
- 1教您如何三分钟搞定EasyExcel导入与导出功能_easyexcel 导出
- 2学习资源分享_kafka 核心技术与实战百度网盘
- 3php表白情话,情商高的聊天语句900句 表白情话最暖心一段话
- 4OAuth2与JWT的区别JWT的适用场景及好处(九)_jwt和oauth2哪个好
- 5Node.js -- 包管理工具
- 6【算法|贪心算法系列No.4】leetcode55. 跳跃游戏 & 45. 跳跃游戏 II
- 7Docker的网络模式之host模式_docker run --host
- 8Kafka核心技术与实战 15 消费者组
- 9Kimi创始人套现4000万美元疑云|「商汤」大模型一体机可节约80%推理成本,完成云端边全栈布局|中国AI活化石,熬成AIGC第一股| 谁在制造小米汽车?_商汤 kimi
- 10Unity 之 NGUI UIRoot 的屏幕适配问题_ngui 适配
陀螺仪传感器建模与卡尔曼姿态解算_陀螺仪角度计算公式
赞
踩
陀螺仪传感器建模与卡尔曼姿态解算
说到姿态解算,目前用到最多的应该是“六轴加速度陀螺仪传感器+卡尔曼滤波算法”。网上的代码和卡尔曼滤波算法的教程很多,但大多数都是分开的两块,很少有将其结合在一起的。
本篇博客重点解释陀螺仪加速度计传感器在姿态解算方面如何建立模型,以及如何编写相应的代码。
一.模型建立
对于角度计算,我们有如下公式:

其中 为陀螺仪测得的角速度
由于现实中陀螺仪存在漂移,所以对上式进行修正如下

其中Gyro为陀螺仪静态漂移
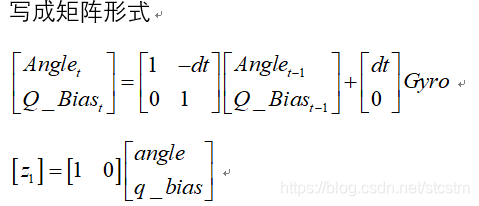
由此我们建立状态方程:

状态量:

测量量:

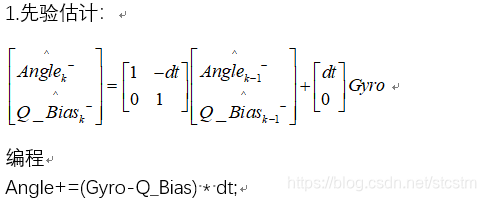
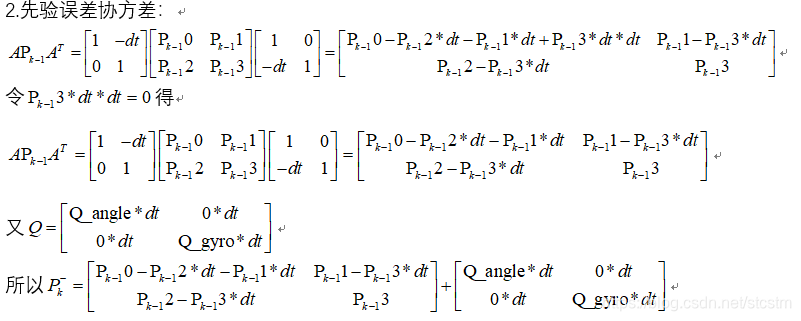
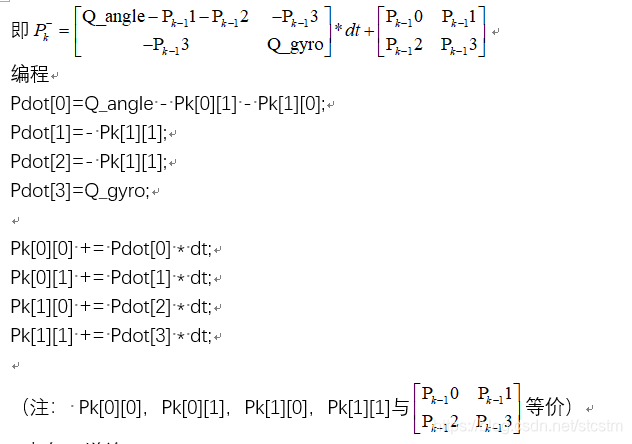
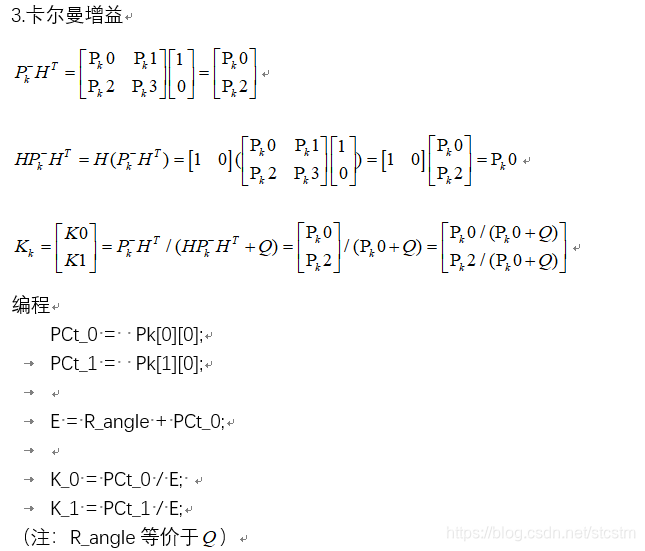
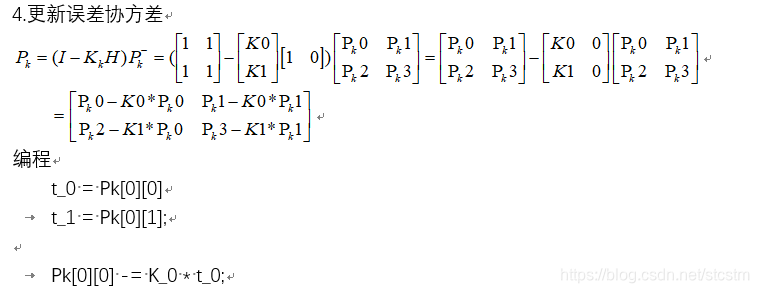
二.卡尔曼5个公式

三。编程(C语言)


至此,陀螺仪加速度计的建模和编程工作全部完毕,代码摘至网络,本人只是将其与书本中公式结合,希望对读者有所帮助
附:(完整代码)
`//Kalman滤波//
//-------------------------------------------------------
static float Q_angle=0.001, Q_gyro=0.001, R_angle=5, dt=0.004;
//Q增大,动态响应增大
static float Pk[2][2] = { {1, 0}, {0, 1 }};
static float Pdot[4] ={0,0,0,0};
static float q_bias=0, angle_err, PCt_0, PCt_1, E, K_0, K_1, t_0, t_1;
//-------------------------------------------------------
void Kalman_Filter(float angle_m,float gyro_m)
{
Angle+=(gyro_m-q_bias) * dt; ///预测值
Pdot[0]=Q_angle - Pk[0][1] - Pk[1][0];
Pdot[1]=- Pk[1][1];
Pdot[2]=- Pk[1][1];
Pdot[3]=Q_gyro;
Pk[0][0] += Pdot[0] * dt; Pk[0][1] += Pdot[1] * dt; Pk[1][0] += Pdot[2] * dt; Pk[1][1] += Pdot[3] * dt; angle_err = angle_m -Angle;///测量值-预测值 PCt_0 = Pk[0][0]; PCt_1 = Pk[1][0]; E = R_angle + PCt_0; K_0 = PCt_0 / E; ///卡尔曼增益 K_1 = PCt_1 / E; t_0 = PCt_0; t_1 = Pk[0][1]; Pk[0][0] -= K_0 * t_0; Pk[0][1] -= K_0 * t_1; Pk[1][0] -= K_1 * t_0; Pk[1][1] -= K_1 * t_1; Angle+= K_0 * angle_err; ///最优角度=预测值+卡尔曼增益*(测量值-预测值) q_bias += K_1 * angle_err; Angle_Speed = gyro_m-q_bias;

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
}`

