
热门标签
热门文章
- 1华为 ensp VRRP虚拟路由器冗余协议_ensp vrrp配置网关冗余
- 2基于深度学习神经网络YOLOv5目标检测的手势识别系统_yolov5手势识别创新点
- 3异常检测Anomalib现存小bug记录_anomalib 视觉检测
- 4论文笔记之超分二:IKC-MetaSR-ODEInspired_ikc论文
- 5【gRPC使用问题1】gRPC的proto内import其他proto导致的一次小坑
- 6学校计算机拓扑图,校园网络工程规划与设计毕业论文+拓扑图源文件
- 7自然语言处理从入门到应用——预训练模型总览:预训练模型存在的问题
- 8python笔记——range()与for-in循环_for in 和for range
- 9fastadmin的安装及使用bower安装前端资源依赖包_fastadmin资源包
- 10wsl 安装jupyter_在Windows子系统linux wsl2中配置jupyter笔记本
当前位置: article > 正文
KUKA机器人自动回原点程序
作者:凡人多烦事01 | 2024-03-24 14:02:49
赞
踩
KUKA机器人自动回原点程序
一、创建全局变量点
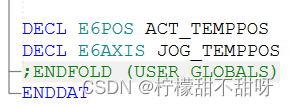
创建两个全局变量分别用于储存机器人的笛卡尔姿态与关节角姿态。
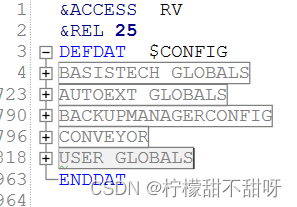
打开System文件夹中的config文件创建全局变量的点位。
在USER GROBALS用户自定义变量Userdefined variables下创建一个E6POS类型的点位,一个E6AXIS类型的点位。
二、创建回原点的程序
在process文件夹下创建一个名为AUT_HOME的程序

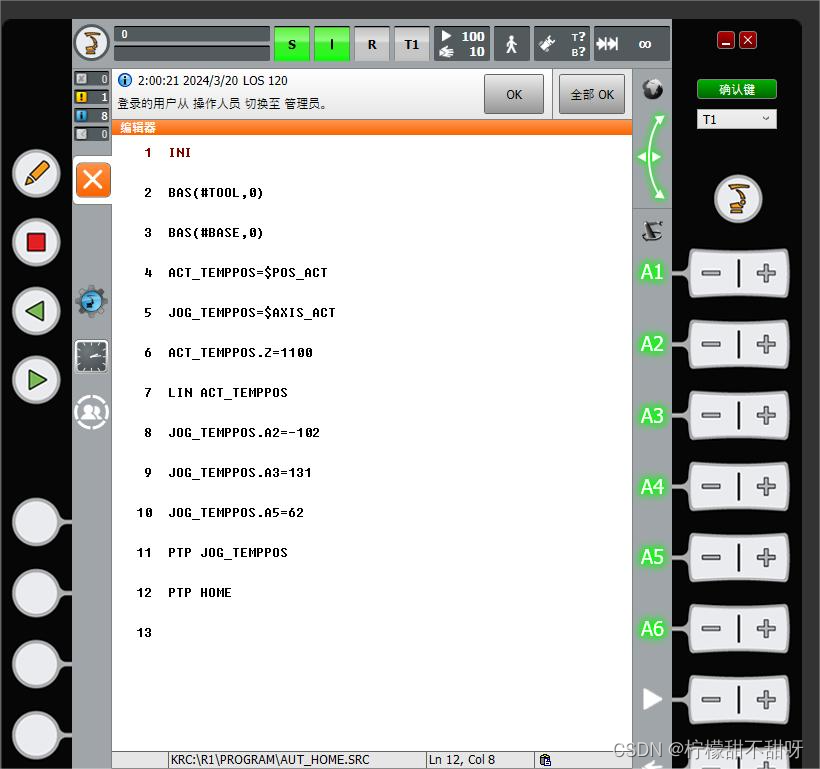
三、添加程序指令
定义当前回原点程序机器人使用的坐标系,案例程序使用默认的工具坐标系和基坐标系。
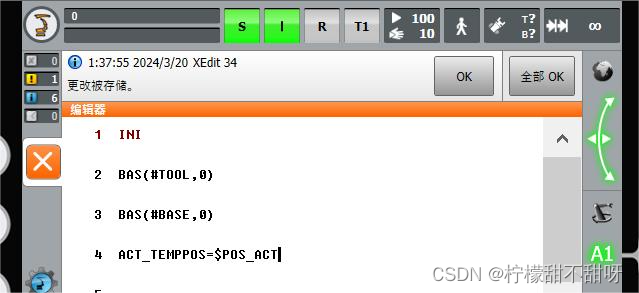
获取机器人当前的笛卡尔坐标系的位姿,KUKA机器人系统变量为$POS_ACT。
获取机器人当前的关节角的位姿,KUKA机器人系统变量为$AXIS_ACT。

对机器人高度Z进行对应的赋值,并运动至该高度。

对机器人需要释放的关节角进行赋值,关节运动机器人。

最后运动至机器人示教的原点位置

总体程序框架如下图所示:
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

