
- 12022危险化学品经营单位主要负责人考试题库及模拟考试_生产经营运输储存使用危险物品或者处置废弃危险物品的行为可能构成
- 2K-Nearest-Neighbors_k nearest neighbor selects all features all a subs
- 35分钟轻松学Python:4行代码写一个爬虫(附零基础学习资料)_爬虫代码
- 4面试经验:字节跳动面试中的难题_字节常考hard题
- 5ERP&EIRP_eirp和erp区别
- 6驱动程序无法通过使用安全套接字层(SSL)加密与 SQL Server 建 立安全连接。错误-“PKIX path building failed-_sqlserver中ssl加密
- 7SpringBoot中进行简单的密码加密_springboot密码加密
- 8Springboot学习笔记(缓存介绍及缓存在springboot中的应用)_springboot如何使用缓存
- 9Java设计模式——单例模式_java单例模式
- 10百度地图js api 为覆盖物添加索引_百度地图覆盖物属性ja
STM32---IWDG(独立看门狗),超详细,小白入_stm32 iwdg
赞
踩
写在前面:本节我们学习STM32中一个很有趣的东西——看门狗,其实在我上大学的时候,当时还没有系统学习STM32的时候,就听到过看门狗这个词语,当时老师上课不断在说看门狗,只是觉得很有意思。但是没有真正了解过,今天同大家一起学习看门狗的内容。看门狗并不难,大家跟着我的思路学习即可。
一、IWDG简介
IWDG全称(Independent watchdog)独立看门狗。
本质:一个能够产生复位信号的计数器。
那么什么是复位信号呢?复位就是使MCU回到初始状态。对于单片机来说,开机的时候需要复位,以便使得CPU和其他功能部件处于一个正确的初始状态,并以此为起点开始工作,当出现死机的情况也应当对其进行复位,用以摆脱死机状态。
系统复位方式共有5种,分别为:
1、硬件复位。
2、WWGD复位。
3、IWDG复位。
4、软件复位。
5、低功耗复位。
独立看门狗复位:这种方式使用独立的看门狗来监控单片机系统的工作状态,当单片机工作异常时,看门狗会产生复位信号,将单片机系统复位。
特征:1、独立看门狗是一个递减计数器产生的复位。2、时钟信号是有独立RC振荡器产生。3、可以在待机和停止模式下运行。4、当看门狗被激活后,当递减为0是产生复位。
喂狗:如果在计数没减到 0 之前,重置计数器的值的话,那么就不会产生复位信号,这个动作我们称为。
作用:检测外界电磁干扰或硬件导致程序跑飞的问题。
二、工作原理
其本质还是一个计数器;

根据其工作原理图知:IWDG有一个输入(时钟LSI),为内部专门的 40Khz 低速时钟(LSI)驱动 ,经过分频器进行预分频,分频为工作时钟,然后提供给递减计数器,当递减计数器减为0时产生复位信号。为递减计数器赋值的过程称为喂狗,喂狗的作用就是不产生复位信号。
三、相关寄存器
3.1键寄存器(IWDG_KR)
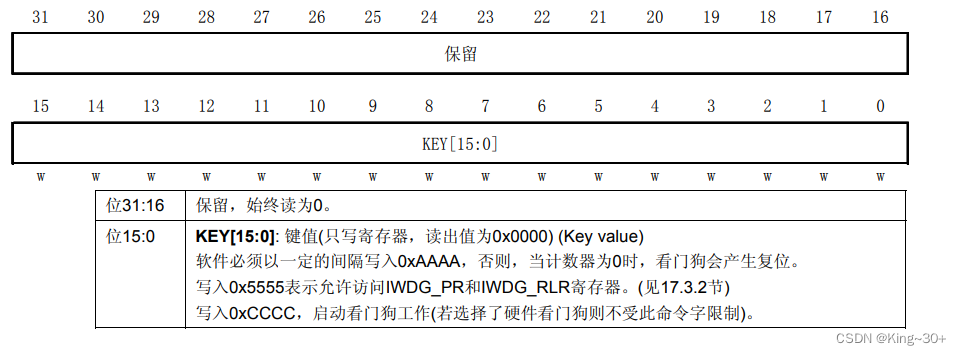
该寄存器共有16位,其作用为控制看门狗的相关操作,由软件进行设置:
主要的操作有三个:1、0XAAAA进行喂狗,只有这样才能将重装载寄存器的值进行喂狗;2、0X5555解除写保护,表示允许访问IWDG_PR和IWDG_RLR寄存器;3、写入入0xCCCC,启动看门狗工作。
3.2预分频寄存器(IWDG_PR)

此寄存器只有三位有效,其主要作用就是将来自时钟信号进行分频,从而供给看门狗使用。
3.3重装载寄存器(IWDG_RLR)

该寄存器的有效位数为12位,其作用为看门狗计数器的重装载值。每当向IWDG_KR 寄存器写入0xAAAA时,重装载值会被传送到计数器中。随后计数器从这个值开始递减计数。所以说最大的重装载值为2^12,最小的重装载值为1。
3.4状态寄存器(IWDG_SR)
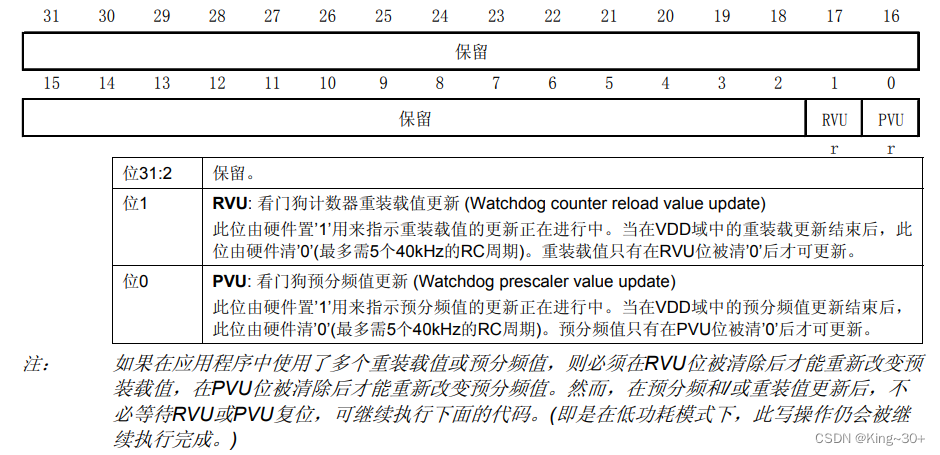
该寄存器只有两位,其主要的功能为: RVU: 看门狗计数器重装载值更新;PVU: 看门狗预分频值更新 。
3.5寄存器配置步骤
上述寄存器以及相关的位的配置步骤如下:
1、通过IWDG_KR 置为0xCCCC 使能看门狗;
2、通过IWDG_KR 置为0x5555 使能寄存器访问,可以访问PR与RLT寄存器;
3、通过IWDG_PR 的0-7位为预分频器;
4、通过IWDG_RLR 设置喂狗的值;
5、通过IWDG_SR 判断重装载值以及预分频系数是否更新完;
6、刷新计数器的值IWDG_RLR,再将IWDG_KR置为0XAAA进行反复的喂狗。
四、IWDG配置步骤
1、IWDG溢出时间计算

寄存器设置分频系数的方法: psc=4 * 2^prer,但最大值只能是 256;
2、IWDG 的配置步骤
1、取消PR/RLR寄存器写保护。
2、IWDG设置预分频系数和重装载值,启动IWDG。
3、及时喂狗,写入0XAAAA到IWDG_KR。
3、IWDG的HAL库驱动
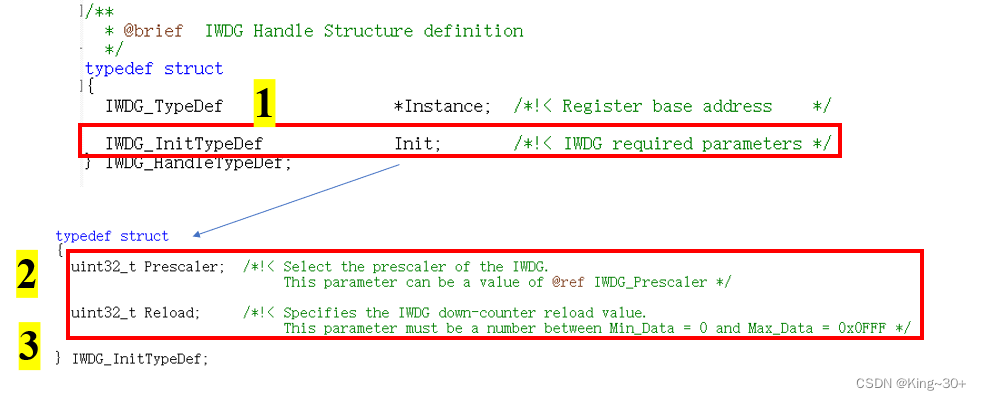
HAL_IWDG_Init 函数,涉及主要的寄存器IWDG_PR/RL/KP,使能IWDG设置预分频系数和重装载值。

其形参为结构体指针:IWDG_HandleTypeDef *hiwdg;进一步看主要由三个参数进行定义:
HAL_IWDG_Refresh 函数,涉及主要的寄存器IWDG_KR,把重装载寄存器的值重载到计数器中,也就是喂狗。
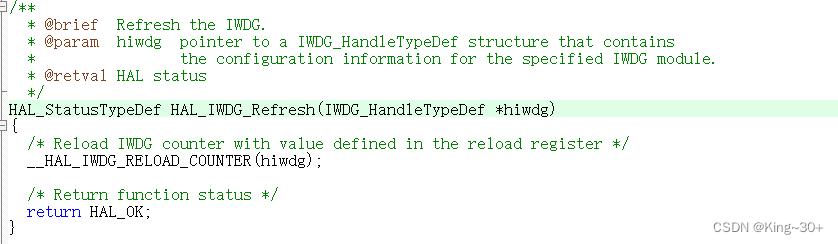
该库函数的参数 结构体指针:IWDG_HandleTypeDef *hiwdg;
五、源码及验证
5.1实验说明
可以看到 LED0 不停的闪烁,证明系统在不停的复位,否则 LED0 常亮。这时我们不停的按 KEY_0按键,可以看到 LED0 就常亮了,不会再闪烁。也就是说不按下KEY0按键时,程序不停地在看门狗复位,按下按键的过程也就是喂狗的过程,及时喂狗打断复位,让LED0长亮。
5.2源码
main.c
- #include "./SYSTEM/sys/sys.h"
- #include "./SYSTEM/usart/usart.h"
- #include "./SYSTEM/delay/delay.h"
- #include "./BSP/led/led.h"
- #include "./BSP/iwdg/IWDG.h"
- #include "./BSP/key/key.h"
-
- int main(void)
- {
- HAL_Init(); /* 初始化HAL库 */
- sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
- delay_init(72); /* 延时初始化 */
- led_init(); /* LED初始化 */
- key_init(); /* KEY初始化 */
- delay_ms(100); /* 延时1s,再初始化看门狗,作用是为了使LED0的灯进行可视化 */
- iwdg_init(IWDG_PR_PR_2,625); /* 预分频系数为64,重载值为625,看门狗的时间约为1s */
- LED1(0); /* 点亮LED0 */
- while(1)
- {
-
- if (key_scan()==1) /* 如果KEY0 按下,则喂狗 */
- {
- iwdg_feed(); /* 喂狗 */
- }
- }
- }

IWDG.c
- #include "./BSP/iwdg/IWDG.h"
- IWDG_HandleTypeDef g_iwdg_handle;//定义独立看门狗句柄;
- /**;
- * @brief 初始化独立看门狗
- * @param prer:预分频系数;
- * @arg 分频因子 = 4 * 2^prer. 但最大值只能是256!
- * @param rlr: 自动重装载值,0~0XFFF.
- * @note 时间计算(大概):Tout=((4 * 2^prer) * rlr) / 40 (ms).
- * @retval 无
- */
- void iwdg_init(uint8_t prer,uint16_t rlr)
- {
- g_iwdg_handle.Instance=IWDG;
- g_iwdg_handle.Init.Prescaler=prer;
- g_iwdg_handle.Init.Reload=rlr;
- HAL_IWDG_Init(&g_iwdg_handle);
- }
- /**;
- * @brief 喂狗函数
- * @param 无
- * @retval 无
- */
- void iwdg_feed(void)
- {
- HAL_IWDG_Refresh(&g_iwdg_handle);
-
- }
key.c
- #include "./BSP/key/key.h"
- #include "./SYSTEM/delay/delay.h"
- /**
- * @brief 初始化KEY相关IO口, 并使能时钟
- * @param 无
- * @retval 无
- */
- void key_init(void)
- {
- GPIO_InitTypeDef gpio_init_struct; //定义GPIO结构体
- __HAL_RCC_GPIOE_CLK_ENABLE();//使能GPIOB的时钟;
- gpio_init_struct.Pin=GPIO_PIN_4;//设置IO口的引脚;
- gpio_init_struct.Pull=GPIO_PULLUP;//设置IO口的工作模式
- gpio_init_struct.Mode=GPIO_MODE_INPUT;
- gpio_init_struct.Speed=GPIO_SPEED_FREQ_HIGH;//设置IO口的输入速度。
- HAL_GPIO_Init(GPIOE, &gpio_init_struct);
- }
-
- /**
- * @brief 判断按键是否按下
- * @param 无
- * @retval keyval如果是1就是按键按下,如果是0就是按键未按下
- */
-
- uint8_t key_scan()
- {
- uint8_t keyval=0;//定义一个返回值,用于判断按键是否按下
- if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4)==0)//判断按键是否按下
- {
- delay_ms(20);
- while(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4)==1);//判断按下后是否松开
- keyval=1;
- }
- return keyval;
-
- }
led.c
- #include "./BSP/led/led.h"
-
- /**;
- * @brief 初始化LED函数
- * @param 无
- * @retval 无
- */
- void led_init(void)
- {
- __HAL_RCC_GPIOB_CLK_ENABLE();//使能GPIOB的时钟;
- GPIO_InitTypeDef gpio_init_struct;//定义GPIO结构体
- gpio_init_struct.Mode=GPIO_MODE_OUTPUT_PP; //设置IO口的工作模式
- gpio_init_struct.Pin=GPIO_PIN_5;//设置IO口的引脚;
- gpio_init_struct.Pull=GPIO_PULLUP;//设置IO口上下;
- gpio_init_struct.Speed=GPIO_SPEED_FREQ_HIGH;//设置IO的速度;
- HAL_GPIO_Init(GPIOB, &gpio_init_struct);
- LED1(1);//关闭LED灯;
- }
-
led.h
- #ifndef __LED_H
- #define __LED_H
-
- #include "./SYSTEM/sys/sys.h"
- void led_init(void);//初始化LED函数
-
- #define LED1(x) do{ x ? \
- HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_SET): \
- HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_RESET); \
- }while(0)//进行宏定义,通过LED1(x),设置一个三目运算符,如果是1就关闭LED,如果是0就打开LED.
- #endif
5.3实验现象
iwdg实验
链接:https://pan.baidu.com/s/1Al3ryi_T9vZxanOJnFt2Qg
提取码:1022
总结: 本节的主要内容,我们学习的是STM32单片的IWDG即独立看门狗的相关知识,主要的内容有:IWDG的简介与工作原理,相关的寄存器讲解,配置的步骤以及HAL库的相关函数,最后通过实验实现了IWDG控制LED的相关实验现象。本节的内容不算太难,在学习的同时还能很好复习之前的LED、KEY等模块。
创作不易,还请大家多多点赞支持!!!

