
- 1区块链+长三角一体化国家战略+科创板,上海向全球区块链行业发出邀请_上海区块链技术协会
- 2git下载安装配置及Git在Gitee上拉取和上传代码教程_gitee安装拉取代码步骤
- 3git push的时候忽略某些文件配置_git push忽略某些文件
- 4Docker 安装,基本命令_安装docker命令
- 5VCS 详解1_vcs -cflags
- 6wav是什么格式?什么播放器可以打开wav?_wav怎么打开
- 7【热门技术】一文详细解读云计算_一文讲明白云和虚拟机
- 8Connection activation failed: The connection is not for this device重启网络,报以下错误_添加网卡,重启netwoek 报错the connection is not for this de
- 9【开源数据集】智慧城市之CCPD车牌数据集_ccpl数据集
- 10Git的Patch功能_git中patch 是啥
3D车道线调研_3d车道线是什么意思啊
赞
踩
车道线(非多摄)
为啥使用车道线?
车道线的识别后的功能演进顺序:
-
车道线偏离预警(L0)

-
车道线保持(L1)

-
车道线居中(L2)

-
自动变道辅助(高阶)

车道线输出的方法
车道线检测任务定义
车道线检测任务就是对当前行驶道路的车道线进行检测,给出自车道及左右两侧至少各一个车道的相关信息,如车道的ID、方向、曲率、类型(虚线、实线、黄线、白线等)、宽度、长度、速度等信息,并进行可视化输出
难点
- 车道线一般为细长形的外观结构,需要强大的高低层次特征融合来同时获取全局的空间结构关系和细节处的定位精度;
- 车道线的状态呈现具有不确定性,如被遮挡、磨损、道路变化时本身的不连续性、天气影响(雨、雪)等。需要网络针对不同情况具备较强的推理能力;
- 车辆的偏离或换道过程会产生自车所在车道的切换,车道线也会发生左/右线的切换。一些提前给车道线赋值固定序号的方法,在换道过程中会产生歧义的情况;
当前方法
物体检测(Line-CNN、LaneATT)

车道分类(行分类E2E-LMD、IntRA-KD、UFAST、UFLD)

车道分割(yolop多任务)

存在问题

改进方案
其一,车道线具有细长的形态特征,这种形态要求追踪具备连续性,甚至包含一定的图像拼接技术。相应的检测手段需要参照不同的层次划分机制来获取全局空间结构关系,对于细节处的定位精度也可采用角点检测的方式进行。
其二,车道线的形态容易受到外界干扰(比如被遮挡,磨损,以及道路变化时本身的不连续性),存在较多不确定性。解决办法是采用较强推测能力的算法针对边缘情况进行推测。
其三,在启动驾驶辅助功能(如自动换道、车道保持期间)期间,自车会在车轮压线过程中发生车道线左/右切换的情况。解决办法除了设定滤波延迟外,也可以通过提前给车道线赋值固定序号的方法进行优化
3D车道线
误差分析
坐标误差(参数标定导致)

求解:

最终的预测3D坐标误差与动态外参关系如下:

结构化特征误差



3D车道线检测方法
对于上坡和下坡路口的坐标系:

没有地面模型gt和feature会不匹配:

模型结构上:

前视图片特征提取+俯仰角&相机安装高度预测,得到IPM的预测参数后,投影到bev空间完成检测相关任务

(1)使用图像语义分割网络预测车道线mask
(2)使用反透视映射(IPM)模块将mask转换为top-view(需要相机内参矩阵)
(3)在virtual top-view中预测车道线

地图语义信息+每个像素点的depth预测和offset

基于transformer方法:其核心是学习从前视图到BEV空间的空间特征转换,关注参考点周围的局部环境,在目标点生成的BEV特征将更具代表性;PersFormer由自注意模块组成,用于与本身BEV查询进行交互;交叉注意模块从基于IPM的前视图特征中获取key-value对,生成细粒度BEV特征。

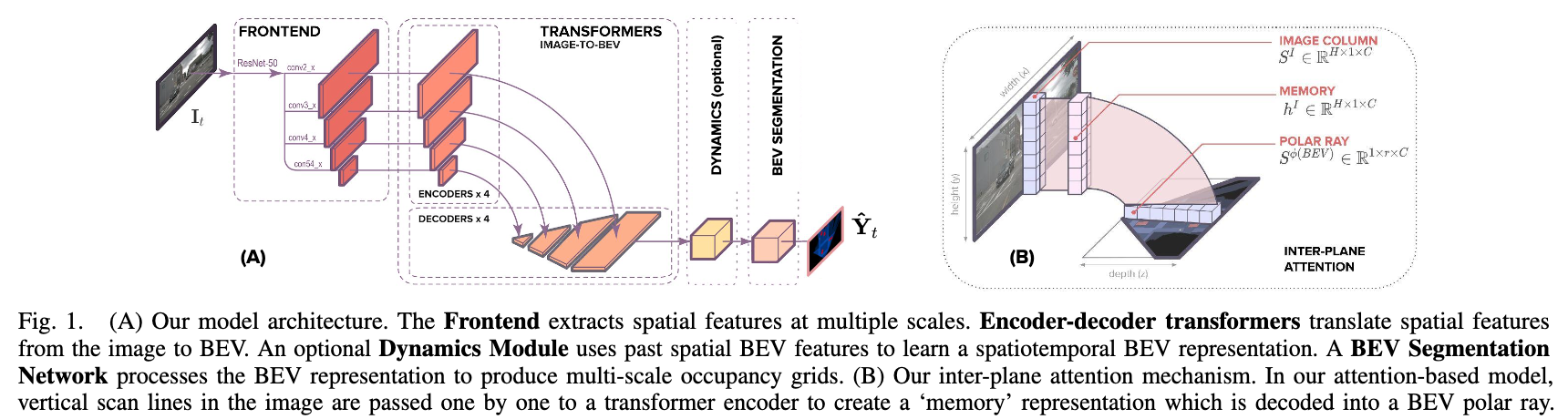
Translateing images into maps 发现,无论深度如何,在图像上同一列的像素在 BEV 下均沿着同一条射线,因此,可以将每一列转换到 BEV 构建 BEV feature map。作者将图像中每一列 encode 为 memory,利用 BEV 下射线的半径 query memory,从而获得 BEV feature,最后通过数据监督使模型拥有较好的视角转换能力
代码链接:
- LATR
- Gen-LaneNet
转换能力
代码链接:

