
- 1HarmonyOS/OpenHarmony应用开发-HDC环境变量设置_hdc环境变量配置
- 2RabbitMQ的远程Web管理与监控工具_mqviewer
- 3cocos2dx lua中异步加载网络图片,可用于显示微信头像
- 4分享一个好用的AI 动漫图片工具 - AI Anime Generator,输入文字,1分钟生成动漫图片_AI绘画工具
- 5error pulling image configuration: Get https://registry-1.docker.io/v2/library/redis/blobs/sha256:7e_github error pulling image configuration
- 6速盾:如何评估 CDN 对网络安全的影响?
- 7springboot引入kafka
- 8RabbitMQ的Windows版安装教程_windows安装rabbitmq
- 9TON区块链之Hello World_ton钱包 连接 api
- 10idea 把一个git分支的部分提交记录合并到当前分支上比较两个分支的代码区别_idea将其它分支上的部分合并到当前分支
PX4开源飞控--开发环境搭建 编译仿真及烧录_px4编译
赞
踩
目录
3、编译对应仿真环境的固件((jMAVSim、Gazebo 、AirSim仿真))
前言
主要介绍过PX4开源飞控的开发环境搭建、编译、仿真及烧录,在仿真环节启动无人机模拟器,通过外部QGC地面站控制无人机或通过外部UDP服务器接收无人机数据。
一、PIXHAWK、PX4、APM 简述
1、概念介绍(PIXHAWK、PX4、APM)
PIXHAWK是应用较广的开源飞控硬件平台,PX4和APM都是开源飞控软件平台,均可以烧写到PIXHAWK这款硬件板上
PX4飞控软件平台(PX4专为PIXHAWK开发的),它提供了一个虚拟环境,可以用来验证无人机的飞控算法,也可以连接开源硬件PIXHAWK。
PX4地面控制站被称为QGroundControl(简称QGC),PX4与地面站之间的通信是用mavlink协议,QT可以对地面站进行二次开发
APM飞控软件平台专为Arduupilot开发的固件,也可以烧写到PIXHAWK上
APM地面控制站被称为Mission Planner(简称MP)
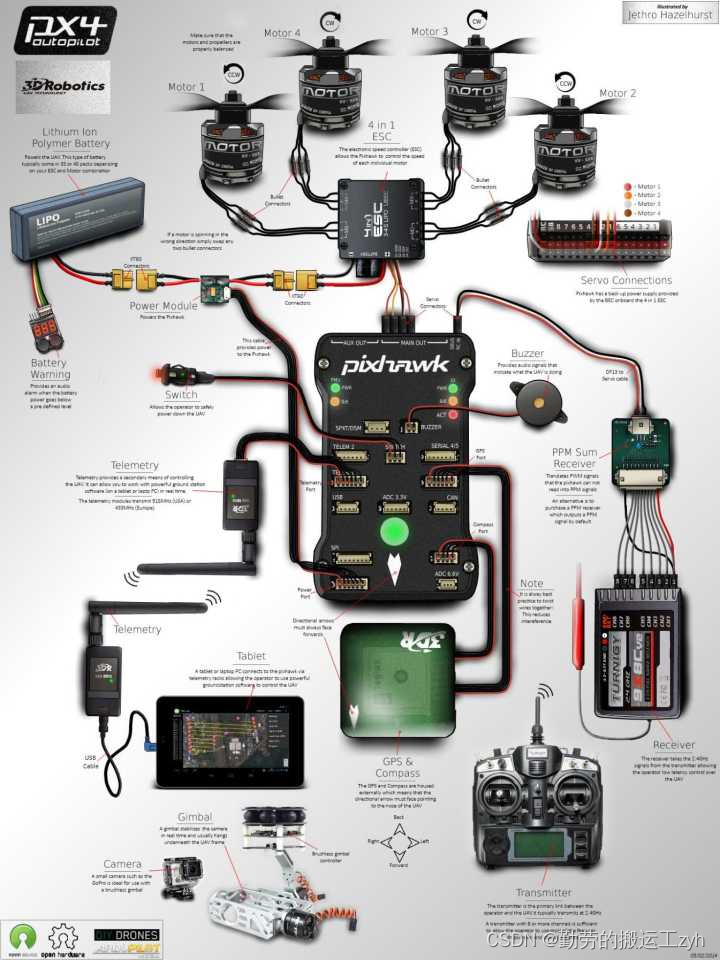
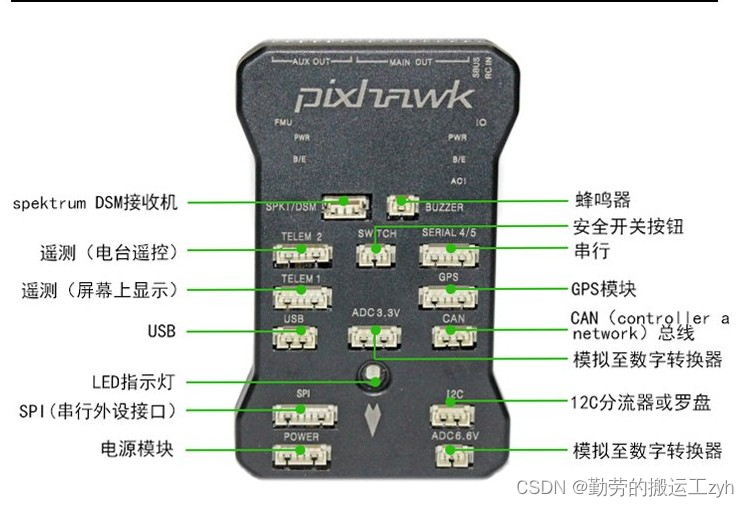
2、PIXHAWK硬件接线调试说明
硬件接口调试文档参考:接口说明 · GitBook

3、PX4开发编译仿真烧录流程
PX4的开发编译环境有Linux、window和MacOS系统这几种,在ubuntu系统下比较高效方便,搭建流程如下:
(1)下载PX4固件源码
(2)下载官方docker容器(集成了开发编译环境)
(3)编译对应仿真环境的固件
(4)编译对应飞控板的固件(Pixhawk飞控板)
4、官方指导文档和源码地址汇总
PX4官方使用者手册:PX4 Autopilot User Guide | PX4 Guide (main)
mavlink协议官方指导书:Guide · MAVLink Developer Guide
PX4源码网址:GitCode - 开发者的代码家园
原本的Firmware 已经更名为PX4-Autopilot
git可下载最新版本源码固件:
git clone https://github.com/PX4/PX4-Autopilot.git --recursive二、ubuntu下搭建PX4开发编译仿真环境
在ubuntu系统下比较高效方便,为了降低安装和使用过程中系统崩溃的风险,在本地电脑中安装VM虚拟机,虚拟机安装ubuntu 18.04或ubuntu 20.04系统,安装过程比较简单,本文不再赘述。在此,为了方便后期移植和系统维护,建议使用官方提供的docker容器,容器集成了开发编译仿真环境。
1、下载px4源码
- mkdir px4
- cd px4
- git clone https://github.com/PX4/PX4-Autopilot.git --recursive
可能因为网络问题中止,那就删除之后,重新多下载几次,不行就翻墙。
PX4代码架构:
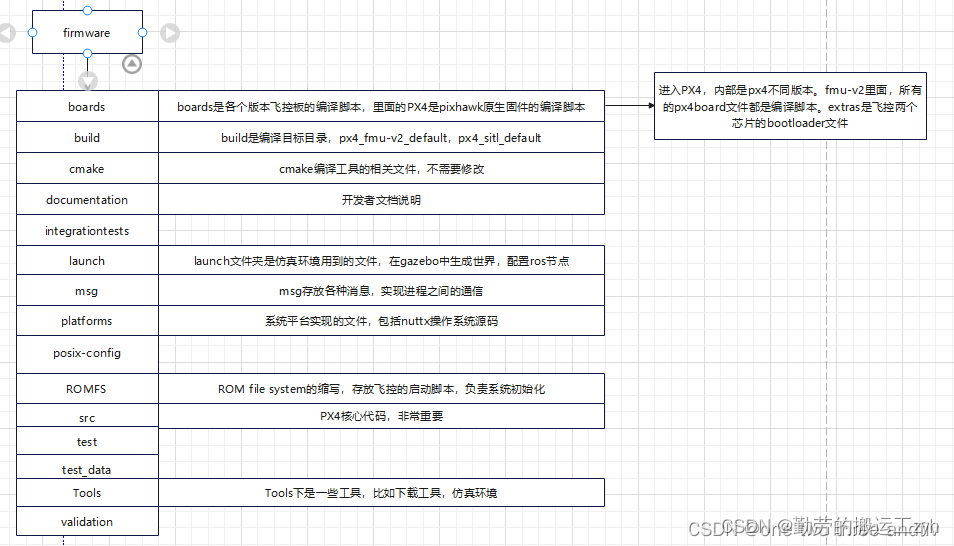
2、下载官方docker容器(集成了开发编译环境)
- ubuntu系统中安装docker
- sudo apt update
- sudo apt install docker-ce docker-ce-cli containerd.io
-
拉取官方docker镜像
docker pull px4io/px4-dev-ros2-foxy注:上述使用的是ros2-foxy的容器,官方还提供了不同容器,如下所示,层层递进,在前一层的基础上进行构建,对应不同的仿真环境,体积也不一样,一般也可选择 px4io/px4-dev-simulation-focal ,这个容器是以`px4io/px4-dev-base-focal`为基础层构建的,其中加入了模拟仿真所需的环境和工具。
- - px4io/px4-dev-base-focal
- - px4io/px4-dev-nuttx-focal
- - px4io/px4-dev-simulation-focal
- - px4io/px4-dev-ros-noetic
- - px4io/px4-dev-ros2-foxy
- - px4io/px4-dev-ros2-rolling
- - px4io/px4-dev-base-jammy
- - px4io/px4-dev-nuttx-jammy
- 创建容器
- # enable access to xhost from the container
- xhost +
-
- # Run docker
- docker run -it --privileged \
- -v /home/ubuntu/Downloads/px4/:/home/px4 \
- -v /tmp/.X11-unix:/tmp/.X11-unix:ro \
- -e DISPLAY=:0 \
- --name=px4_test1 \
- --net=host \
- px4io/px4-dev-ros2-foxy:latest /bin/bash
特别说明:
“-v /home/ubuntu/Downloads/px4:/home/px4”:表示的是,将我ubuntu系统的/home/ubuntu/Downloads/px4/目录映射到容器里面的/home/px4/目录,PX4源码 PX4-Autopilot 这个文件夹,在我ubuntu系统的/home/ubuntu/Downloads/px4/下。
“--name=px4_test1”:表示的是给容器起的某个名字叫 px4_test1,可任意取。
3、编译对应仿真环境的固件((jMAVSim、Gazebo 、AirSim仿真))
- 初次编译px4(使用 jMAVSim 模拟器,较为简易)
- #进入容器里面后,cd进入px4源码文件夹
- cd /home/px4/PX4-Autopilot
- make px4_sitl jmavsim
编译最后出现错误:
- BUILD SUCCESSFUL
- Total time: 0 seconds
- Picked up JAVA_TOOL_OPTIONS: -Dfile.encoding=UTF8
- Unrecognized option: --add-exports
- Error: Could not create the Java Virtual Machine.
- Error: A fatal exception has occurred. Program will exit.
这个错误表明在运行jMAVSim时,Java虚拟机(JVM)无法识别`--add-exports`选项。这个问题通常与使用的Java版本有关。`--add-exports`是Java 9引入的一个新选项,用于配置模块之间的访问权限。如果你使用的Java版本低于9,你将会遇到此错误。
检查Java版本, 如果你看到的版本是低于9(比如1.8),那么你需要升级Java版本:
java -version升级一下java即可:
- apt-get update
- apt-get install -y openjdk-11-jdk
完成Java版本更新后,尝试再次编译并运行jMAVSim仿真:
- #设置飞行速度
- export PX4_SIM_SPEED_FACTOR=10
-
- #编译
- make px4_sitl jmavsim
注:也可以编译其它模拟器的仿真环境,如 Gazebo, Gazebo Classic 和 AirSim,(Gazebo取代了旧的 Gazebo Classic 模拟器)
- #例如 Gazebo:
- make px4_sitl gazebo
-
- #例如 Gazebo Classic:
- make px4_sitl gazebo-classic
- 启动仿真模拟器:
编译成功后系统将自动打开 jMAVSim模拟器,这时无人机仿真环境就出现了。
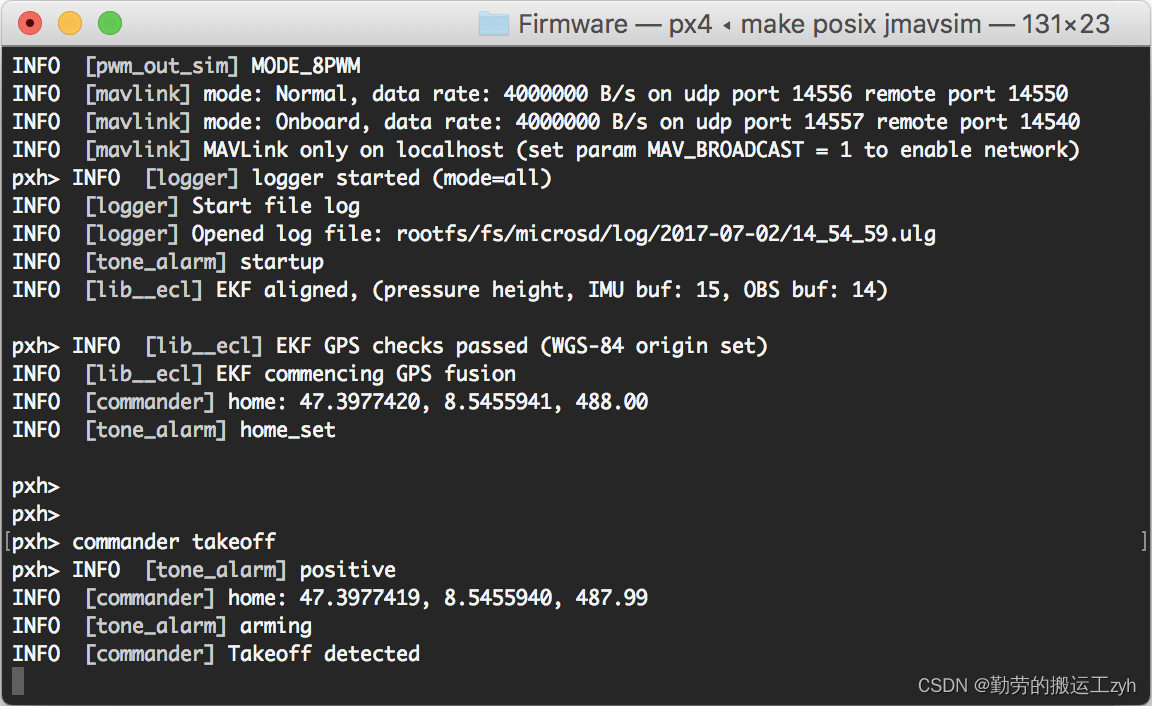
输入起飞指令:
pxh> commander takeoff

- 启动地面站
当然,使用地面控制台进行模拟飞行更接近真实操作,下载地面站模拟器(QGroundControl),不同系统对应不同安装包,软件下载地址如下:
Download and Install | QGC Guide (master)
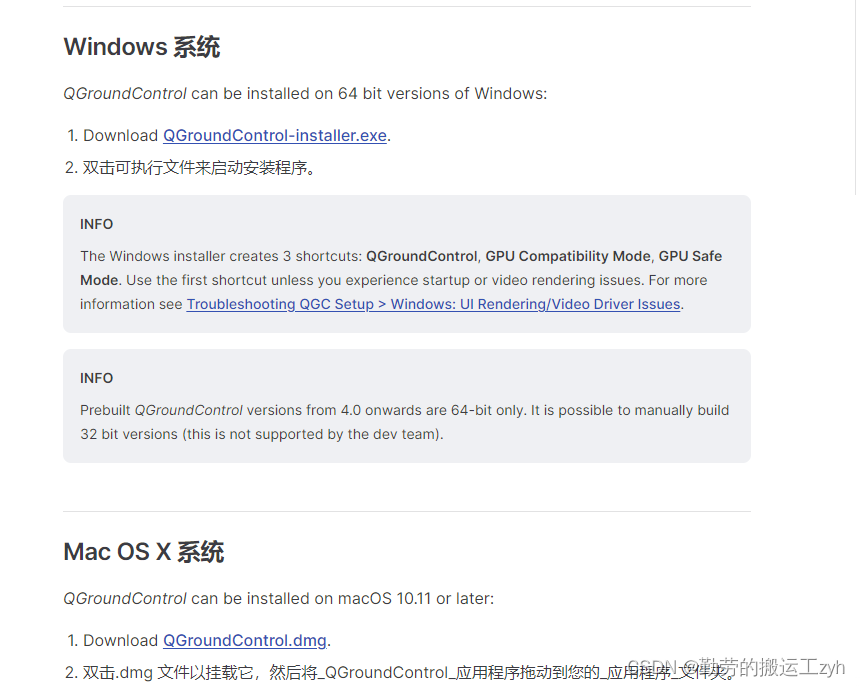
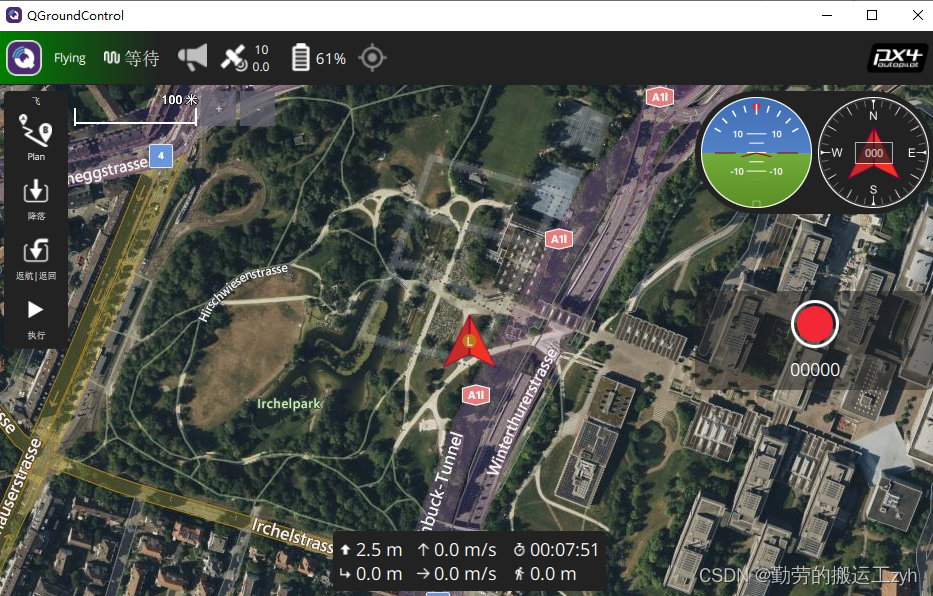
我选择在Windows系统安装QGC,因此下载QGroundControl-installer.exe,双击即可安装,就可以用 QGroundControl 模拟器来控制虚拟无人机了,如起飞、设置高度、航点等。
地面站一直是处于断开连接状态:

- 启动仿真模拟器的mavlink,在局域网和QGC通信
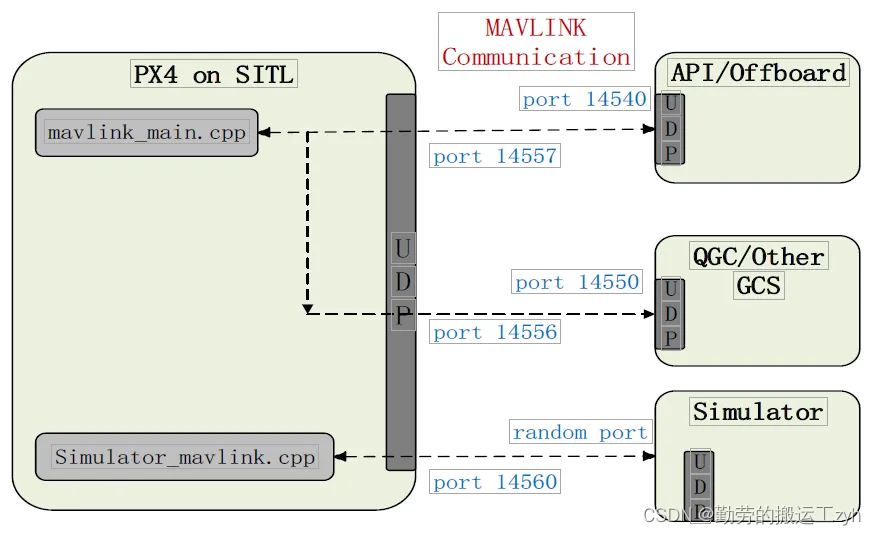
PX4内部UDP端口说明:
地面站(监听本地UDP端口14550),接收PX4数据
外部开发人员API监听PX4的UDP端口:14540。对于多个目标模拟,PX4按顺序为14540到14549的每个实例分配一个单独的远程端口(其他实例都使用端口14549)。
输入:
mavlink start -p -u 14556 -o 14550-u表示的是绑定的本地端口,-o表示的是远程连接对方端口
也可以使用-t命令和特定的IP通信. :mavlink start -p -u 14556 -t 192.168.x.x -o 14550
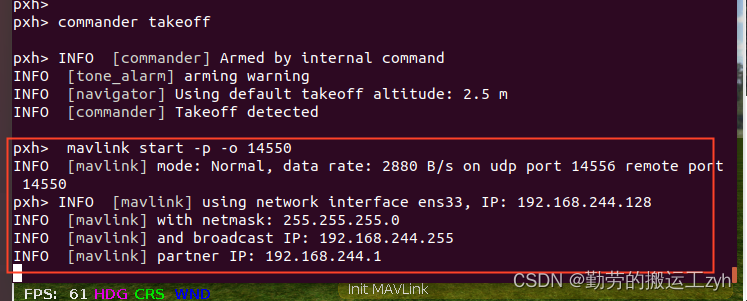
已经和远端的模拟器连接上了
- 启动仿真模拟器的mavlink,在局域网和自己的UDP服务器通信
在上面的步骤中,在终端窗口启动了一个mavlink和QGC通信,那么如何使自己的UDP服务器像QGC一样接收PX4的数据呢?操作如下:
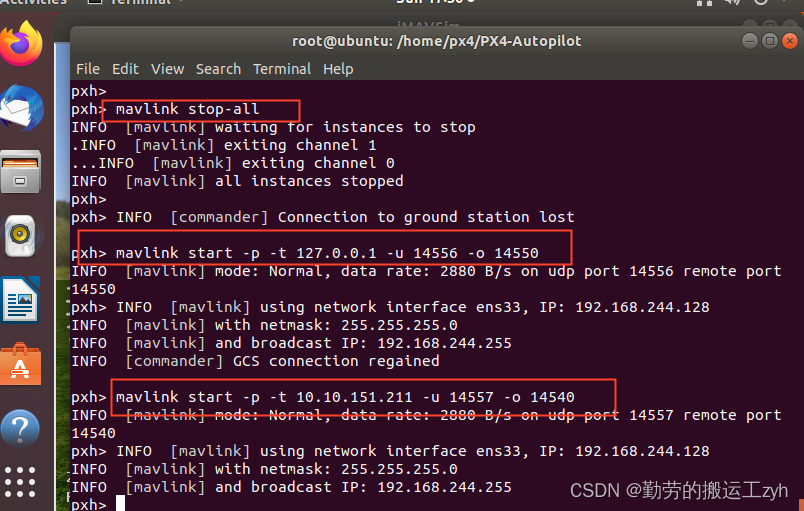
先停止之前的所有通信:
mavlink stop-all启动仿真模拟器的mavlink和QGC通信:(我的QGC安装在本地电脑上)
mavlink start -p -u 14556 -t 127.0.0.1 -o 14550启动仿真模拟器的mavlink和UDP服务器通信,端口不能和QGC通信的端口冲突:
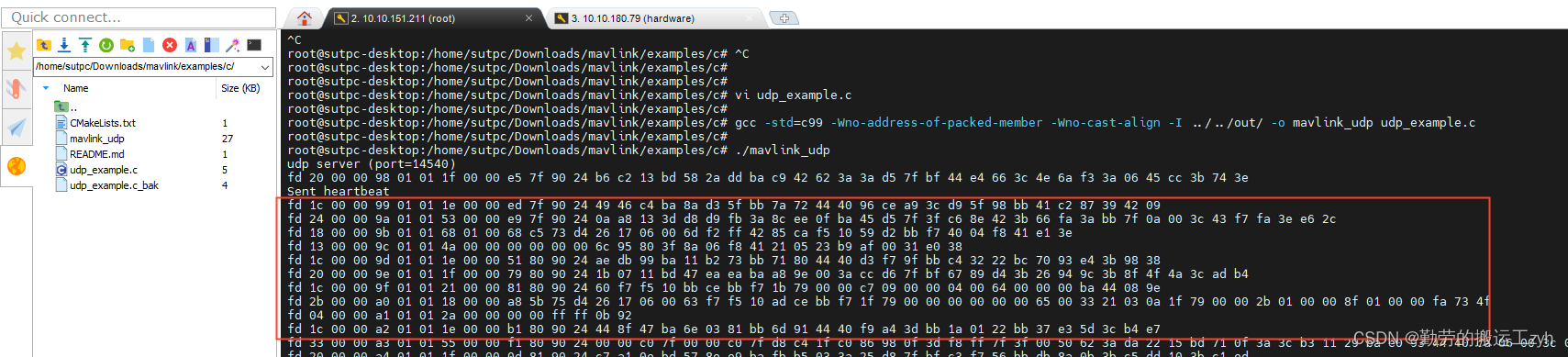
UDP服务器自己手写了一个, ip是10.10.151.211,端口14540
mavlink start -p -u 14557 -t 10.10.151.211 -o 14540可以看到udp服务器接收到了一堆数据,这些就是mavlink协议数据了,mavlink协议参照官方指导书:Guide · MAVLink Developer Guide
4、编译对应飞控板的固件(Pixhawk飞控板)
- 编译

不同版本的开发板对应指令如上,我是为Pixhawk 2.4.8编译的,因此指令如下:
- cd PX4-Autopilot
- make px4_fmu-v3_default
注:也可以通过指令来查看对应开发板的指令:make list_config_targets
编译完成后会在 build/nuttx_px4fmu-v3_default/ 目录下生成一个叫 px4fmu-v3_default.px4 的文件,这个文件就是我们需要烧写到Pixhawk中的固件程序。
- 将固件烧录到飞控板
必须要通过有线连接的方式进行固件的烧录。
PX4固件代码的烧入方式1(ubuntu终端窗口命令行烧录):
将Pixhaw使用USB线接入到计算机上,在ubuntu系统的/dev/目录下会有一个叫作ACM0的设备文件,即是Pixhawk飞控。通过终端,使用不同的命令针对不同的硬件和型号进行Cmake编译,例如:
make px4_fmu-v3_default uploadPX4固件代码的烧入方式2 (QGC地面站升级):
通过USB连接电脑启动QGC地面站中的自定义固件类型进行烧入,
启动QGC地面站,在固件位置 → 重新插拔USB→选择高级设置→自定义固件文件 → 找到PX4-Autopilot中的build中的 .px4文件即可。

