
热门标签
热门文章
- 1el-table 中数据嵌套绑定_el-table绑定数据
- 2Vue3中使用TDesign添加动态表单校验_t-form-item
- 3神经网络基础-线性模型_线性神经网络模型
- 4Spring Boot定义类处理API通用返回数据
- 5已知m,n是正整数,编写程序求m中取n的组合数_出题人: 描述 输入两个整数m,n,求m个数字中选n个数的组合数。(1<=n<=m<=100)
- 61、串口(UART/COM/TTL/RS232/RS485)
- 7无人机智能巡检系统及功能介绍_基于无人机巡检的红外监测管理系统使用手册
- 8基础省选+NOI-第6部分 字符串_省选noi级的字符串
- 9Python中读取txt文本出现“ 'utf-8' codec can't decode的解决方法*_python utf8 codec cant decode
- 10基于Python的人脸识别考勤管理系统的设计与实现_基于人脸识别的考勤系统
当前位置: article > 正文
复现urdf到gazebo过程以及实现gazebo+simulink通信_gazebo simulink
作者:从前慢现在也慢 | 2024-04-22 07:16:02
赞
踩
gazebo simulink
1、这一篇(6)博客存在两个问题,第一个就是新建的urdf无法在moveit里面装配问题。
后来发现因为stl文件都加密了,所以一直不能加载
2、这篇就从新的urdf开始
把生成的urdf拖动到ubuntu里面
**
首先
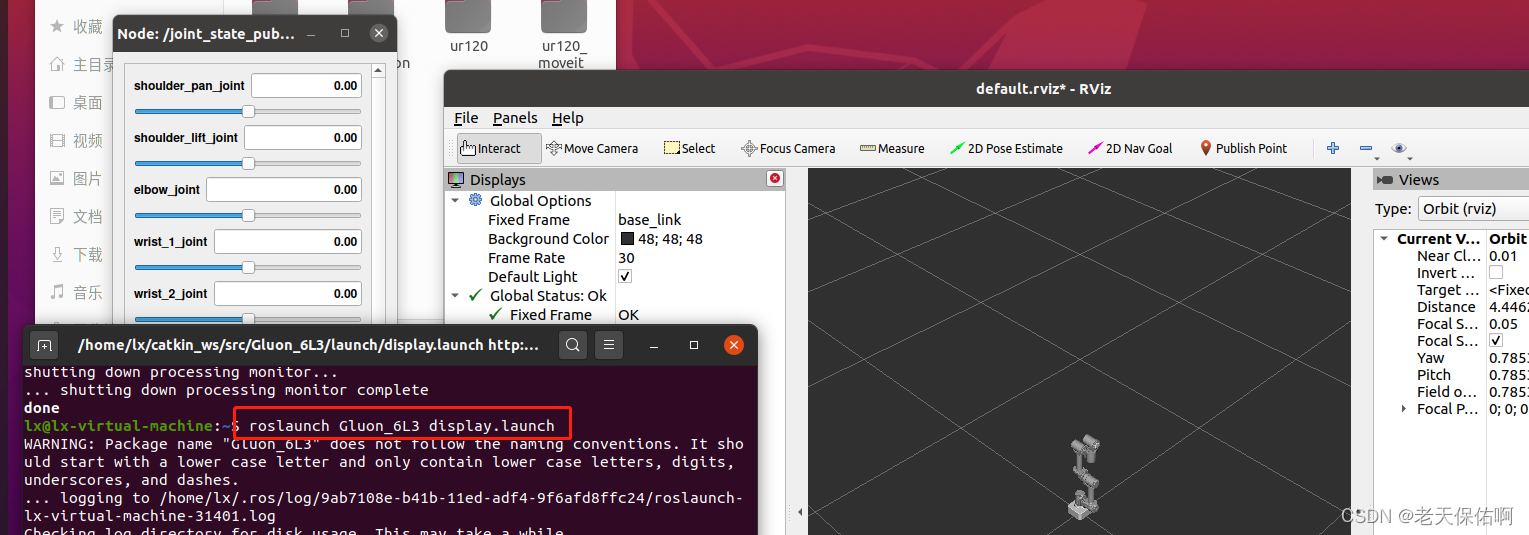
**测试一下urdf是否可以正常在rvzi打开
参考:这个博文
输入代码
roslaunch Gluon_6L3 display.launch
- 1
,然后安装博文加载模型就可以啦,结果如下:
接着
参考:博文
打开urdf文件,添加如下代码
<gazebo>
<plugin filename="libgazebo_ros_control.so" name="ros_control">
<!--robotNamespace>/</robotNamespace-->
<!--robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType-->
</plugin>
</gazebo>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
和
<transmission name="shoulder_pan_joint_tran">
<type>transmission_interface/SimpleTransmission</type>
<joint name="shoulder_pan_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="shoulder_pan_joint_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
然后
运行
roslaunch moveit_setup_assistant setup_assistant.launch
- 1
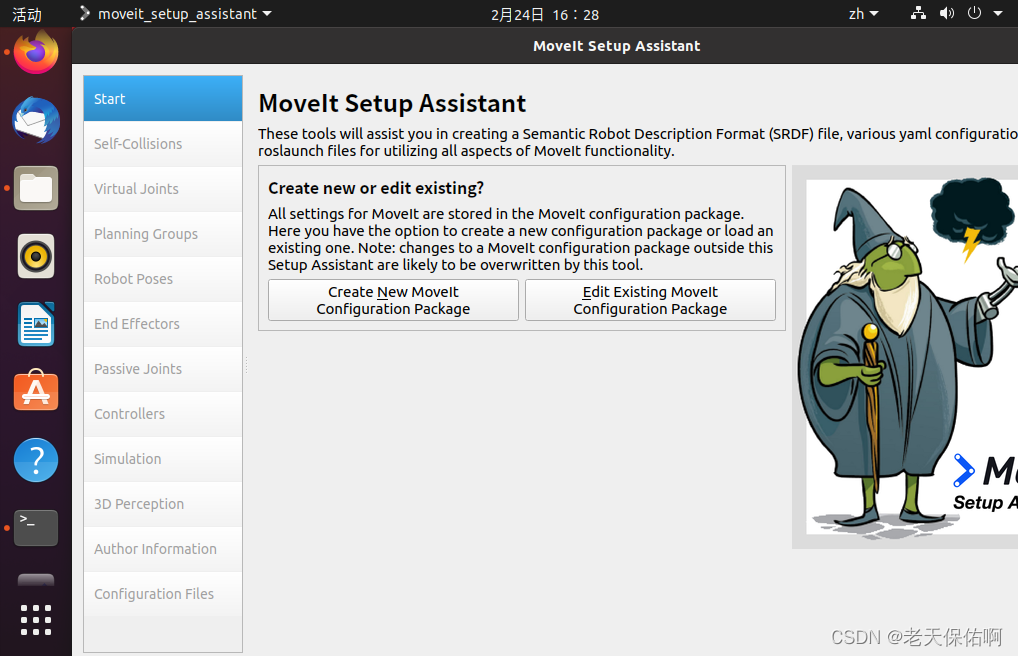
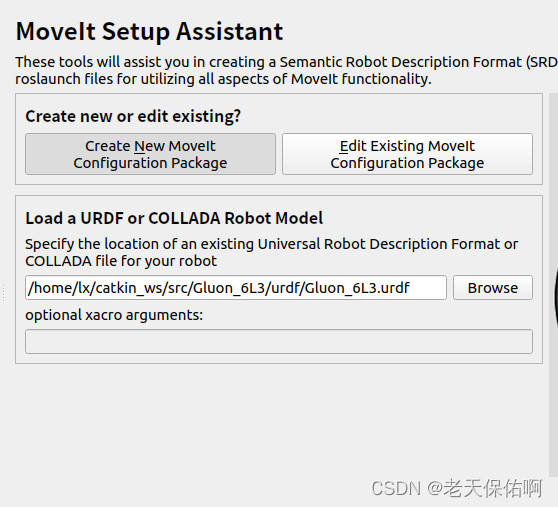
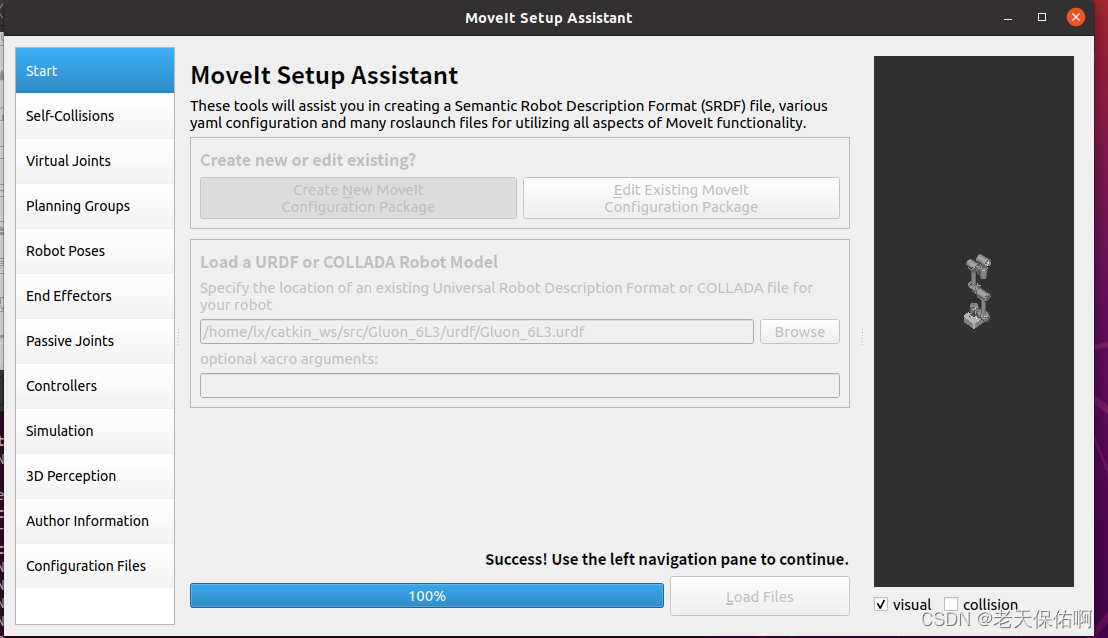
然后 配置moveit
参考博文:这一篇
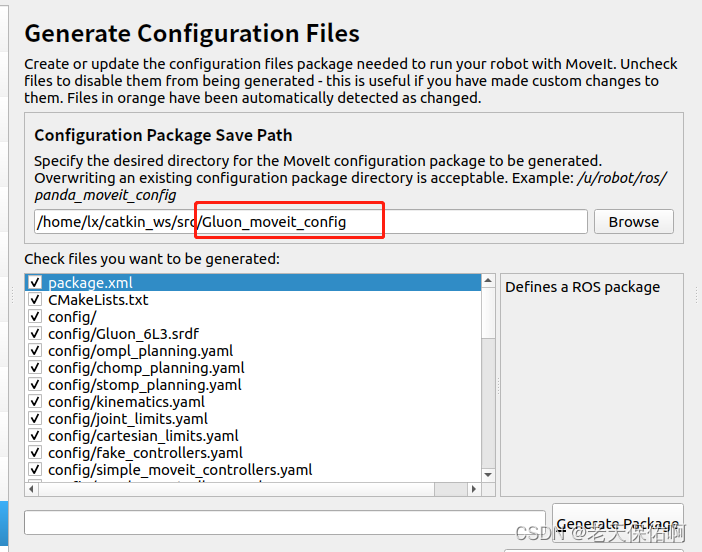
最后一步,新建一个空白文件夹,名称如红框,类似
回到urdf文件
输入,固定
<link name="world"/>
<joint name="fixed" type="fixed">
<parent link="world"/>
<child link="base_link"/>
</joint>
- 1
- 2
- 3
- 4
- 5
打开~/catkin_ws/src/Gluon_moveit_config/config/ros_controllers.yaml
controller_list:
- name: arm_position_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- shoulder_pan_joint
- shoulder_lift_joint
- elbow_joint
- wrist_1_joint
- wrist_2_joint
- wrist_3_joint
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
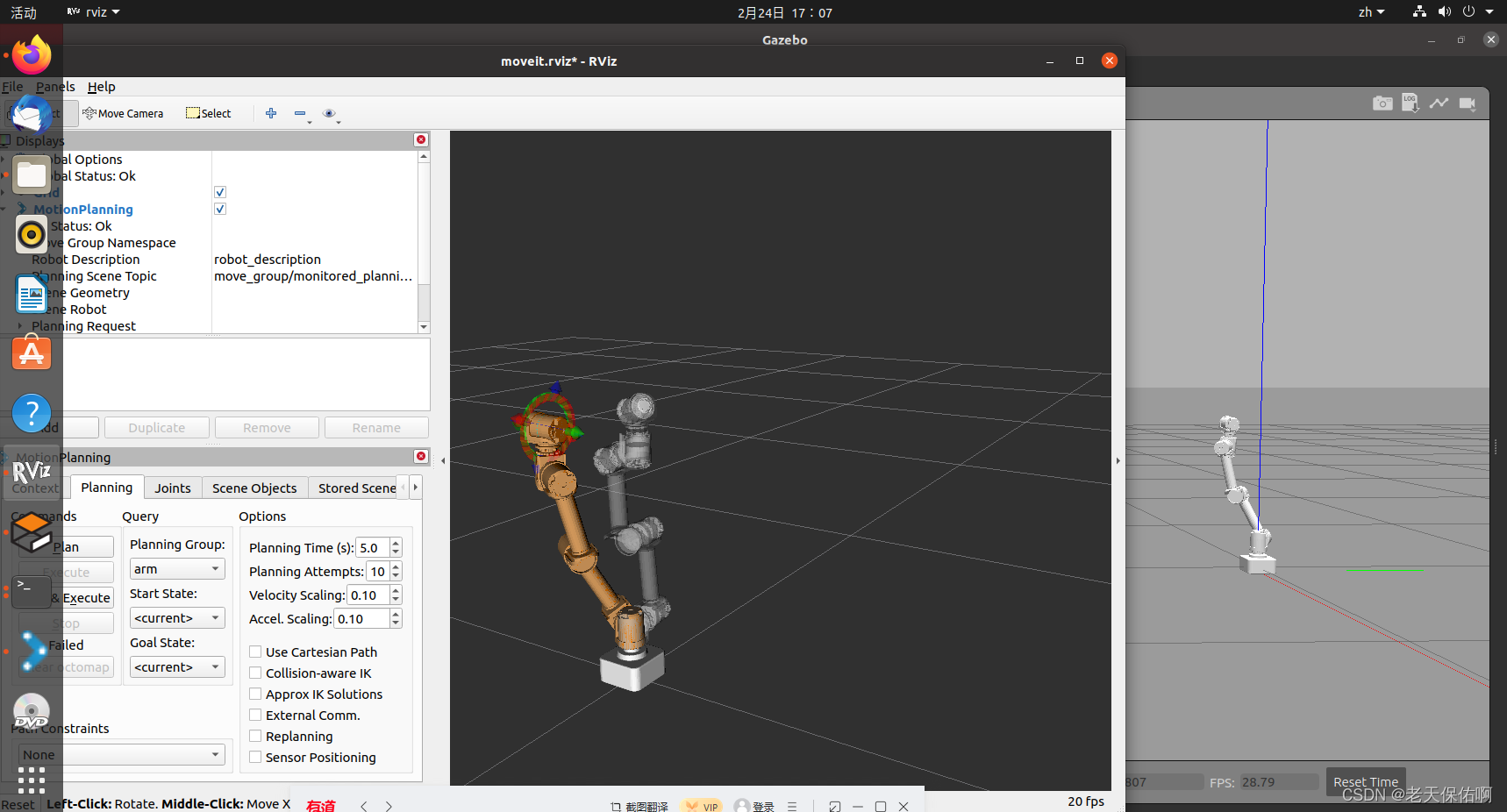
运行
roslaunch Gluon_moveit_config demo_gazebo.launch
- 1
结果如下
测试simulink和gazebo通信
参考:第二部分
moveit assistant得到的Gluon_moveit_config里面修改gazebo.launch和demo_gazebo.launch
empty.world全部用自己的simulink.world替换
然后运行(这里就不显示rviz了,就跑一个)
roslaunch Gluon_moveit_config gazebo.launch
- 1
在matlab打开要运行的simulink
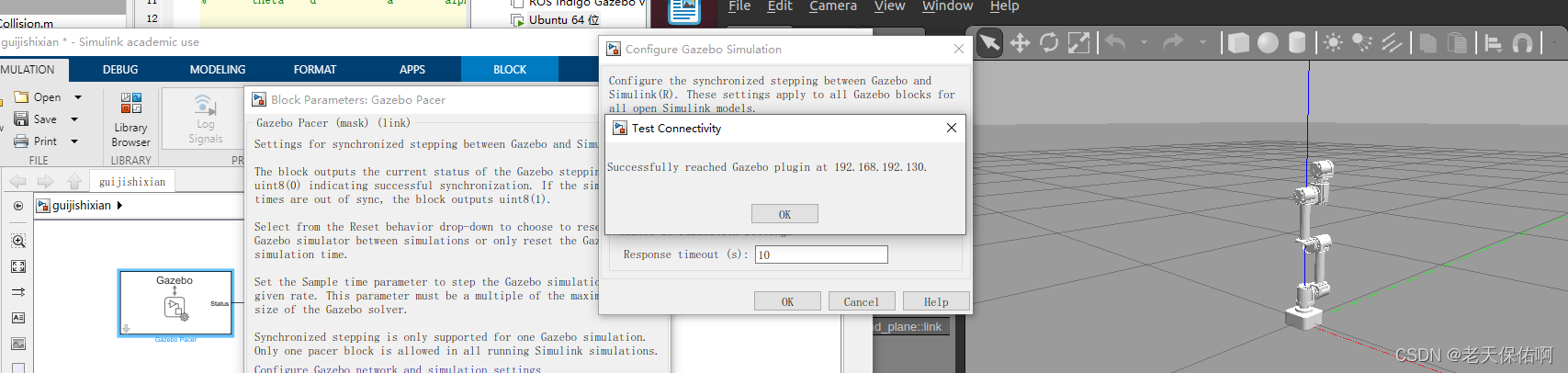
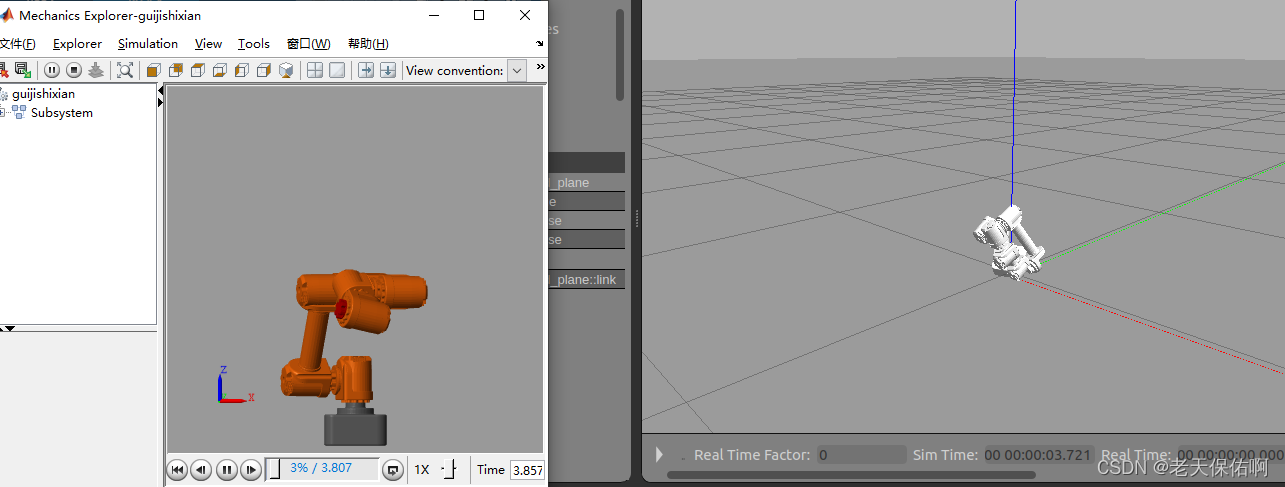
点击运行
还是有这个问题,gazebo模型乱飞
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/467429
推荐阅读
相关标签

