- 1Anaconda 安装、配置、使用详细教程_anaconda详细教程及使用教程惜
- 2清理Anaconda_anaconda占用空间太大
- 3Uncaught Error: [$injector:nomod] Module 'xxx' is not available! You either misspelled the m_angular中出现module 'ui.select' is not available! you
- 4真正的官方GPT4.0国内版
- 5部署你自己的导航站-dashy_dashy 配置
- 6如何用GPT进行成像光谱遥感数据处理?
- 7【 华为OD机试 2023】 上班之路/是否能到达公司(C++ Java JavaScript Python)_python机考:上班之路
- 8QT入门学习(三)_writedatagram
- 9【Linux权限】Shell命令及运行原理 | Linux权限管理 | 粘滞位_linux 怎样打开超级权限的shell
- 10【ES数据可视化】kibana实现数据大屏_怎么把kibana中的图标集成到自己的项目中
OpenCV--拟合平面_平面拟合
赞
踩
项目场景:
在三维空间中,如何通过一组离散的3维坐标来拟合平面空间,使得任意一组空间坐标**(Px, Py, Pz)**在平面方程上。
问题描述
给定n个三维点的坐标,根据这些点坐标由最小二乘法拟合平面。
原因分析:
平面方程一般为Ax+By+Cz+D = 0,为了方便计算这里将平面方程变形为z=Ax+By+C;
像素坐标通过相机内参及外参数矩阵可以得到n个三维点坐标,理想情况下应满足
{
z
0
=
A
x
0
+
B
y
0
+
C
z
1
=
A
x
1
+
B
y
1
+
C
⋯
\left\{z0=Ax0+By0+Cz1=Ax1+By1+C⋯\right.
⎩
⎨
⎧z0=Ax0+By0+Cz1=Ax1+By1+C⋯
但由于测量误差的存在,三维点并不都严格符合在一个平面上,所以上述方程无解,需要用最小二乘法来求解上述方程组。
解决方案:
构建方程目标函数:
J
(
A
,
B
,
C
)
=
∑
i
=
0
n
(
A
x
i
+
B
y
i
+
C
−
z
i
)
2
J(A, B, C)=\sum_{i=0}^n\left(A x_i+B y_i+C-z_i\right)^2
J(A,B,C)=i=0∑n(Axi+Byi+C−zi)2
求解A,B,C 使得损失函数J最小,采取最小二乘法,分别对A,B,C求偏导,令其偏导数均为0,如下所示:
{
∂
J
/
∂
A
=
2
∗
∑
i
=
0
n
(
A
x
i
+
B
y
i
+
C
−
z
i
)
∗
x
i
=
0
∂
J
/
∂
B
=
2
∗
∑
i
=
0
n
(
A
x
i
+
B
y
i
+
C
−
z
i
)
∗
y
i
=
0
∂
J
/
∂
C
=
2
∗
∑
i
=
0
n
(
A
x
i
+
B
y
i
+
C
−
z
i
)
=
0
\left\{∂J/∂A=2∗∑ni=0(Axi+Byi+C−zi)∗xi=0∂J/∂B=2∗∑ni=0(Axi+Byi+C−zi)∗yi=0∂J/∂C=2∗∑ni=0(Axi+Byi+C−zi)=0\right.
⎩
⎨
⎧∂J/∂A=2∗∑i=0n(Axi+Byi+C−zi)∗xi=0∂J/∂B=2∗∑i=0n(Axi+Byi+C−zi)∗yi=0∂J/∂C=2∗∑i=0n(Axi+Byi+C−zi)=0
展开,变形得到:
{
∑
2
(
A
x
i
+
B
y
i
+
C
−
z
i
)
x
i
=
0
∑
2
(
A
x
i
+
B
y
i
+
C
−
z
i
)
y
i
=
0
∑
2
(
A
x
i
+
B
y
i
+
C
−
z
i
)
=
0
\left\{∑2(Axi+Byi+C−zi)xi=0∑2(Axi+Byi+C−zi)yi=0∑2(Axi+Byi+C−zi)=0\right.
⎩
⎨
⎧∑2(Axi+Byi+C−zi)xi=0∑2(Axi+Byi+C−zi)yi=0∑2(Axi+Byi+C−zi)=0
其中,A, B, C为变量的线性方程组,写为矩阵形式有:
∣
∑
x
i
2
∑
x
i
y
i
∑
x
i
∑
x
i
y
i
∑
y
i
2
∑
y
i
∑
x
i
∑
y
i
n
∣
⋅
∣
A
B
C
∣
=
∣
∑
z
i
x
i
∑
z
i
y
i
∑
z
i
∣
\left|∑x2i∑xiyi∑xi∑xiyi∑y2i∑yi∑xi∑yin\right| \cdot\left|ABC\right|=\left|∑zixi∑ziyi∑zi\right|
∑xi2∑xiyi∑xi∑xiyi∑yi2∑yi∑xi∑yin
⋅
ABC
=
∑zixi∑ziyi∑zi
构建矩阵方程Ax = b, 其中A为上述方程中左边的参数矩阵方程, x为变量(ABC), b为等式右边的变量。
通过矩阵运算得到 x = A − 1 ∗ b x=\text { A }^{-1} * b x= A −1∗b, 最终得到参数向量[A B C]。
结果展示:
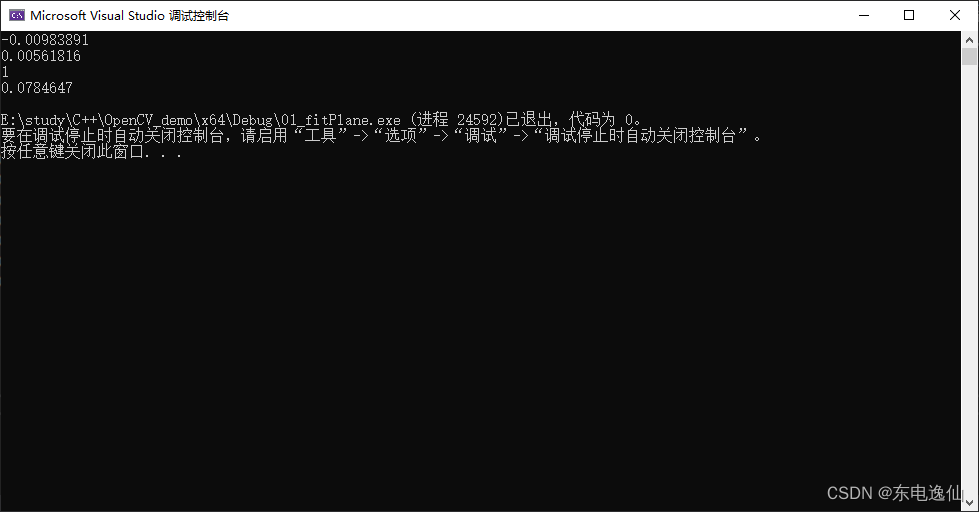
随机给一组点进行测试:(该点为三维坐标系中Oxy平面附近的一组点,坐标的z值在0附近小范围波动,拟合的平面法向量应该近似等于(0,0,1))。
完整代码如下:
#include <iostream> #include <opencv2/opencv.hpp> #include <vector> void CaculatefitPlane(std::vector<cv::Point3f> points, std::vector<double> &res) { // 最小二乘法拟合平面 x = A^-1 * B // step1 create matrix of A, B, X cv::Mat A = cv::Mat::zeros(3, 3, CV_64FC1); // Matrix cv::Mat B = cv::Mat::zeros(3, 1, CV_64FC1); // vector cv::Mat X = cv::Mat::zeros(3, 1, CV_64FC1); // vector // step2 input points double xi = 0; double xi2 = 0; double xiyi = 0; double yi = 0; double yi2 = 0; double zi = 0; double zixi = 0; double ziyi = 0; for (int i = 0; i<points.size(); i++) { xi2 += (double)points[i].x * (double)points[i].x; yi2 += (double)points[i].y * (double)points[i].y; xiyi += (double)points[i].x * (double)points[i].y; xi += (double)points[i].x; yi += (double)points[i].y; zixi += (double)points[i].z * (double)points[i].x; ziyi += (double)points[i].z * (double)points[i].y; zi += (double)points[i].z; } A.at<double>(0, 0) = xi2; A.at<double>(1, 0) = xiyi; A.at<double>(2, 0) = xi; A.at<double>(0, 1) = xiyi; A.at<double>(1, 1) = yi2; A.at<double>(2, 1) = yi; A.at<double>(0, 2) = xi; A.at<double>(1, 2) = yi; A.at<double>(2, 2) = points.size(); B.at<double>(0, 0) = zixi; B.at<double>(1, 0) = ziyi; B.at<double>(2, 0) = zi; // step3 calculate plane // Ax+by+cz=D, c = 1 X = A.inv() * B; //A res.push_back(X.at<double>(0, 0)); //B res.push_back(X.at<double>(1, 0)); //Z的系数为1 res.push_back(1.0); //C res.push_back(X.at<double>(2, 0)); return; } int main() { std::vector<cv::Point3f> points3d; std::vector<double> planeFun; points3d.push_back(cv::Point3f(10.1, 20.5, 0.12)); points3d.push_back(cv::Point3f(15.1, 34.5, 0.1)); points3d.push_back(cv::Point3f(13.1, 7.5, -0.05)); points3d.push_back(cv::Point3f(10.1, 25.5, 0.03)); points3d.push_back(cv::Point3f(14.1, 10.5, 0.1)); points3d.push_back(cv::Point3f(16.1, 40.5, 0.2)); points3d.push_back(cv::Point3f(32.1, 10.5, -0.2)); CaculatefitPlane(points3d, planeFun); for (int i = 0; i < planeFun.size();i++) { std::cout << planeFun[i] << std::endl; } } for (int i = 0; i < planeFun.size();i++) { std::cout << planeFun[i] << std::endl; } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
结果如下: