fifoI am 7872 processSend message: Process 7872's time is Mon Jan 16 18:00:23 2023Send message: Process 7872's time is Mon Jan 16 18:00:24 2023Send message: Process 7872's time is Mon Jan 16 18:00:25 2023Send message: Process 7872's time is Mon Jan 16 18:00:26 2023Send message: Process 7872's time is Mon Jan 16 18:00:27 2023Send message: Process 7872's time is Mon Jan 16 18:00:28 2023Send message: Process 7872's time is Mon Jan 16 18:00:29 2023Send message: Process 7872's time is Mon Jan 16 18:00:30 2023Send message: Process 7872's time is Mon Jan 16 18:00:31 2023Send message: Process 7872's time is Mon Jan 16 18:00:32 2023上面的例子可以扩展成 客户端进程—服务端进程通信的实例,write_fifo的作用类似于客户端,可以打开多个客户端向一个服务器发送请求信息,read_fifo类似于服务器,它适时监控着FIFO的读端,当有数据时,读出并进行处理,但是有一个关键的问题是,每一个客户端必须预先知道服务器提供的FIFO接口,下图显示了这样的操作:

三、消息队列
消息队列,是消息的链接表,存放在内核中。一个消息队列由一个标识符(即队列ID)来标识。
1、特点
-
消息队列是面向记录的,其中的消息具有特定的格式以及特定的优先级。
-
消息队列独立于发送与接收进程。进程终止时,消息队列及其内容并不会被删除。
-
消息队列可以实现消息的随机查询,消息不一定要以先进先出的次序读取,也可以按消息的类型读取。
2、原型
#include <stdio.h>// 创建或打开消息队列:成功返回队列ID,失败返回-1int msgget(key_t key, int flag);// 添加消息:成功返回0,失败返回-1int msgsnd(int msqid, const void ptr, size_t size, int flag);// 读取消息:成功返回消息数据的长度,失败返回-1int msgrcv(int msqid, void* ptr, size_t size, long type, int flag);// 控制消息队列:成功返回0, 失败返回-1int msgctl(int msqid, int cmd, struct msqid_ds * buf);在以下两种情况下,msgget将创建一个新的消息队列:
-
如果没有与键值key相对应的消息队列,并且flag中包含了
IPC_CREAT标志位。 -
key参数为IPC_PRIVATE。
函数msgrcv在读取消息队列时,type参数有下面几种情况:
-
type == 0,返回队列中的第一个消息;
-
type > 0,返回队列中消息类型为 type 的第一个消息;
-
type < 0,返回队列中消息类型值小于或等于 type 绝对值的消息,如果有多个,则取类型值最小的消息。
可以看出,type值非 0 时用于以非先进先出次序读消息。也可以把 type 看做优先级的权值。(其他的参数解释,请自行Google之)
3、For Example
下面写了一个简单的使用消息队列进行IPC的例子,服务端程序一直在等待特定类型的消息,当收到该类型的消息以后,发送另一种特定类型的消息作为反馈,客户端读取该反馈并打印出来。
msg_server.c
#include<stdio.h>#include<stdlib.h>#include<sys/stat.h>#include<time.h>// 用于创建一个唯一的key#define MSG_FILE "/etc/passwd"// 消息结构struct msg_form { long mtype; char mtext[256];};int main(){ int msqid; key_t key; struct msg_form msg; // 获取key值 if((key = ftok(MSG_FILE,'z')) < 0) { perror("ftok error"); exit(1); } // 打印key值 printf("Message Queue - Server key is: %d.\n", key); // 创建消息队列 if ((msqid = msgget(key, IPC_CREAT|0777)) == -1) { perror("msgget error"); exit(1); } // 打印消息队列ID及进程ID printf("My msqid is: %d.\n", msqid); printf("My pid is: %d.\n", getpid()); // 循环读取消息 for(;;) { msgrcv(msqid, &msg, 256, 888, 0);// 返回类型为888的第一个消息 printf("Server: receive msg.mtext is: %s.\n", msg.mtext); printf("Server: receive msg.mtype is: %d.\n", msg.mtype); msg.mtype = 999; // 客户端接收的消息类型 sprintf(msg.mtext, "hello, I'm server %d", getpid()); msgsnd(msqid, &msg, sizeof(msg.mtext), 0); } return 0; }
msg_client.c
#include<stdio.h>#include<stdlib.h>#include<sys/stat.h>#include<time.h>// 用于创建一个唯一的key#define MSG_FILE "/etc/passwd"// 消息结构struct msg_form { long mtype; char mtext[256];};int main(){ int msqid; key_t key; struct msg_form msg; // 获取key值 if ((key = ftok(MSG_FILE, 'z')) < 0) { perror("ftok error"); exit(1); } // 打印key值 printf("Message Queue - Client key is: %d.\n", key); // 打开消息队列 if ((msqid = msgget(key, IPC_CREAT|0777)) == -1) { perror("msgget error"); exit(1); } // 打印消息队列ID及进程ID printf("My msqid is: %d.\n", msqid); printf("My pid is: %d.\n", getpid()); // 添加消息,类型为888 msg.mtype = 888; sprintf(msg.mtext, "hello, I'm client %d", getpid()); msgsnd(msqid, &msg, sizeof(msg.mtext), 0); // 读取类型为777的消息 msgrcv(msqid, &msg, 256, 999, 0); printf("Client: receive msg.mtext is: %s.\n", msg.mtext); printf("Client: receive msg.mtype is: %d.\n", msg.mtype); return 0;}四、信号量
信号量(semaphore)与已经介绍过的 IPC 结构不同,它是一个计数器。信号量用于实现进程间的互斥与同步,而不是用于存储进程间通信数据。
1、特点
-
信号量用于进程间同步,若要在进程间传递数据需要结合共享内存。
-
信号量基于操作系统的 PV 操作,程序对信号量的操作都是原子操作。
-
每次对信号量的 PV 操作不仅限于对信号量值加 1 或减 1,而且可以加减任意正整数。
-
支持信号量组。
2、原型
最简单的信号量是只能取 0 和 1 的变量,这也是信号量最常见的一种形式,叫做二值信号量(Binary Semaphore)。而可以取多个正整数的信号量被称为通用信号量。
Linux 下的信号量函数都是在通用的信号量数组上进行操作,而不是在一个单一的二值信号量上进行操作。
#include <stdio.h>// 创建或获取一个信号量组:若成功返回信号量集ID,失败返回-1int semget(key_t key, int num_sems, int sem_flags);// 对信号量组进行操作,改变信号量的值:成功返回0,失败返回-1int semop(int semid, struct sembuf semoparray[], size_t numops); // 控制信号量的相关信息int semctl(int semid, int sem_num, int cmd, ...);当semget创建新的信号量集合时,必须指定集合中信号量的个数(即num_sems),通常为1;如果是引用一个现有的集合,则将num_sems指定为 0 。
在semop函数中,sembuf结构的定义如下:
struct sembuf { short sem_num; // 信号量组中对应的序号,0~sem_nums-1 short sem_op; // 信号量值在一次操作中的改变量 short sem_flg; // IPC_NOWAIT, SEM_UNDO}其中 sem_op 是一次操作中的信号量的改变量:
-
若sem_op > 0,表示进程释放相应的资源数,将 sem_op 的值加到信号量的值上。如果有进程正在休眠等待此信号量,则换行它们。
-
若sem_op < 0,请求 sem_op 的绝对值的资源。
-
sem_flg 指定IPC_NOWAIT,则semop函数出错返回
EAGAIN。 -
sem_flg 没有指定IPC_NOWAIT,则将该信号量的semncnt值加1,然后进程挂起直到下述情况发生:
-
当相应的资源数可以满足请求,此信号量的semncnt值减1,该信号量的值减去sem_op的绝对值。成功返回;
-
此信号量被删除,函数smeop出错返回EIDRM;
-
进程捕捉到信号,并从信号处理函数返回,此情况下将此信号量的semncnt值减1,函数semop出错返回EINTR
-
如果相应的资源数可以满足请求,则将该信号量的值减去sem_op的绝对值,函数成功返回。
-
当相应的资源数不能满足请求时,这个操作与sem_flg有关。
-
-
若sem_op == 0,进程阻塞直到信号量的相应值为0:
-
sem_flg指定IPC_NOWAIT,则出错返回EAGAIN。
-
sem_flg没有指定IPC_NOWAIT,则将该信号量的semncnt值加1,然后进程挂起直到下述情况发生:
-
信号量值为0,将信号量的semzcnt的值减1,函数semop成功返回;
-
此信号量被删除,函数smeop出错返回EIDRM;
-
进程捕捉到信号,并从信号处理函数返回,在此情况将此信号量的semncnt值减1,函数semop出错返回EINTR
-
当信号量已经为0,函数立即返回。
-
如果信号量的值不为0,则依据sem_flg决定函数动作:
-
在semctl函数中的命令有多种,这里就说两个常用的:
-
SETVAL:用于初始化信号量为一个已知的值。所需要的值作为联合semun的val成员来传递。在信号量第一次使用之前需要设置信号量。
-
IPC_RMID:删除一个信号量集合。如果不删除信号量,它将继续在系统中存在,即使程序已经退出,它可能在你下次运行此程序时引发问题,而且信号量是一种有限的资源。
3、For Example
#include<stdio.h>#include<stdlib.h>#include<sys/stat.h>#include<time.h>// 联合体,用于semctl初始化union semun{ int val; /for SETVAL/ struct semid_ds buf; unsigned short *array;};// 初始化信号量int init_sem(int sem_id, int value){ union semun tmp; tmp.val = value; if(semctl(sem_id, 0, SETVAL, tmp) == -1) { perror("Init Semaphore Error"); return -1; } return 0;}// P操作:// 若信号量值为1,获取资源并将信号量值-1 // 若信号量值为0,进程挂起等待int sem_p(int sem_id){ struct sembuf sbuf; sbuf.sem_num = 0; /序号/ sbuf.sem_op = -1; /P操作/ sbuf.sem_flg = SEM_UNDO; if(semop(sem_id, &sbuf, 1) == -1) { perror("P operation Error"); return -1; } return 0;}// V操作:// 释放资源并将信号量值+1// 如果有进程正在挂起等待,则唤醒它们int sem_v(int sem_id){ struct sembuf sbuf; sbuf.sem_num = 0; /序号/ sbuf.sem_op = 1; /V操作/ sbuf.sem_flg = SEM_UNDO; if(semop(sem_id, &sbuf, 1) == -1) { perror("V operation Error"); return -1; } return 0;}// 删除信号量集int del_sem(int sem_id){ union semun tmp; if(semctl(sem_id, 0, IPC_RMID, tmp) == -1) { perror("Delete Semaphore Error"); return -1; } return 0;}int main(){ int sem_id; // 信号量集ID key_t key; pid_t pid; // 获取key值 if((key = ftok(".", 'z')) < 0) { perror("ftok error"); exit(1); } // 创建信号量集,其中只有一个信号量 if((sem_id = semget(key, 1, IPC_CREAT|0666)) == -1) { perror("semget error"); exit(1); } // 初始化:初值设为0资源被占用 init_sem(sem_id, 0); if((pid = fork()) == -1) perror("Fork Error"); else if(pid == 0) /子进程/ { sleep(2); printf("Process child: pid=%d\n", getpid()); sem_v(sem_id); /释放资源/ } else /父进程/ { sem_p(sem_id); /等待资源/ printf("Process father: pid=%d\n", getpid()); sem_v(sem_id); /释放资源/ del_sem(sem_id); /删除信号量集/ } return 0;}上面的例子如果不加信号量,则父进程会先执行完毕。这里加了信号量让父进程等待子进程执行完以后再执行。
五、共享内存
共享内存(Shared Memory),指两个或多个进程共享一个给定的存储区。
1、特点
-
共享内存是最快的一种 IPC,因为进程是直接对内存进行存取。
-
因为多个进程可以同时操作,所以需要进行同步。
-
信号量+共享内存通常结合在一起使用,信号量用来同步对共享内存的访问。
2、原型
#include <stdio.h>// 创建或获取一个共享内存:成功返回共享内存ID,失败返回-1int shmget(key_t key, size_t size, int flag);// 连接共享内存到当前进程的地址空间:成功返回指向共享内存的指针,失败返回-1void shmat(int shm_id, const void *addr, int flag);// 断开与共享内存的连接:成功返回0,失败返回-1int shmdt(void addr); // 控制共享内存的相关信息:成功返回0,失败返回-1int shmctl(int shm_id, int cmd, struct shmid_ds *buf);当用shmget函数创建一段共享内存时,必须指定其size;而如果引用一个已存在的共享内存,则将size指定为0 。
当一段共享内存被创建以后,它并不能被任何进程访问。必须使用shmat函数连接该共享内存到当前进程的地址空间,连接成功后把共享内存区对象映射到调用进程的地址空间,随后可像本地空间一样访问。
shmdt函数是用来断开shmat建立的连接的。注意,这并不是从系统中删除该共享内存,只是当前进程不能再访问该共享内存而已。
shmctl函数可以对共享内存执行多种操作,根据参数 cmd 执行相应的操作。常用的是IPC_RMID(从系统中删除该共享内存)。
3、For Example
下面这个例子,使用了【共享内存+信号量+消息队列】的组合来实现服务器进程与客户进程间的通信。
-
共享内存用来传递数据;
-
信号量用来同步;
-
消息队列用来 在客户端修改了共享内存后 通知服务器读取。
server.c
#include <stdio.h>#include <memory> // shared memory#include <semaphore> // semaphore#include <queue> // message queue// 消息队列结构struct msg_form { long mtype; char mtext;};// 联合体,用于semctl初始化union semun{ int val; /for SETVAL/ struct semid_ds buf; unsigned short *array;};// 初始化信号量int init_sem(int sem_id, int value){ union semun tmp; tmp.val = value; if(semctl(sem_id, 0, SETVAL, tmp) == -1) { perror("Init Semaphore Error"); return -1; } return 0;}// P操作:// 若信号量值为1,获取资源并将信号量值-1 // 若信号量值为0,进程挂起等待int sem_p(int sem_id){ struct sembuf sbuf; sbuf.sem_num = 0; /序号/ sbuf.sem_op = -1; /P操作/ sbuf.sem_flg = SEM_UNDO; if(semop(sem_id, &sbuf, 1) == -1) { perror("P operation Error"); return -1; } return 0;}// V操作:// 释放资源并将信号量值+1// 如果有进程正在挂起等待,则唤醒它们int sem_v(int sem_id){ struct sembuf sbuf; sbuf.sem_num = 0; /序号/ sbuf.sem_op = 1; /V操作/ sbuf.sem_flg = SEM_UNDO; if(semop(sem_id, &sbuf, 1) == -1) { perror("V operation Error"); return -1; } return 0;}// 删除信号量集int del_sem(int sem_id){ union semun tmp; if(semctl(sem_id, 0, IPC_RMID, tmp) == -1) { perror("Delete Semaphore Error"); return -1; } return 0;}// 创建一个信号量集int creat_sem(key_t key){ int sem_id; if((sem_id = semget(key, 1, IPC_CREAT|0666)) == -1) { perror("semget error"); exit(-1); } init_sem(sem_id, 1); /初值设为1资源未占用/ return sem_id;}int main(){ key_t key; int shmid, semid, msqid; char shm; char data[] = "this is server"; struct shmid_ds buf1; /用于删除共享内存/ struct msqid_ds buf2; /用于删除消息队列/ struct msg_form msg; /消息队列用于通知对方更新了共享内存/ // 获取key值 if((key = ftok(".", 'z')) < 0) { perror("ftok error"); exit(1); } // 创建共享内存 if((shmid = shmget(key, 1024, IPC_CREAT|0666)) == -1) { perror("Create Shared Memory Error"); exit(1); } // 连接共享内存 shm = (char*)shmat(shmid, 0, 0); if((int)shm == -1) { perror("Attach Shared Memory Error"); exit(1); } // 创建消息队列 if ((msqid = msgget(key, IPC_CREAT|0777)) == -1) { perror("msgget error"); exit(1); } // 创建信号量 semid = creat_sem(key); // 读数据 while(1) { msgrcv(msqid, &msg, 1, 888, 0); /读取类型为888的消息/ if(msg.mtext == 'q') /quit - 跳出循环/ break; if(msg.mtext == 'r') /read - 读共享内存/ { sem_p(semid); printf("%s\n",shm); sem_v(semid); } } // 断开连接 shmdt(shm); /删除共享内存、消息队列、信号量/ shmctl(shmid, IPC_RMID, &buf1); msgctl(msqid, IPC_RMID, &buf2); del_sem(semid); return 0;}client.c
#include <stdio.h>#include <memory> // shared memory#include <semaphore> // semaphore#include <queue> // message queue// 消息队列结构struct msg_form { long mtype; char mtext;};// 联合体,用于semctl初始化union semun{ int val; /for SETVAL/ struct semid_ds buf; unsigned short *array;};// P操作:// 若信号量值为1,获取资源并将信号量值-1 // 若信号量值为0,进程挂起等待int sem_p(int sem_id){ struct sembuf sbuf; sbuf.sem_num = 0; /序号/ sbuf.sem_op = -1; /P操作/ sbuf.sem_flg = SEM_UNDO; if(semop(sem_id, &sbuf, 1) == -1) { perror("P operation Error"); return -1; } return 0;}// V操作:// 释放资源并将信号量值+1// 如果有进程正在挂起等待,则唤醒它们int sem_v(int sem_id){ struct sembuf sbuf; sbuf.sem_num = 0; /序号/ sbuf.sem_op = 1; /V操作/ sbuf.sem_flg = SEM_UNDO; if(semop(sem_id, &sbuf, 1) == -1) { perror("V operation Error"); return -1; } return 0;}int main(){ key_t key; int shmid, semid, msqid; char shm; struct msg_form msg; int flag = 1; /while循环条件/ // 获取key值 if((key = ftok(".", 'z')) < 0) { perror("ftok error"); exit(1); } // 获取共享内存 if((shmid = shmget(key, 1024, 0)) == -1) { perror("shmget error"); exit(1); } // 连接共享内存 shm = (char*)shmat(shmid, 0, 0); if((int)shm == -1) { perror("Attach Shared Memory Error"); exit(1); } // 创建消息队列 if ((msqid = msgget(key, 0)) == -1) { perror("msgget error"); exit(1); } // 获取信号量 if((semid = semget(key, 0, 0)) == -1) { perror("semget error"); exit(1); } // 写数据 printf("\n"); printf("* IPC \n"); printf(" Input r to send data to server. \n"); printf(" Input q to quit. \n"); printf("\n"); while(flag) { char c; printf("Please input command: "); scanf("%c", &c); switch(c) { case 'r': printf("Data to send: "); sem_p(semid); /访问资源/ scanf("%s", shm); sem_v(semid); /释放资源/ /清空标准输入缓冲区/ while((c=getchar())!='\n' && c!=EOF); msg.mtype = 888; msg.mtext = 'r'; /发送消息通知服务器读数据/ msgsnd(msqid, &msg, sizeof(msg.mtext), 0); break; case 'q': msg.mtype = 888; msg.mtext = 'q'; msgsnd(msqid, &msg, sizeof(msg.mtext), 0); flag = 0; break; default: printf("Wrong input!\n"); /清空标准输入缓冲区*/ while((c=getchar())!='\n' && c!=EOF); } } // 断开连接 shmdt(shm); return 0;}注意:当scanf()输入字符或字符串时,缓冲区中遗留下了\n,所以每次输入操作后都需要清空标准输入的缓冲区。但是由于 gcc 编译器不支持fflush(stdin)(它只是标准C的扩展),所以我们使用了替代方案:
while((c=getchar())!='\n' && c!=EOF);五种通讯方式总结
1.管道:速度慢,容量有限,只有父子进程能通讯
2.FIFO:任何进程间都能通讯,但速度慢
3.消息队列:容量受到系统限制,且要注意第一次读的时候,要考虑上一次没有读完数据的问题
4.信号量:不能传递复杂消息,只能用来同步
5.共享内存区:能够很容易控制容量,速度快,但要保持同步,比如一个进程在写的时候,另一个进程要注意读写的问题,相当于线程中的线程安全,当然,共享内存区同样可以用作线程间通讯,不过没这个必要,线程间本来就已经共享了同一进程内的一块内存。

