- 1头歌平台自建实践项目简易教程_头哥平台
- 2华为OD机试-传递悄悄话(Java&Python&Go)100%通过率_华为od机试传递悄悄话
- 3C++ & QT Creator 开发网络调试助手_网络调试助手源码c++
- 4【STM32】--基于STM32最小系统点亮LED灯
- 5python怎么创建一个文件夹,用python创建一个文件夹_python 创建文件夹
- 6vue+elementUI实现点击左右箭头切换按钮功能_element tabs 添加左右切换按钮
- 7MacOS安装多个Python版本导致Python3: Command not found_python3-config: command not found
- 8算法——马踏棋盘算法(骑士周游问题)/图的深度优先遍历+贪心算法优化
- 9吉林师范计算机考研真题,2021吉林师范大学考研历年真题
- 10C++ 函数调用的压栈过程_函数调用压栈过程 面试
ROS2机器人编程实践基础与应用-第七版-补充说明_ros机器人编程实战 pdf
赞
踩
相关中文教程推荐:
前3版关于ROS1的,已经在蓝桥云课中更新为主,学员数已经达到 14924 人:
已经公开的大纲第4版(2019年):
机器人编程实践-ROS2基础与应用-_zhangrelay的博客-CSDN博客

这是机器人编程实践的第4版课程说明,分别在2016年开设第一版,2017年第二版,2018年第三版,2019年第四版,每版课程内容经过2轮测试,非常感谢对课程提出宝贵意见的同学们以及热心的博客朋友。
前二版内容主要针对ROS 1.0分别是indigo/kinetic版本,第三版内容针对ROS 1.0 Melodic和ROS 2.0 Crystal融合,但依然侧重ROS 1.0并加入OpenAI等人工智能部分。但是第四版内容出现非常大的变动主要内容针对ROS 2.0 Dashing(第一轮测试完成,第二轮测试进行中)。
关于前三版更多详细信息:沉迷机器人操作系统的一个理由和四种修仙秘籍(含资料下载)
关于第四版补充资料:ROS2编程基础课程文档(含资料下载)
大纲第7版(2022年):

由于工作任务繁重,暂时不录制视频教程。
云班课中直播课程,也不会上传到任何公开视频网站上。
后续还是以图文博客为主。
嵌入式部分(micro-ros ESP32)+视觉部分(OpenCV)目前正在修订中,将补充到如下第7版中。
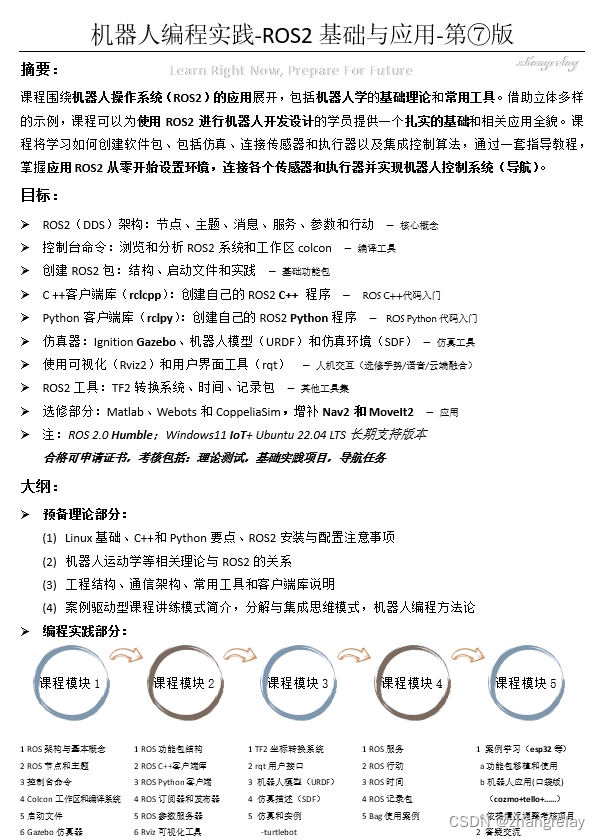
机器人编程实践-ROS2基础与应用-第⑦版
摘要: Learn Right Now, Prepare For Future
课程围绕机器人操作系统(ROS2)的应用展开,包括机器人学的基础理论和常用工具。借助立体多样的示例,课程可以为使用ROS2进行机器人开发设计的学员提供一个扎实的基础和相关应用全貌。课程将学习如何创建软件包、包括仿真、连接传感器和执行器以及集成控制算法,通过一套指导教程,掌握应用ROS2从零开始设置环境,连接各个传感器和执行器并实现机器人控制系统(导航)。
目标:
- ROS2(DDS)架构:节点、主题、消息、服务、参数和行动 – 核心概念
- 控制台命令:浏览和分析ROS2系统和工作区colcon – 编译工具
- 创建ROS2包:结构、启动文件和实践 – 基础功能包
- C ++客户端库(rclcpp):创建自己的ROS2 C++ 程序 – ROS C++代码入门
- Python客户端库(rclpy):创建自己的ROS2 Python程序 – ROS Python代码入门
- 仿真器:Ignition Gazebo、机器人模型(URDF)和仿真环境(SDF) – 仿真工具
- 使用可视化(Rviz2)和用户界面工具(rqt) – 人机交互(选修手势/语音/云端融合)
- ROS2工具:TF2转换系统、时间、记录包 – 其他工具集
- 选修部分:Matlab、Webots和CoppeliaSim,增补Nav2和MoveIt2 – 应用
- 注:ROS 2.0 Humble;Windows11 IoT+ Ubuntu 22.04 LTS长期支持版本
合格可申请证书,考核包括:理论测试,基础实践项目,导航任务
大纲:
- 预备理论部分:
- Linux基础、C++和Python要点、ROS2安装与配置注意事项
- 机器人运动学等相关理论与ROS2的关系
- 工程结构、通信架构、常用工具和客户端库说明
- 案例驱动型课程讲练模式简介,分解与集成思维模式,机器人编程方法论
- 编程实践部分:
|
课程模块1 |
|
1 ROS架构与基本概念 2 ROS节点和主题 3控制台命令 4 Colcon工作区和编译系统 5启动文件 6 Gazebo仿真器 |
|
课程模块2 |
|
1 ROS功能包结构 2 ROS C++客户端库 3 ROS Python客户端 4 ROS订阅器和发布器 5 ROS参数服务器 6 Rviz可视化工具 |
|
课程模块3 |
|
1 TF2坐标转换系统 2 rqt用户接口 3 机器人模型(URDF) 4 仿真描述(SDF) 5 仿真和实例 -turtlebot |
|
课程模块4 |
|
1 ROS服务 2 ROS行动 3 ROS时间 4 ROS记录包 5 Bag使用案例 |
|
课程模块5 |
|
1 案例学习(esp32等) a功能包移植和使用 b机器人应用(口袋版) (cozmo+tello+……) c依据情况调整考核项目 2 答疑交流 |
各类证书模板如下:
ROS机器人培训基地和暑期学校证书样例_zhangrelay的博客-CSDN博客_ros证书