
热门标签
热门文章
- 1Spring Boot+WebSocket向前端推送消息
- 2web前端:从index.html开始_前端 index.html
- 3Serverless和PaaS之间就“差”了一个负载均衡
- 4如何使用 AutoDL 云实例基于LangChain-Chatchat 和 ChatGLM 搭建本地知识库模型详细教程(更新中)_langchain chatchat github
- 5CSS特性_css继承父级样式
- 6准备跳槽了(仍然底层为主,ue独立游戏为辅)
- 7AI网络爬虫:批量爬取豆瓣图书搜索结果
- 8QNX为什么是安全的操作系统?
- 9[数据结构] 基于选择的排序 选择排序&&堆排序
- 10VUE2用elementUI实现父组件中校验子组件中的表单_vue 详细子表 的校验
当前位置: article > 正文
ros2仿真学习04 -turtlebot3实现cartographer算法建图演示_turtlebot3 cartographer
作者:代码探险家 | 2024-07-24 22:09:22
赞
踩
turtlebot3 cartographer
安装看这里
https://blog.csdn.net/hai411741962/article/details/135619608?spm=1001.2014.3001.5502
虚拟机配置:
内存16g
cpu 4 核
磁盘40G,20G 不够
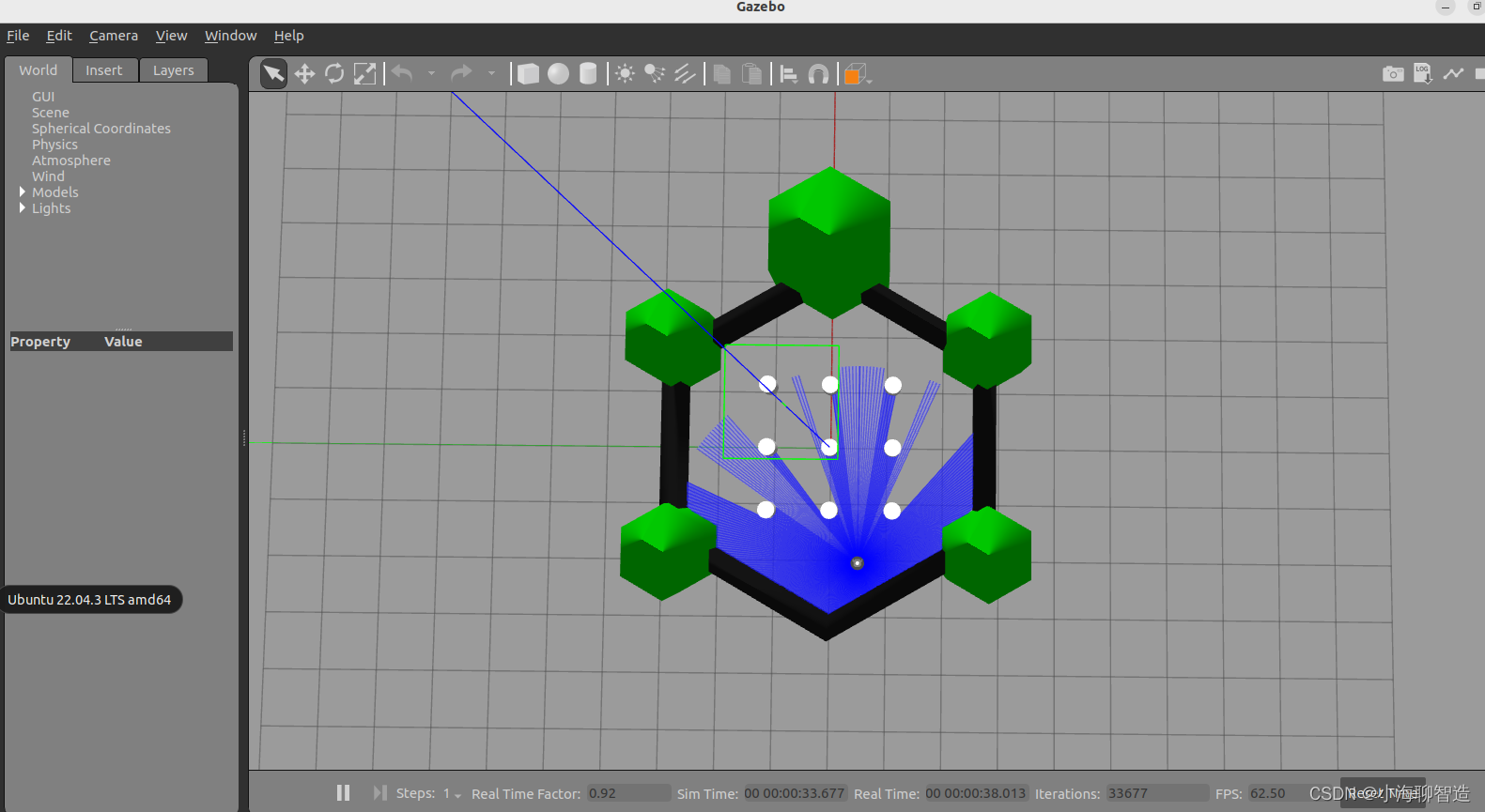
启动仿真
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- 1
启动成功如下
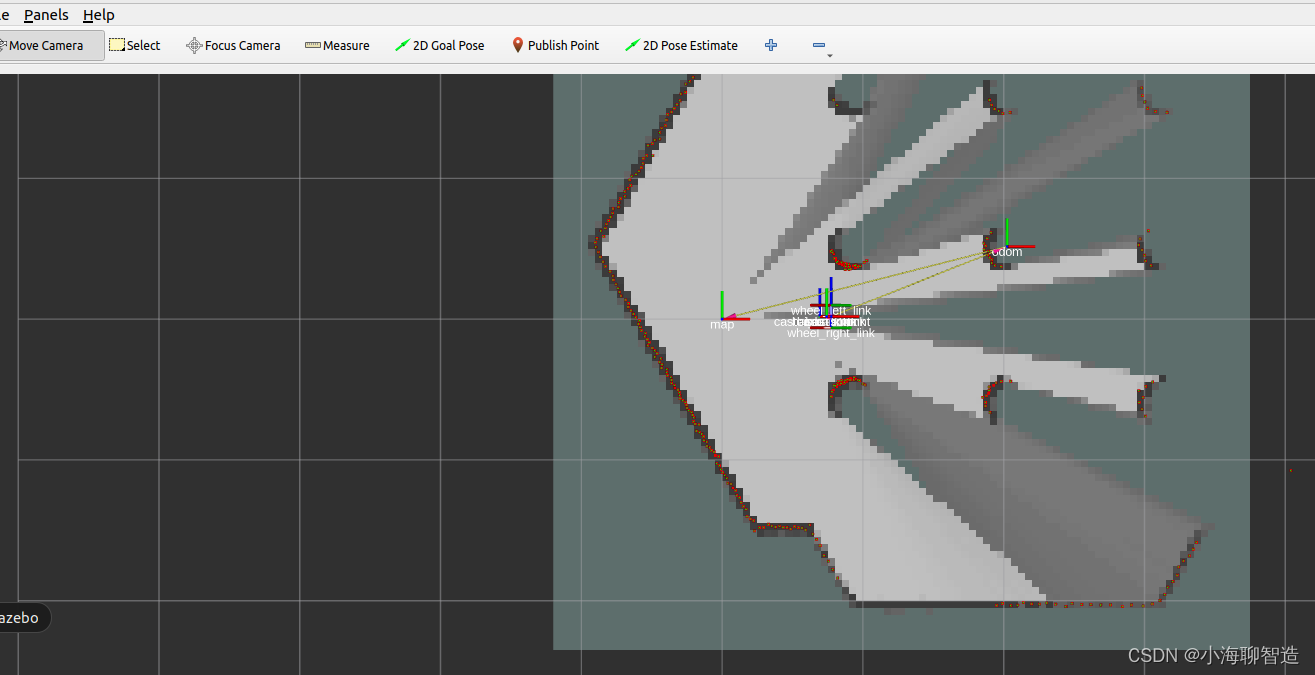
启动建图
重新开一个命令窗口:
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
- 1
启动成功后如下图

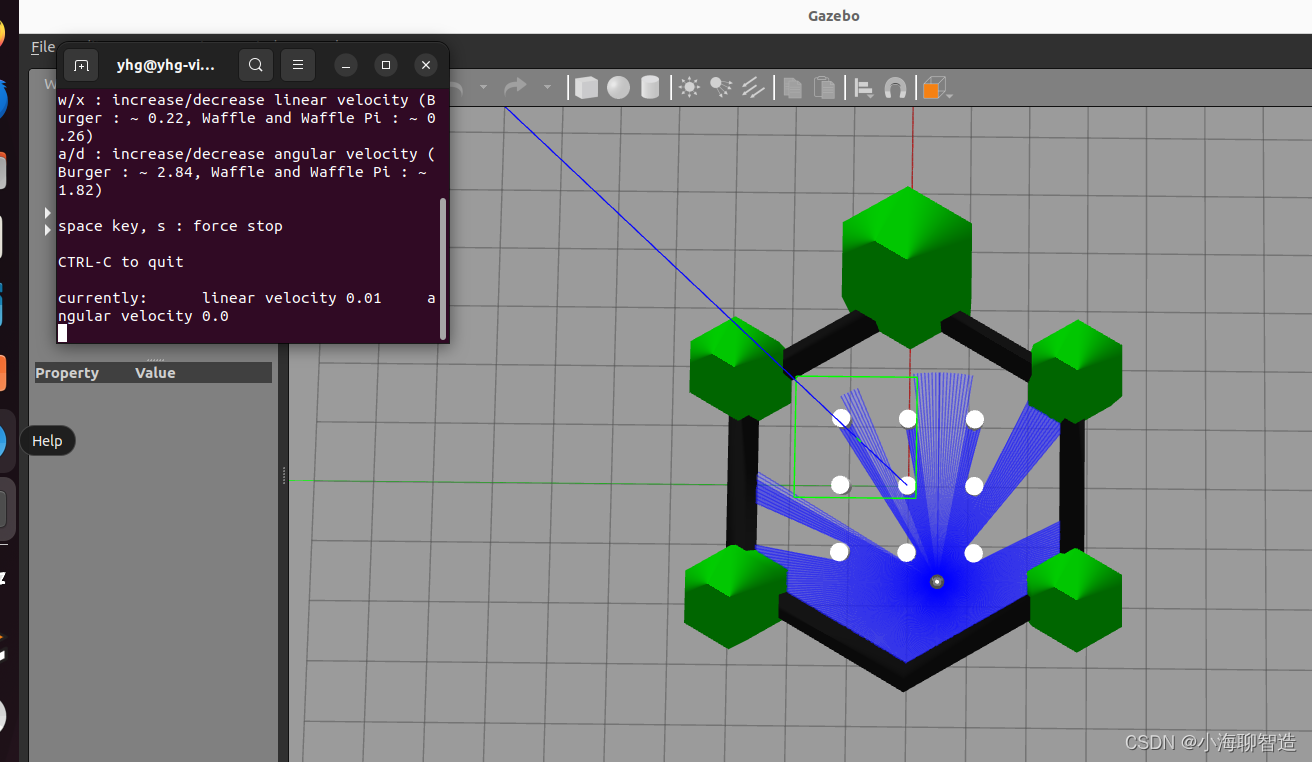
启动键盘
再开一个命令窗口输入
ros2 run turtlebot3_teleop teleop_keyboard
- 1
保持命令窗口在前,缩小操作键盘,可看到Gazebo 和 Rviz 的小车分别都在动了,也可以打开topic list 查看多了好些个topic
按下 w 就开始了
建图完成后,保存地图
保存地图
mkdir ~/map
- 1
ros2 run nav2_map_server map_saver_cli -f ~/map
- 1
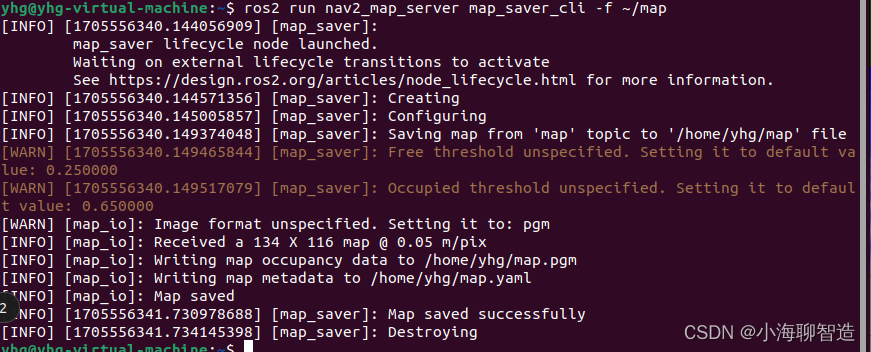
地图保存在~下,名为map.yaml,map.pgm
查看地图
eog ~/map.pgm
- 1
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/代码探险家/article/detail/876941?site
推荐阅读
相关标签

