
- 1冒泡排序、快速排序算法理解及C程序实现_实现冒泡排序和快速排序算法主函数怎么写
- 2VM映像构建实践
- 3启动hive时:Hive Failed to connect to the MetaStore Server
- 4CRC校验 串行 并行 长除 移位 查表 矩阵_crc校验矩阵
- 5Hadoop应用案例分析_hadoop 案例
- 6tiny-cnn安装教程_tiny-dnnvc编译
- 7ESP32 WiFi Mesh开发(一):ESP WiFi Mesh简介(译文)_esp32 wifi mesh开发(一):esp wifi mesh简介(译文
- 8网络资源模板--基于 Android Studio 实现的新闻App_android studio新闻客户端制作
- 9Typora+picGo(Gitee)管理图床_gitee图床如何管理图片
- 10docker desktop使用入门_docker tablebook 使用
qnx系统学习_qnx学习
赞
踩
一 QNX概述
QNX实时操作系统,采用微内核和基于消息的进程间通信。
QNX的系统进程包括:
ProcessManager,FilesystemManager,DeviceManager,NetworkManager
1 进程间通信IPC:
1)消息Message,QNX最基本的IPC,提供进程间同步通信,发送者和接受者有应答
服务器 ChannelId = ChannelCreate(Flags);
客户端 ConnectionId = ConnectAttach(Node, Pid, Chid, Index, Flag);
Node标识机器号,如果客户端与服务器在同一台机器里时,=0,或=ND_LOCAL_NODE;
pid标识该服务的进程号;
chid就是服务器调用 ChannelCreate()后得到的channelId频道号了。
基本上客户端就是同"Node这台机器里的,Pid这个进程的,Chid频道"做一个连接。有了连接以后,就可以进行消息传递了。因为一个进程可能有多个线程,channelID就是为了标识进程中的线程。
连接的终止是ConnectDetach(),channel的结束则是ChannelDestroy()了。不过,一般服务器都是长久存在的,较少需要ChannelDestroy()。
服务器 ReceiveId = MsgReceive(ChannelId, ReceiveBuffer, ReceiveBufLength, &MsgInfo);
(... 检查Buffer里的消息进行处理 ...)
MsgReply(RceeiveId, ReplyStatus, ReplyBuf, ReplyLen);
客户端 MsgSend(ConnectionId, SendBuf, SendLen, ReplyBuf, ReplyLen);
(... 由OS将这个线程挂起 ...)
(... 当服务器MsgReply()后,OS 解除线程的阻塞状态, 客户端可以检查自己的 ReceiveBuf 看看应答结果 ...)
2)代理proxy,消息的一种特殊形式,适合事件通知,发送者不用和接收者交互
函数原型:
qnx_proxy_attach()创建proxy
Trigger()触发事件
3)信号signal,IPC的一种传统形式,通常用于一步IPC
shell环境下产生信号:kill,slay
进程内产生信号的C函数:kill(),raise()
相关函数:signal(),sigaction()
4 )跨网络IPC,通过虚电路机制实现(virtualcircuits),这种机制由QNX网络管理器完成。
相关函数:
qnx_vc_attach(0,qnx_name_locate()等
5 )基于信号灯的IPC
2 数据区与iov
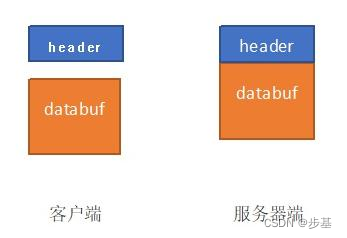
除了用线性的缓冲区进行消息传递以外,QNX还提供了用iov_t来“汇集”数据,可以一次传送几块数据。如下图:客户端蓝色的Header同红色的databuf是两块不相邻的内存,但传递到服务器端的ReceiveBuffer里,就是连续的。在服务器端,要想得到原来databuf里的数据,只需要(ReceiveBuffer + sizeof(header))就可以了。(要注意数据结构对齐)
客户端 SETIOV(&iov[0], &header, sizeof(header));
SETIOV(&iov[1], databuf, datalen);
MsgSendvs(ConnectionId, iov, 2, Replybf, ReplyLen); //"header" 与 "databuf" 是不连续的两块数据
服务器接收后, "header"与 "databuf"被连续地存在ReceiveBuffer里。 ReceiveId = MsgReceive(ChannelId, ReceiveBuffer, ReceiveBufLength, &MsgInfo);
header = (struct header *)ReceiveBUffer;
databuf = (char *)((char *)header + sizeof(*header));
3 资源管理器
一个资源管理器基本上来说就是一个服务器。在QNX上,“资源”可以是一个硬件(硬件资源管理器其实就是我们常说的硬件驱动),也可以是一种服务,比如TCPIP网络服务,或者ntfs文件系统服务;“资源”甚至可以是一个文件(或者目录)。
因为一个资源管理器都是由一个路经名作为入口的,而POSIX又定义了对一个文件可进行的操作,所以QNX预定义了这些操作所需要传递的消息类型和数据格式。QNX提供的资源管理器框架大致可以分成4个部份:
1) iofunc (iomsg) 层,提供了所有POSIX对文件可以进行的io操作 (sys/iofuncs.h, sys/iomsg.h)
| QNX总结了34个对文件操作,基本上POSIX对文件的处理,都可以通过这34个操作进行。iofunc层的每一个回调函数,都有一个对应的数据结构供客户端和服务器端进行消息传递,在sys/iomsg.h里 | |
| Connect Functions回调 | IO Functions回调 |
| open unlink rename mknod readlink link | read write close_ocb stat notify devctl unblock unblock mount pathconf lseek chmod chown utime openfd fdinfo lock space shutdown mmap msg umount dup close_dup lock_ocb unlock_ocb sync power |
比如 io_stat,
typedef union {
struct _io_stat i;
struct stat o;
} io_stat_t;
可以看到,io_stat是从客户端向服务器端发送一个 stauct _io_stat; 而服务器端返回的,直接就是一个 struct stat o; 这个struct stat, 就是 POSIX 的 stat() 函数取到的返回值。
2) resmgr层,提供了登记路径名,接收数据并分发给iofunc执行具体操作。iofunc 和 resmgr,是写一个资源管理器的基础。
如果 iofunc 层提供了各种回调函数的话,resmgr层就是那个“循环按收信息并调用iofunc”的那一层。例如:
resmgr_attach(….)
ctp = resmgr_context_alloc()
for (;;) {
ctp = resmgr_block(ctp);
resmgr_handler(ctp)
}
resmgr层和iofunc层给合,就可以搭建一个资源管理器。
- static int now_read(resmgr_context_t *ctp, io_read_t *msg, RESMGR_OCB_T *ocb)
- {
- iofunc_ocb_t *o = (iofunc_ocb_t *)ocb;
- char nowstr[128];
- time_t t;
- int n;
-
- /* 判断是不是文件 open 后第一次 read(),不是的话,回复0,这样客户端的 read()就会返回0,
- * 以示读到了文件尾
- */
- if (o->offset != 0) {
- return 0;
- }
-
- /* 取当前时间,写入字符串 */
- t = time(NULL);
- n = strftime(nowstr, 128, "%Y-%m-%d %H:%M:%Sn", localtime(&t));
-
- o->offset += n;
-
- /* 把字符串返回给客户端 */
- MsgReply(ctp->rcvid, n, nowstr, n);
-
- /* 告诉 resmgr 层,我们已经做过Reply了,不要再reply客户端了 */
- return _RESMGR_NOREPLY;
- }
-
- void main()
- {
- /* 建一个 dispatcher,这个可以想像就是一个接收数据的频道 */
- dispatch = dispatch_create();
-
- /* 资源管理器本身的一些参数,下面这个就是指定了资源管理器最多一次可以处理10个 iov_t */
- memset( &res_attr, 0, sizeof( res_attr ) );
- res_attr.nparts_max = 10;
- res_attr.msg_max_size = 0;
-
- /* io_attr 其实可以想像成一个文件相关的参数,比如读写权限等等 */
- iofunc_attr_init(&io_attr, 0666 | S_IFCHR, 0, 0);
-
-
- /* 初始化iofunc层回调 */
- iofunc_func_init( _RESMGR_CONNECT_NFUNCS, &connect_funcs,
- _RESMGR_IO_NFUNCS, &io_funcs );
-
- io_funcs.read = now_read;
-
- /* 建立起资源管理层,同时注册路径 */
- rmgid = resmgr_attach(dispatch, &res_attr, "/dev/now", _FTYPE_ANY, 0, &connect_funcs,
- &io_funcs,&io_attr);
-
- /* 准备一个资源管理层的 context 以备使用 */
- ctp = resmgr_context_alloc(dispatch);
-
- while (1)
- {
- /* resmgr_block() 相当于做了一个 MsgReceive() */
- ctp = resmgr_block(ctp);
-
- /* 根据收到的信息,调用相应的回调程序 */
- resmgr_handler(ctp);
- }
- }
-
- //执行后会生产一个/dev/now 的文件
3) dispatch层,在一些复杂的资源管理器里,“外来的消息传递”并不是唯一需要处理的。也有可能需要处理“脉冲”,或者有时候一个“信号”。dispatch层会主动识别不同的输入信息,然后转给不同的处理函数进行处理。
虽然大多数情况下,用iofunc层+resmgr层已经可以构建一个完整的资源管理器了,但是有时候资源管理器需要同时处理别的消息,这时就需要 dispatch 层了。dispatch可以处理其他形态的信息,除了可以用 resmgr_attch() 来挂接resmgr 和 iofunc以外,还可以做这些 (sys/dispatch.h):
- int message_attach(dispatch_t *dpp, message_attr_t *attr, int low, int high,
- int (*func)(message_context_t *ctp, int code, unsigned flags, void *handle),
- void *handle);
-
- 有时候资源管理器在使用标准的 iomsg 以外,还想要定义自己的消息类型,那就会用到这个message_attach(). 这个函数意思是说,如果收到一个消息,它的消息类型在 low 和 high 之间的话,那就回调 func 来处理。
-
- 当然,要保证 low/high 不会与 iomsg 重叠,不然就会有歧义。在 iomsg.h 里已经定义了所有的 iomsg 在 _IO_BASE 和 _IO_MAX 之间,所以只要保证 low > _IO_MAX 就可以了。
- pulse_attach()
-
- int pulse_attach(dispatch_t *dpp, int flags, int code,
- int (*func)(message_context_t *ctp, int code, unsigned flags, void *handle),
- void *handle);
-
- 有许多管理硬件资源的管理器(驱动程序),除了提供iomsg消息,来对应客户端的io请求以外,也会很常见需要接收“脉冲”来处理中断 (InterruptAttachEvent)。这时,用 pulse_attach() 就可以把指定的脉冲号(code),绑定到回调函数 func 上。
- select_attach()
-
- int select_attach(void *dpp, select_attr_t *attr, int fd, unsigned flags,
- int (*func)(select_context_t *ctp, int fd, unsigned flags, void *handle),
- void *handle);
-
- 很多资源管理器,在处理客户端请求时,还需要向别的资源管理器发送一些请求。而很多时候这些请求可能不能立即返回结果,通常情况下,可以用 select() 来处理,但第一我们无法使用会阻塞的select(),因为我们是一个资源管理器的服务函数,如果被阻塞无法返回,就意味着我们无法处理客户端请求了;第二我们也无法用 select() 轮询,因为我们一旦返回,就会进入 等待客户端消息的阻塞状态,没有新消息来时,不会退出阻塞状态,也就没有机会再去轮询 select()了。
- 在使用 dispatch时,进行特殊的 *_attach() 挂接以后,只要把resmgr层的几个函数替换成dispath层的几个函数 就可以了,比如这样:
-
- ctp = dispatch_context_alloc(dispatch);
- while (1)
- {
- ctp = dispatch_block(ctp);
- dispatch_handler(ctp);
- }
-
- dispath_block() 相当于阻塞并等待,而 dispatch_handle() 则根据不同的挂接,调用不同的回调函数进行处理。
- 另一个比较常用的dispatch函数是dispatch_create_channel()。有时候,你希望自己用 ChannelCreate()创建频道,而不是让dispatch_create()自动为你创建频道,就可以用这个函数。之所以需要自己创建频道,是因为有时候希望在频道上设一些特殊的标志(ChannelCreate() 的 flags)。
4)thread pool层,提供了一个线程池管理,可以配置实现多个线程进行资源管理。
上面这些用 while (1) 来循环处理消息的资源管理器,明显都是“单线程”资源管理器,一共只有一个线程来处理客户端请求。对于一些需要频繁处理客户请求的资源管理器,自然会想到用“多线程”资源管理器。基本就是用几个线程来执行上面的 while(1)循环。
线程池(Thread Pool)就是用来实现这个的。使用起来也比较简单,先配置 poot_attr,然后创建并启动线程池。
- memset(&pool_attr, 0x00, sizeof pool_attr);
- if(!(pool_attr.handle = dpp = dispatch_create())) {
- perror("dispatch_create");
- return EXIT_FAILURE;
- }
- pool_attr.context_alloc = dispatch_context_alloc;
- pool_attr.block_func = dispatch_block;
- pool_attr.handler_func = dispatch_handler;
- pool_attr.context_free = dispatch_context_free;
- pool_attr.lo_water = 2; //至少应该有多少线程需要在等待任务
- pool_attr.hi_water = 5; //最多这些线程可以等待任务
- pool_attr.increment = 2; //一次递增的线程数
- pool_attr.maximum = 10; //线程池里最多可以建多少线程
- tpp = thread_pool_create( &pool_attr, POOL_FLAG_EXIT_SELF)
- thread_pool_start( tpp );
-
- 说明:线程池一旦启动,首先会创建5个线程,都在 dispatch_block()上等待接受任务。
-
- 当有一个请求来时,1号线程为其服务,假设这个服务线程在服务过程中,还需要向别的线程请求数据,一时回不来,那就还剩下4个线程等待任务。
-
- 如些再来两个请求,我们会变成3个线程在进行服务,2个线程等待任务的情形。
-
- 这时,当第4个请求来时,又一个线程去进行服务,这时只有1个线程在等待任务了,比lo_water少,所以线程池会自动再新建 2 个(increment) 线程,把他们放在等待任务队列中。所以这时我们有4个线程在服务,3个线程在等待。
-
- 如果服务线程无法回收,而新的请求又进来,导致等待线程数又低于lo_water的话,那么,线层池还会继续增加线程以保证有足够线程在等待服务,但是服务线程数与等待线程数的和,不会超过10(maximum).
-
- 假如在4个线程服务,3个线程等待的状态下,有2个服务线程结束了服务,它们会被还回线程池,线程池就会把这2个线程继续放入等待队列。也就是变有还有2个服务线程,5个等待线程的状态。
-
- 现在,如果又有1个线程结束服务,回归线程池了。如果把这个线程再放入等待队列,那就会有6 个线程等待服务,这个超过了 hi_water,所以线程池会结束这个线程。这样,我们就会有1个线程在服务,5个线程在等待的情形,线程总数下降到了6。
4 HAM
HAM(High Availability Manager)是一个“智能看门狗”——一个高弹性的管理进程,它可以在系统服务或进程失败或不再响应时监视您的系统并执行多级恢复。作为一个自我监控的管理者,HAM对内部故障具有弹性。不管出于什么原因,如果HAM本身被异常地停止,它可以通过移交给一个称为“监护人”的镜像进程,立即并完全地重建自己的状态。简单说,可以用守护机制做进程保活的。HAM机制是QNX原生机制,通过监控进程状态做到进程的重启。
| entry 实体,可理解为进程 condition 条件,类似进程死亡这种时候 action 动作,类似重新启动等具体行为 |
- QNX启动HAM进程,HAM管理需要监控的进程。
- 可以直接执行ham以启动ham进程。
- 不需要使用ham时可通过hamctrl -stop 停止ham,也可以调用ham_stop()
- #include <stdio.h>
- #include <string.h>
- #include <stdlib.h>
- #include <thread>
- #include <chrono>
- #include <iostream>
- #include <process.h>
- #ifdef QNX
- #include <ha/ham.h>
- #endid
-
- int main(int argc, char** argv)
- {
- #ifdef QNX
- printf("HAM Prepar~\n");
- int status;
- char* inetdpath;
- ham_entity_t* ehdl;
- ham_condition_t* chdl;
- ham_action_t* ahdl;
- int inetdpid;
- // 新启一个进程
- inetdpath = strdup("/usr/bin/picherdemo/helloworld -D");
- // 连接HAM
- ham_connect(0);
- // 将进程交给HAM监控
- ehdl = ham_attach("inetd", ND_LOCAL_NODE, inetdpid, inetdpath, 0);
- if (ehdl != NULL)
- {
- //添加条件,当进程“death”时
- chdl = ham_condition(ehdl, CONDDEATH, "death", HREARMAFTERRESTART);
- if (chdl != NULL) {
- //添加动作,重启进程
- ahdl = ham_action_restart(chdl, "restart", inetdpath,
- HREARMAFTERRESTART);
- if (ahdl == NULL)
- printf("add action failed\n");
- }
- else
- printf("add condition failed\n");
- }
- else
- printf("add entity failed\n");
- //关闭与HAM的连接
- ham_disconnect(0);
- #endif // QNX
- while (true) {
- printf("Process id: %d\n ", getpid());
- std::cout << "Thread id:\n"<< std::this_thread::get_id();
- std::this_thread::sleep_for(std::chrono::seconds(5));
- }
-
- return 0;
- }
5 SLM
系统启动和监控:启动由许多必须按特定顺序启动的进程组成的复杂应用程序,下图是可以看到SLM在整个QNX BOOT的运行位置。
通常使用xml配置的方式来确定进程的启动顺序
- //根节点
- <SLM:system>
- //组件,可以有多个组件
- <SLM:component name="io-pkt">
- //指令--执行/sbin/io-pkt-v6-hc
- <SLM:command>/sbin/io-pkt-v6-hc</SLM:command>
- //执行指令需要的参数--ptcpip stacksize=8192
- <SLM:args>-ptcpip stacksize=8192</ SLM:args>
- //启动后等待--等待/dev/socket起来
- <SLM:waitfor wait="pathname">/dev/socket</SLM:waitfor>
- </SLM:component>
- <SLM:component name="ifconfig">
- //依赖项--需要依赖io-pkt起来后才能启动
- <SLM:depend>io-pkt</ SLM:depend>
- <SLM:command>/sbin/ifconfig</SLM:command>
- <SLM:args>en0 192.168.1.5 up</SLM:args>
- <SLM:waitfor wait="exits"></SLM:waitfor >
- </SLM:component>
-
- //由组件组成
- <SLM:module name="net-setup">
- //执行io-pkt
- <SLM:member>io-pkt</SLM:member>
- //执行ifconfig
- <SLM:member>ifconfig</SLM:member>
- </SLM:module>
- </SLM:system>
| SLM主要负责systemd中调节进程间启动依赖的任务。同时为了能够在当前component的依赖项异常退出时对整个依赖树做恢复,它有一些基本的崩溃检测和基本的恢复动作。比如:a进程依赖b进程,b进程依赖c进程。那么如果c进程异常退出,SLM会先stop b进程和a进程,然后依次重新启动c→b→a三个进程。但是它无法知道像b进程中有某个线程阻塞这样的情况。 而HAM则强调对某个或某几个进程的详细行为监控。比如通过心跳机制对具体的某几个线程进行精准监控,同时通过代码对恢复过程进行精细的控制。比如:你可以监控一个线程是否在按照一定频率发送心跳,如果它没有,你可以先尝试重启这个线程,比如调用pthread_cancel或者触发这个线程的退出条件等,如果这个动作失败了,你再尝试重启整个进程。这种细粒度的检测和恢复操作,SLM是做不到的。 |
二 命令用法
打印所有的日志信息:slog2info (程序中的日志都是用slog2info写入的)
打印特定的日志信息:slog2info -m 12334 (12334是程序中用sloginfo写的时候,自己定义的),这样就可以进显示12334的日志信息;
清除日志: slog2info -c (有时候日志信息太多,会先使用该命令将之前的日志信息清除,然后再使用sloginfo ,显示当前的日志信息)
实时显示日志信息:slog2info -w
slay 进程名 :结束进程 (注意是进程名,不是进程号)
pindin :显示当前运行的所有进程名及进程号
pidin |grep 进程名 :筛选我们想要的进程名
shutdown :重启QNX系统
注意:当有守护程序时,倘若我们将守护去掉,shutdown后仍能重启守护的程序,但仅会启动这一次,关闭终端就不会再守护程序了,程序就不会再被重启了。
当我们测试程序时,不想让程序自动启动,方法:
修改守护程序配置文件,将进程名赋值为0 -----》mytest=0; (ps: mytest=1;则是守护该进程)
或者将进程通过cp的方式重命名,然后将原可执行程序删除(因为不支持mv命令)
pfm :打开资源管理器(文件系统)
ped :打开文本编辑器
passwd 用户名 --->创建新用户,没有useradd命令, 键入passwd 用户名后,会让输入密码。
参考文章:

