
热门标签
热门文章
- 1正交试验法用例设计_正交试验设计
- 2十分钟上手小程序开发,史上最全的《入门级》小程序开发
- 3生成式 AI 简介
- 4基于Android及人工智能的智能旅行系统(一)_基于android的人工智能app
- 5【Qt】QT串口接收一帧数据有时候不完整,需要接收两次
- 6开源免费CasaOS:轻松打造高效便捷的家庭云生活新体验_rk3218 安装casaos
- 7服务器生产环境问题解决思路
- 8mysql utf8mb4 bin_Mysql的utf8与utf8mb4区别,utf8mb4_bin、utf8mb4_general_ci、utf8mb4_unicode_ci区别...
- 9手把手的教你使用Toolkit插件在诗情画意中完成AI诗朗诵
- 10vue前置知识
当前位置: article > 正文
ROS学习之二虚拟机中USB摄像头的安装及可能遇到的问题_ros2 找不到 usb_cam
作者:你好赵伟 | 2024-03-18 12:47:15
赞
踩
ros2 找不到 usb_cam
一.安装方式:
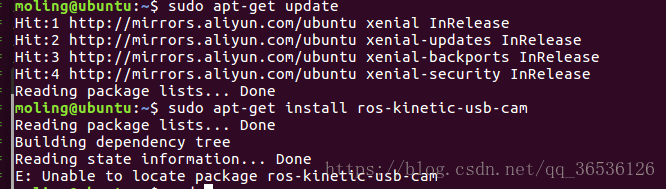
1.可以直接用apt-get install命令
$ sudo apt-get install ros-kinetic-usb-cam
用这个方法安装的时候如果出现如下问题:
就用下面的网上下载安装编译
2.网上下载编译安装
$ cd catkin_ws/src
$ git clone https://github.com/bosch-ros-pkg/usb_cam.git
$ cd ~/catkin_ws
$ catkin_make
二.启动摄像头:
usb_cam安装成功后,可以使用以下命令启动计算机摄像头,进行测试
$roslaunch usb_cam usb_cam-test.launch
测试成功后会弹出显示图像的可视化界面
三、遇到的问题
启动摄像头的时候可能会遇到如下的问题:
或者:

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/你好赵伟/article/detail/263149
推荐阅读
相关标签

