
基于扩展卡尔曼滤波的SOC估计代码_扩展卡尔曼滤波估算soc
赞
踩
上篇文章讲解卡尔曼滤波如何估计SOC的原理、计算过程,这篇文章将上述过程变为代码展示出来。看完这篇文章您将能快速掌握基于matlab软件实现基于EKF估计SOC的具体代码。
导入数据
将电压、电流、初始SOC值导入
T=1; %采样时间为1s
N=20042/T; %总步长
x=zeros(3,N); %定义状态向量x,定义一个3行N列的零矩阵。
x(:,1)=[0;0;1]; %状态向量x初值设定,初始soc=1
I = xlsread('i.xlsx'); %读取电流数据
u = xlsread('v.xlsx'); %读取电压数据
soc = xlsread('soc.xlsx'); %读取soc数据
I = -I'; %将电流数据变成行向量,放电为正
u = u'; %将电压数据变成行向量
soc = soc'; %将soc数据变成行向量
time = 1:1:N;
Cap = cumtrapz(time, I);
Cn = 33.1;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
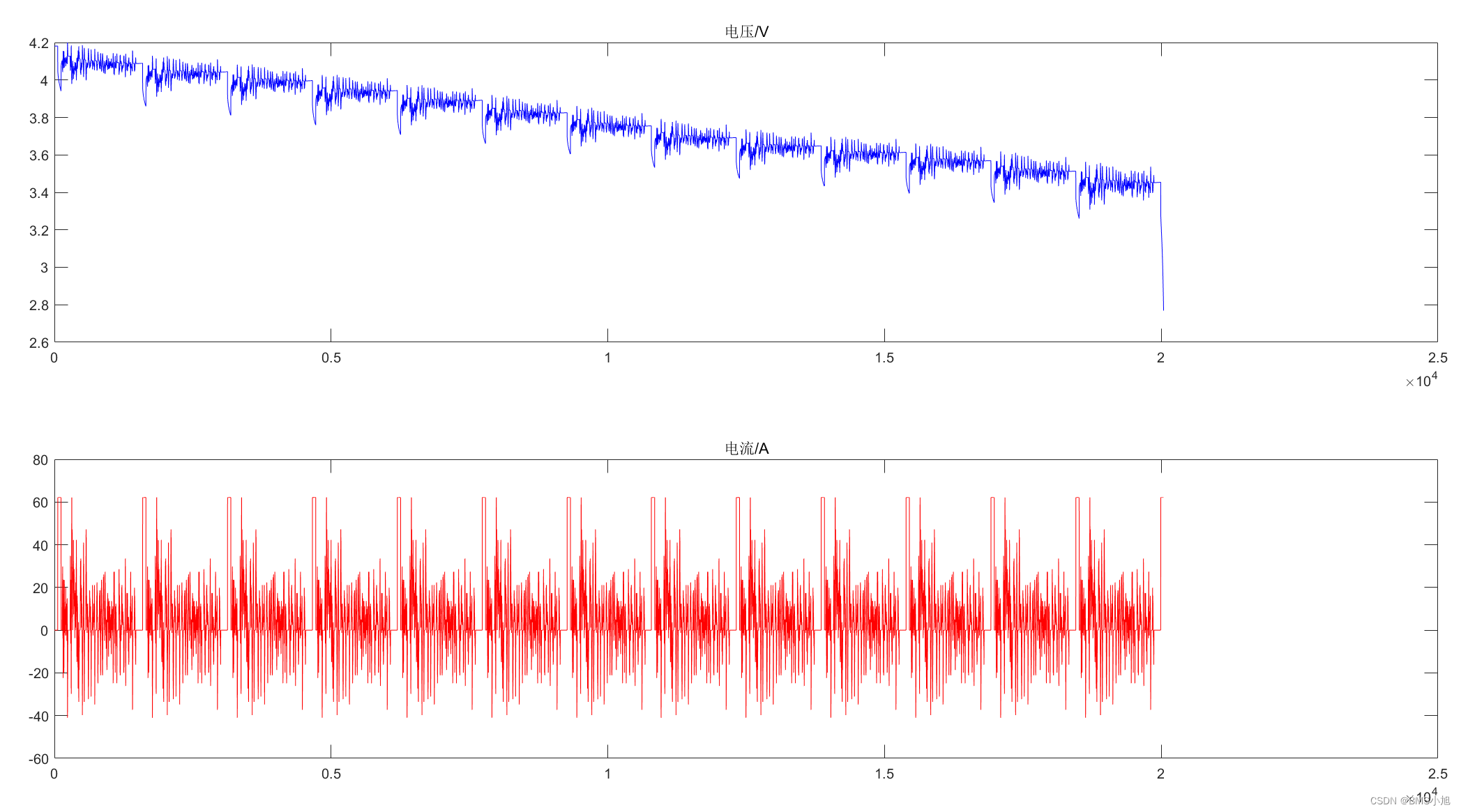
展示电压、电流图
OCV、二阶等效电路模型参数与SOC的关系
这些参数将在后续使用,由于这部分是可以提前单独完成的,因此单独说一下,如何获取这些参数与SOC的关系,在我之前的文章中已经详细介绍过了。链接:https://blog.csdn.net/a2267897749/article/details/134719450
SOC-OCV曲线
如何获取SOC-OCV曲线在我之前的文章已经介绍过,这里就不重复了,直接列出拟合后的多项式。
Usoc = 11.08*soc^6-25.58*soc^5+17.54*soc^4-1.159*soc^3-2.386*soc^2 + 1.263*soc+3.422; %开路电压Usoc是关于SOC的函数
- 1
RC参数与SOC的关系
% 阻容参数与SOC的关系
R1 = 0.03023*x(3,j-1)^6-0.1141*x(3,j-1)^5+0.1689*x(3,j-1)^4-0.1243*x(3,j-1)^3+0.04728*x(3,j-1)^2-0.008527*x(3,j-1)+0.0006967;
R2 = 0.003971*x(3,j-1)^6-0.005341*x(3,j-1)^5-0.006872*x(3,j-1)^4+0.01435*x(3,j-1)^3-0.007282*x(3,j-1)^2+0.001231*x(3,j-1)+0.0002082;
C1 = 510100*x(3,j-1)^6-1276000*x(3,j-1)^5+1031000*x(3,j-1)^3-176300*x(3,j-1)^2+69310*x(3,j-1)+909;
C2 = -12940000*x(3,j-1)^6+39640000*x(3,j-1)^5-45050000*x(3,j-1)^4+23320000*x(3,j-1)^3-5467000*x(3,j-1)^2+523200*x(3,j-1)+52340;
if I(1,:) >= 0 %R0区分充放电来拟合,也是关于SOC的函数
R0=(-0.1313*x(3,j-1)^3+0.4812*x(3,j-1)^2-0.5452*x(3,j-1)+2.96)/1000;%充电时欧姆内阻三阶拟合,除1000表示毫Ω化Ω
else
R0=(9.033*x(3,j-1)^6-39.36*x(3,j-1)^5+65.72*x(3,j-1)^4-54.46*x(3,j-1)^3+24.21*x(3,j-1)^2 -5.774*x(3,j-1)+2.58)/1000;%放电时欧姆内阻6阶拟合 除1000表示毫Ω化Ω
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
这其中的x就是上篇文章中的状态变量,x的第一行是U1、第二行是U2、第三行是SOC。 j 时刻的阻容参数由 j - 1 时刻的SOC决定,因此 x(3,j-1) 代表了上一个时刻的SOC,这个在之后的代码中会有更加深刻的体现。
基于EKF的SOC估计
卡尔曼滤波的超参数
卡尔曼估计中要先定义P、Q、R矩阵,这三个超参数可以很大程度上决定SOC估计结果的好坏,很多论文中的对比结果往往都暗改这个参数来修改结果。
P:决定卡尔曼滤波的收敛速度,越大则收敛速度越快
Q:过程噪声,过程噪声越小越信任安时积分过程
R:测量噪声,测量噪声越小越信任利用端电压获取的SOC结果
卡尔曼滤波过程
P=eye(3); Q = 0.00005; R = 1; for j = 2:N % 导入R、C与SOC的关系 R1 = 0.03023*x(3,j-1)^6-0.1141*x(3,j-1)^5+0.1689*x(3,j-1)^4-0.1243*x(3,j-1)^3+0.04728*x(3,j-1)^2-0.008527*x(3,j-1)+0.0006967; R2 = 0.003971*x(3,j-1)^6-0.005341*x(3,j-1)^5-0.006872*x(3,j-1)^4+0.01435*x(3,j-1)^3-0.007282*x(3,j-1)^2+0.001231*x(3,j-1)+0.0002082; C1 = 510100*x(3,j-1)^6-1276000*x(3,j-1)^5+1031000*x(3,j-1)^3-176300*x(3,j-1)^2+69310*x(3,j-1)+909; C2 = -12940000*x(3,j-1)^6+39640000*x(3,j-1)^5-45050000*x(3,j-1)^4+23320000*x(3,j-1)^3-5467000*x(3,j-1)^2+523200*x(3,j-1)+52340; if I(1,:) >= 0 %R0区分充放电来拟合,也是关于SOC的函数 R0=(-0.1313*x(3,j-1)^3+0.4812*x(3,j-1)^2-0.5452*x(3,j-1)+2.96)/1000;%充电时欧姆内阻三阶拟合,除1000表示毫Ω化Ω else R0=(9.033*x(3,j-1)^6-39.36*x(3,j-1)^5+65.72*x(3,j-1)^4-54.46*x(3,j-1)^3+24.21*x(3,j-1)^2 -5.774*x(3,j-1)+2.58)/1000;%放电时欧姆内阻6阶拟合 除1000表示毫Ω化Ω end H = 66.48*x(3,j-1)^5 - 127.9*x(3,j-1)^4 + 70.16*x(3,j-1)^3 - 3.48*x(3,j-1)^2.... - 4.58*x(3,j-1) + 1.26; A=[exp(-1/(R1*C1)) 0 0;0 exp(-1/(R2*C2)) 0;0 0 1];%系数矩阵A 3行3列 B=[R1*(1-exp(-1/(R1*C1))) R2*(1-exp(-1/(R2*C2))) 1/(3600*Cn)]';%系数矩阵B 3行1列 C=[-1 -1 H];%系数矩阵C 1行3列 %KF过程,理论过程见上一篇文章 xpre(:,j-1) = A*x(:,j-1)+B*I(1,j-1); %状态x的预测更新 Ppre = A*P*A'+eye(3)*Q; %协方差预测更新 K(:,j-1) = Ppre*C'*inv(C*Ppre*C'+R); %卡尔曼增益更新 Usoc = 11.08*xpre(3,j-1)^6-25.58*xpre(3,j-1)^5+17.54*xpre(3,j-1)^4-1.159*xpre(3,j-1)^3-2.386*xpre(3,j-1)^2.... +1.263*xpre(3,j-1)+3.422; %开路电压Usoc是关于SOC的函数 Um(1,j-1) = Usoc - xpre(1,j-1) - xpre(2,j-1) - I(1,j-1)*R0;%预测的电池端电压 e(1,j-1) = u(1,j-1)-Um(1,j-1);%新息 x(:,j) = xpre(:,j-1) + K(:,j-1)*e(1,j-1); P=(eye(3)-K(:,j-1)*C)*Ppre;%协方差更新 end

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
对A、B矩阵进行展开展开
上述过程已经完成了基于KF的SOC估计。为了减少指数运算带来的麻烦,对A、B矩阵进行线性化,提高运算速度。
A=[1-(1/(R1*C1)) 0 0;0 1-(1/(R2*C2)) 0;0 0 1]; %系数矩阵A 3行3列
B=[1/C1 1/C2 1/(3600*Cn)]'; %系数矩阵B 3行1列
- 1
- 2
SOC估计结果展示
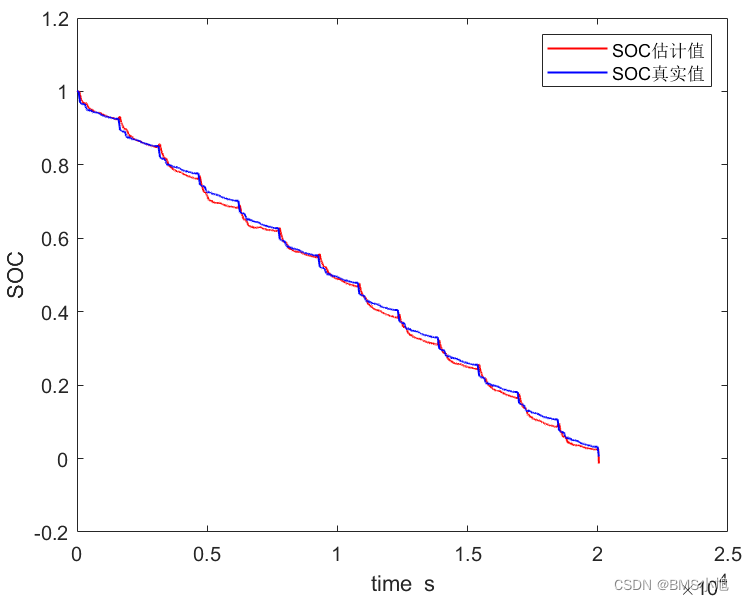
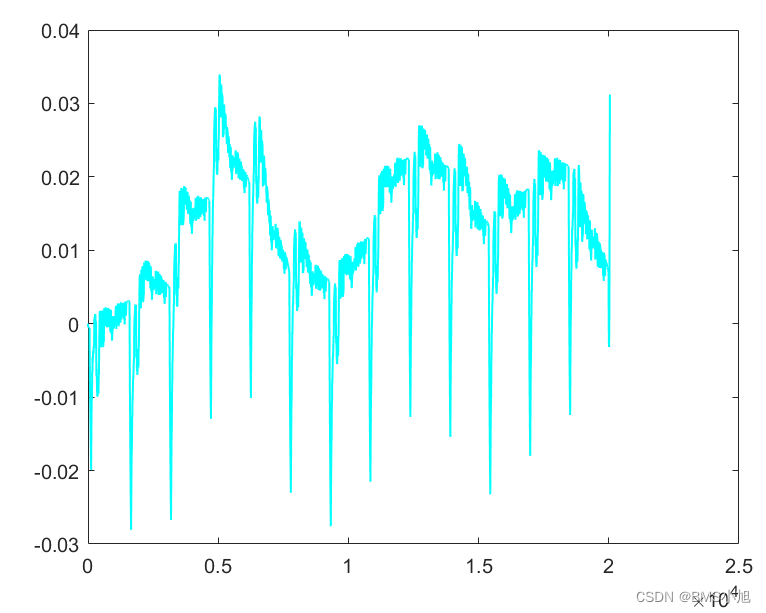
这样基于EKF的SOC估计的整个过程展示完毕。在实际BMS应用时往往会综合各种情况考虑,不会仅使用单一的算法。
本文主要介绍了基于卡尔曼滤波的SOC估计代码。
如果有什么问题交流可以留言或QQ:2267897749一起讨论,如果有您希望直接购买到可以直接使用的代码和数据,可以在闲鱼中搜索用户 BMS小旭 进行购买,价格十分便宜。

- wxml代码
... 赞
踩

